Yan Chen, Zhong You*. An extended Myard linkage and its derived 6R linkage. Trans. ASME. Journal of Mechanical Design, 2008, 130(5), 052301. (https://doi.org/10.1115/1.2885506)
Chaoyang Song, Yan Chen*. A family of mixed double-Goldberg 6R linkages. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2012, 468: 871–890. (https://doi.org/10.1098/rspa.2011.0345)
Zhong You and Yan Chen, Motion Structures: Deployable Structural Assemblies of Mechanisms, Taylor and Francis, ISBN: 978-0-415-55489-3, 2011. [PDF]
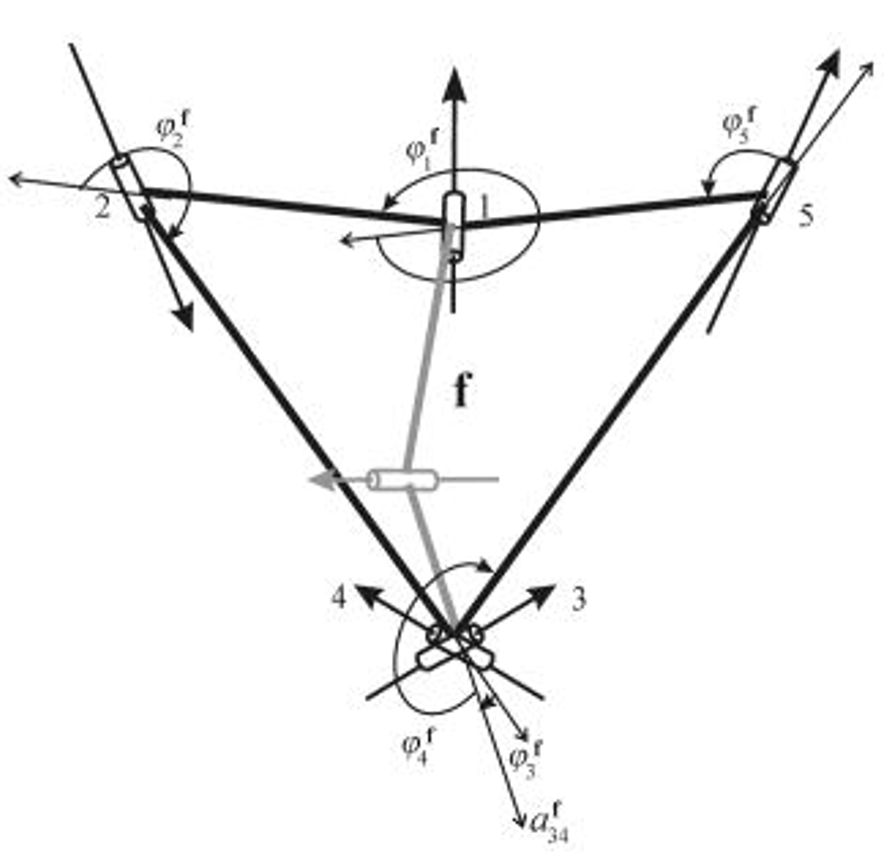
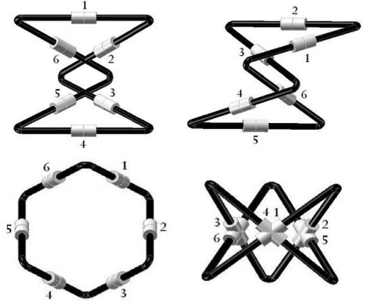
Yan Chen, Zhong You, Tarnai Tibor*. Threefold-symmetric Bricard linkages for deployable structures. International Journal of Solids and Structures, 2005, 42(8): 2287–2301. (https://doi.org/10.1016/j.ijsolstr.2004.09.014)
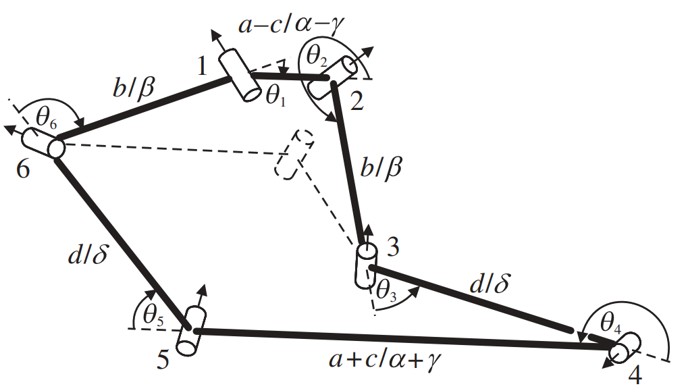
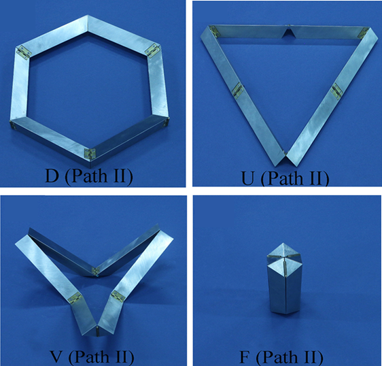
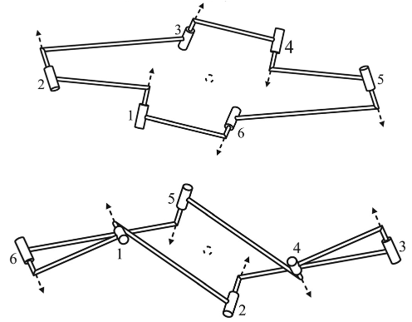
Fufu Yang, Zhong You, Yan Chen*. Foldable hexagonal structures based on threefold-symmetric Bricard linkage. Trans. ASME. Journal of Mechanisms and Robotics, 2020, 12(1): 011012. (https://doi.org/10.1115/1.4045039)
Chaoyang Song, Yan Chen*, I-Ming Chen. Kinematic study of the original and revised general line-symmetric Bricard 6R linkages. Trans. ASME. Journal of Mechanisms and Robotics, 2014, 6(3): 031002. (https://doi.org/10.1115/1.4026339)
Chaoyang Song, Yan Chen*, I-Ming Chen. A 6R linkage reconfigurable between the line-symmetric Bricard linkage and the Bennett linkage. Mechanism and Machine Theory, 2013, 70: 278–292. (https://doi.org/10.1016/j.mechmachtheory.2013.07.013)
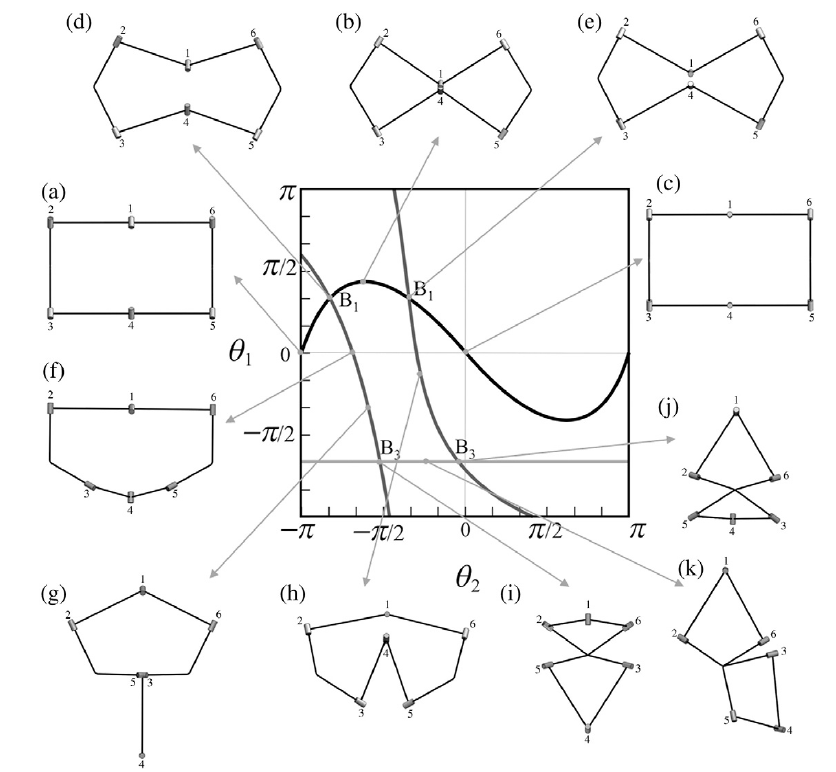
Huijuan Feng, Yan Chen*, Jian Sheng Dai, Grigore Gogu. Kinematic study of the general plane-symmetric Bricard linkage and its bifurcation variations. Mechanism and Machine Theory, 2017, 116: 89–104. (https://doi.org/10.1016/j.mechmachtheory.2017.05.019)
Chaoyang Song, Huijuan Feng, Yan Chen*, I-Ming Chen, Rongjie Kong. Reconfigurable mechanism generated from the network of Bennett linkages. Mechanism and Machine Theory, 2015, 88: 49–62. (https://doi.org/10.1016/j.mechmachtheory.2015.02.003)
Weiqi Liu, Yan Chen*. A double spherical 6R linkage with spatial crank-rocker characteristics inspired by kirigami. Mechanism and Machine Theory, 2020, 153: 103995. (https://doi.org/10.1016/j.mechmachtheory.2020.103995)
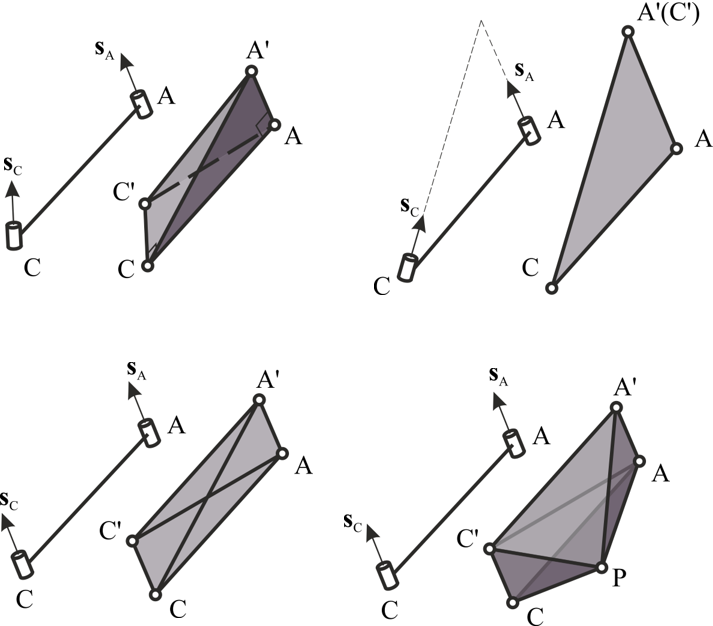
Fufu Yang, Yan Chen*, Kang R, Ma J. Truss transformation method to obtain the non-overconstrained forms of 3D overconstrained linkages. Mechanism and Machine Theory, 2016, 102: 149–166. (https://doi.org/10.1016/j.mechmachtheory.2016.04.005)