以人工肌肉为代表的软体执行器可以模拟天然肌肉的可控致动行为,将多种形式的外界能源直接转换成机械动能,为柔性机械系统提供强劲、低噪且高自由度的机械动力,是新一代软体机器人、柔性可穿戴外骨骼等先进装备开发的基础理论与关键技术。我们长期聚焦高性能人工肌肉和多功能软体执行器,面向效能增强和柔性集成等国际学术前沿,围绕驱动新机制探索与活性基材开发、执行器多功能化与构效增强等方面进行了系统性的基础研究,并开展了功能性软体执行器在软体机器人、医疗康复以及智能织物等工程领域的应用研究。
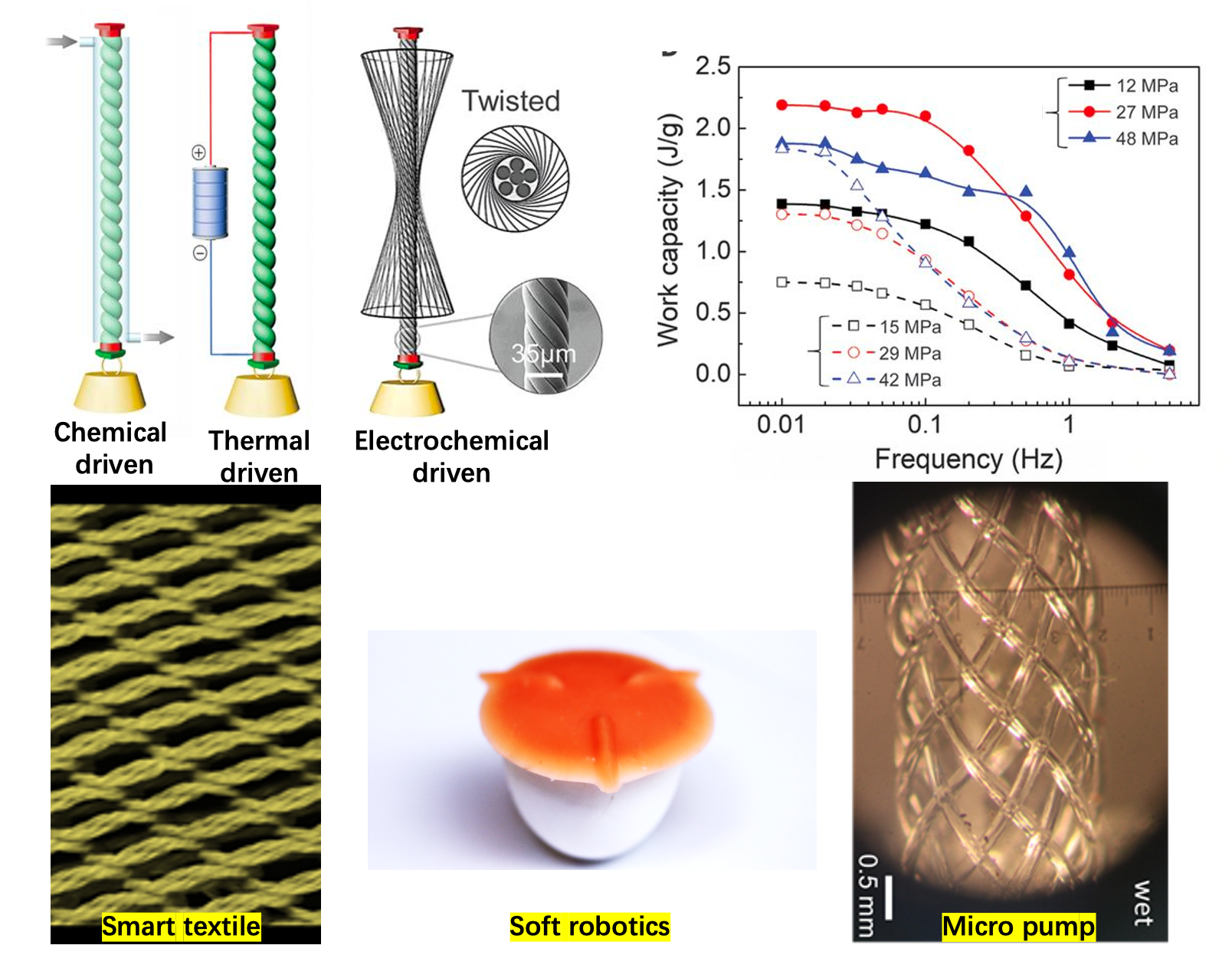
1 高性能人工肌肉 纤维形态人工肌肉具有轴向本构强度高、集成方式灵活多样等天然优势,是实现执行器定向大功率输出的理想驱动形态。我们基于压缩驱动载体注入行程的效能优化思想,建立了成纤主体、活性客体以及驱动载体三元效能关系模型,发展了驱动活性单元和力学承重单元的功能分区式肌肉纤维拓扑结构理论,提出了一种壳层驱动–人工肌肉纤维设计原则(Sheath–run artificial muscles, SRAMs),打破了人工肌肉纤维效能受限的结构壁垒,实现了输出功率密度高达人体肌肉40余倍的多机制驱动人工肌肉纤维,并为提升人工肌肉机械承重和抗物理破坏能力等综合性能提升提供解决方案(Science, 2019, 365(6449), 150–155)。 其中,电化学驱动具有能量转化效率高、体态可自锁以及操控精度高等天然优势, 是开发微型软体机器人的理想激励机制。针对传统的电化学肌肉只能在极低的电压扫速下产生单向冲程,难以满足柔性机械系统的动力需求等机制瓶颈,我们提出了“离子限号迁移”的功能调控策略,发现并阐明了“电渗流分子泵入”协同驱动新机制,实现了安全电压窗口下人工肌肉的双向冲程,并摆脱了驱动行程的电压扫速依赖性,揭示了离子有效尺寸、注入方式与机械能转化间的本质关联,攻克了低压驱动人工肌肉冲程和功率受限的机制难题(Science, 2021, 371(6528), 494–498)。
多种能源驱动形式的人工肌肉纤维及其应用(包括智能布料、水下机器人以及微型泵)
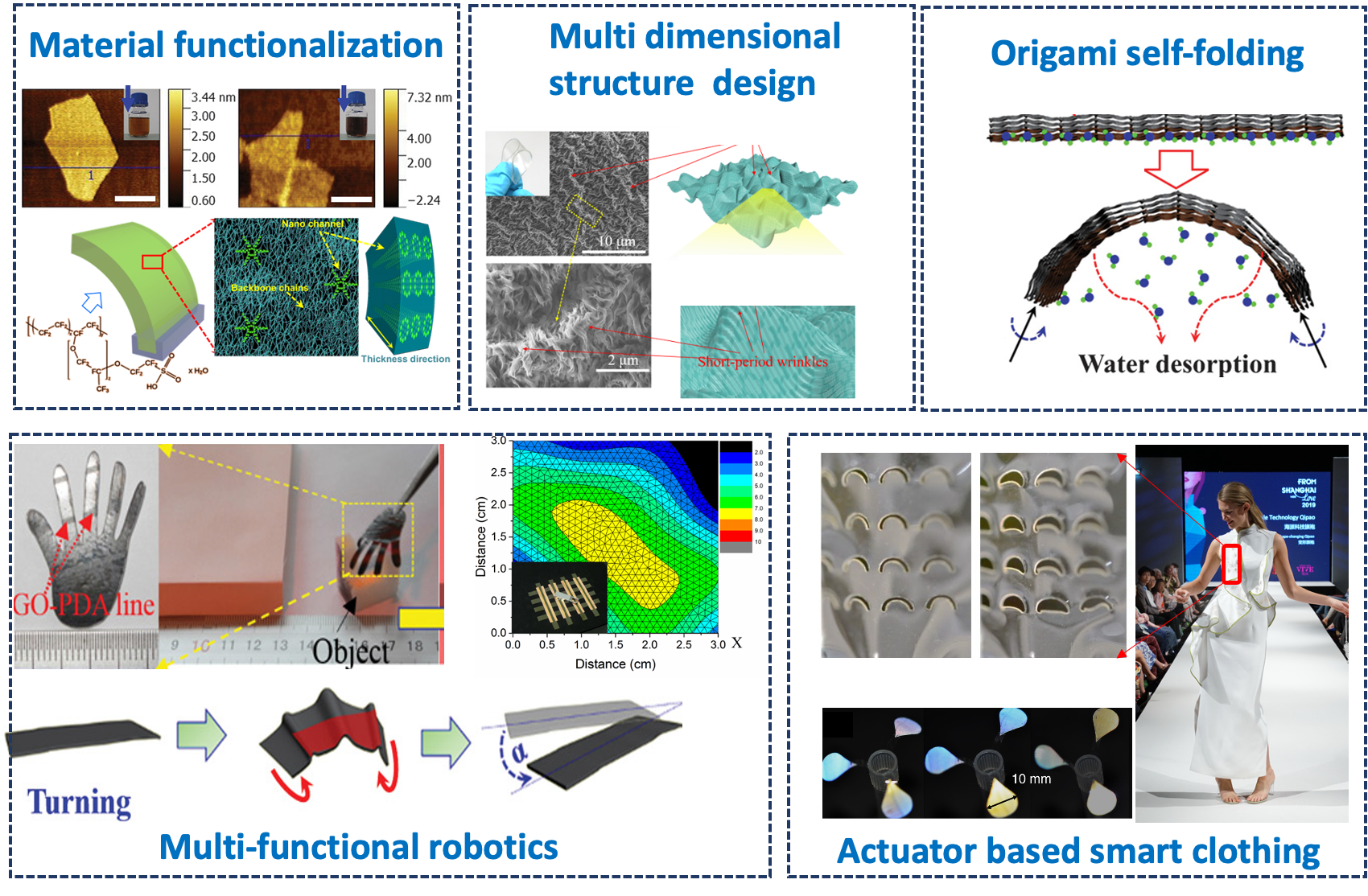
多功能薄膜形态执行器及其应用