Lei Fu#, Weiqiang Zhao#, Jiayao Ma#, Mingyuan Yang, Xinmeng Liu, Lei Zhang*, Yan Chen*. A Humidity-Powered Soft Robot with Fast Rolling Locomotion. Research, 2022, 2022, 9832901.
(https://doi.org/10.34133/2022/9832901)
Chuhan Xu#, Jiayao Ma#, Lei Fu, Xinmeng Liu, Lei Zhang*, Yan Chen*. An Ultra-Fast Rolling Double-Helical Robot Driven by Constant Humidity. Advanced Science, 2025, 12(23), 2500577.
(https://doi.org/10.1002/advs.202500577)
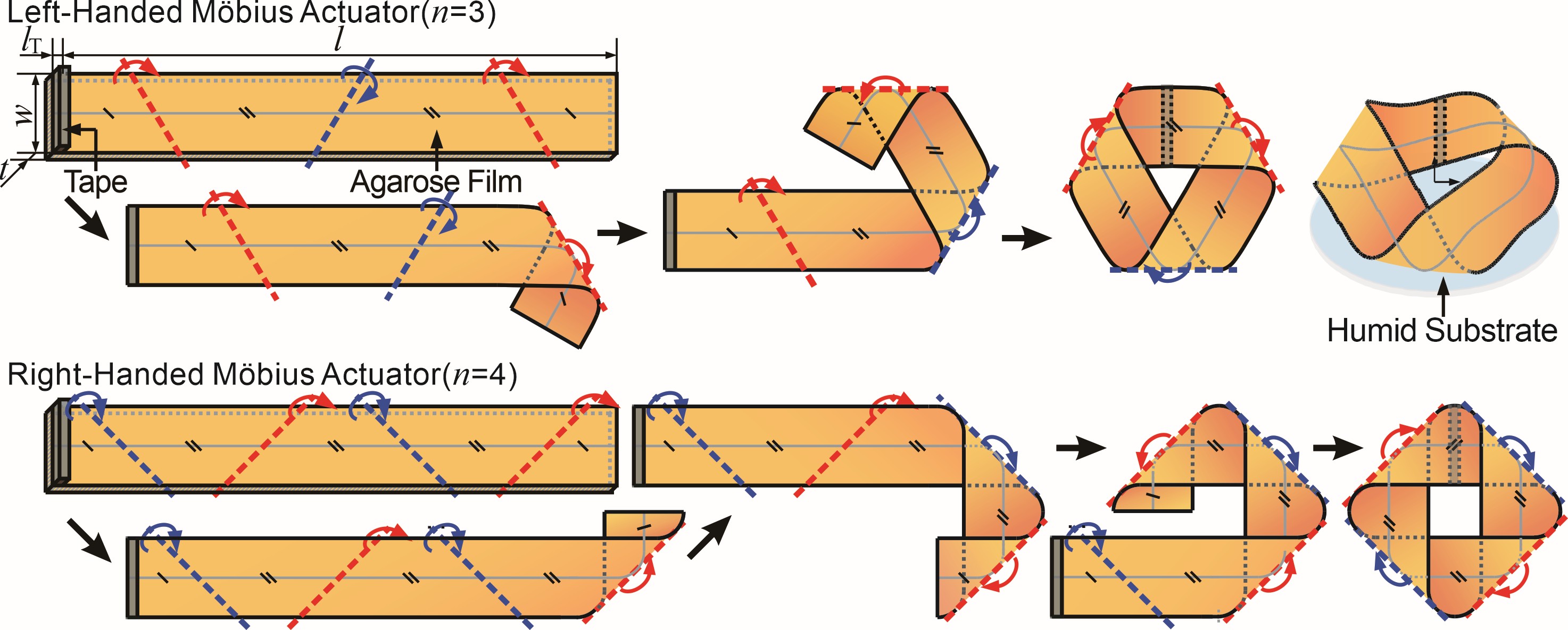
Xiaochen Yang#, Weiqiang Zhao#, Jiayao Ma#, Zhiming Hu, Xinmeng Liu, Lei Fu, Chuhan Xu, Jiuan Lv, Lei Zhang*, Yan Chen*. Threefold Möbius Machine. Advanced Functional Materials, 2025, 35(23), 202420815.
(https://doi.org/10.1002/adfm.202420815)
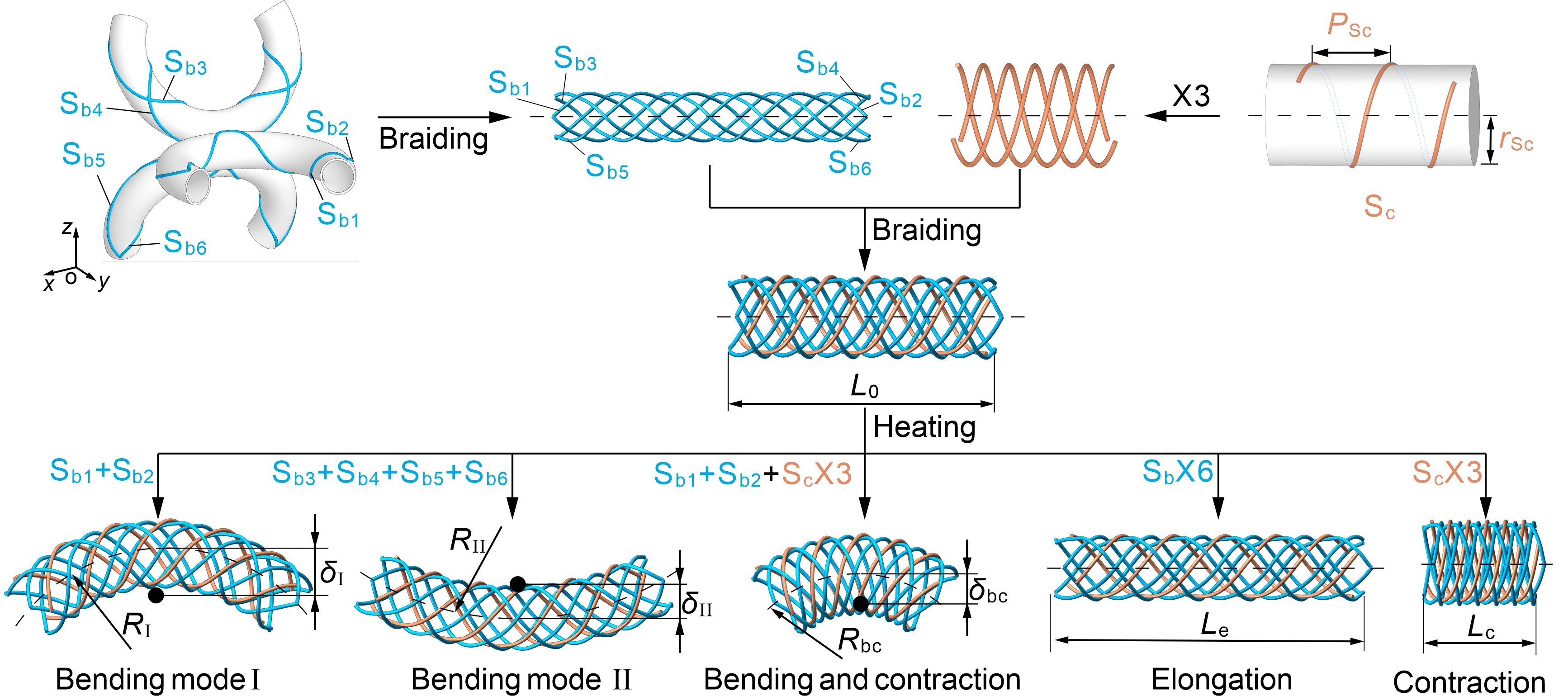
Zhenhao Jia#, Jiayao Ma*, Yan Chen*, A Multimode Soft Robot Based on a Single Braided Tube. Advanced Intelligent Systems, 2025, e202500777.
(http://doi.org/10.1002/aisy.202500777)