|
最新论文——由两个Bennett机构实现的可动组合机构及其在“立方八面体-正八面体”可展多面体中的应用
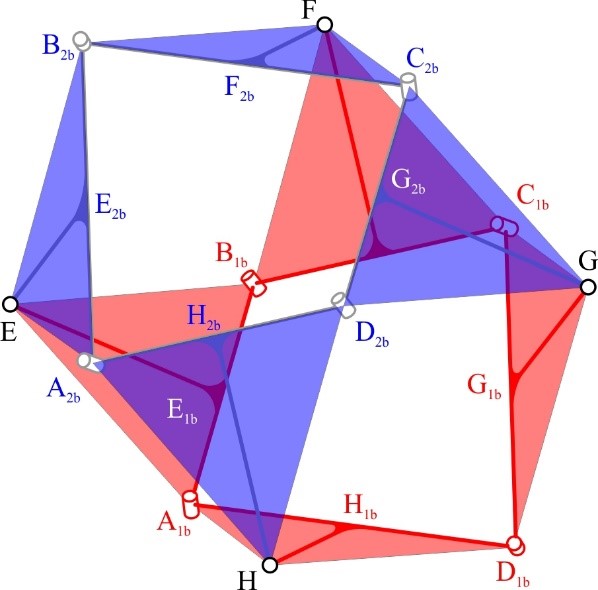
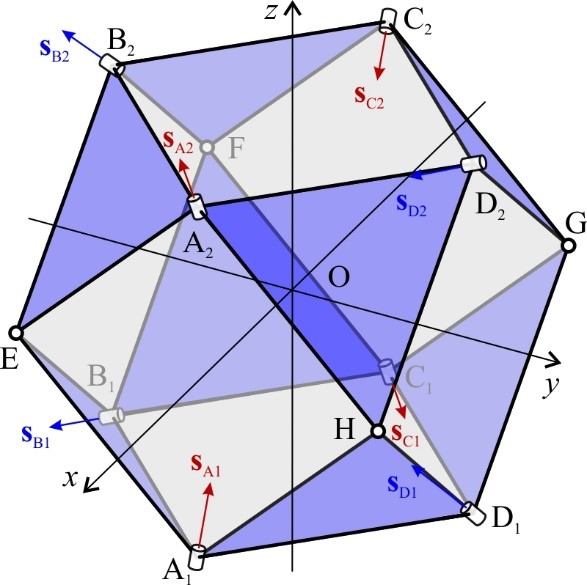
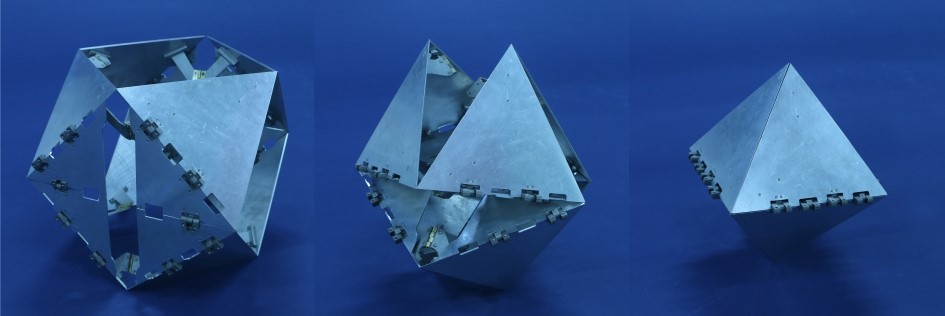
From: Date: 2020-01-02 空间过约束Bennett 4R机构由于具有最少杆数并能实现空间复杂运动规律,在可展结构领域得到广泛关注。为获得更大和更复杂形状的大型可展结构,就需要将多个Bennett 4R机构组装成单自由度网格。然而,基于Bennett机构的现有可展网格均采用平铺阵列的方式,无法实现三维立体结构的折展,即无法实现空间多面体的折叠与展开。 Bennett机构可动装配体 多面体机构 Bennett机构可动装配体 可展多面体物理模型 根据两个Bennett 4R机构之间的对称特点,推导出由四个球副构建单自由度可动Bennett组合机构的几何条件。随后,作者考虑利用该机构实现立方八面体与正八面体之间的单自由度变换。通过分析完全展开和完全折叠两个构型的几何特点,推导出Bennett 4R机构的各运动副方位。利用机构运动学和桁架变换方法,证明了该组合机构确实可实现上述两个多面体之间的变换,运动过程连续无分岔。通过制作物理模型,进一步验证了结果的有效性。
Fufu Yang, Zhong You, Yan Chen, 2020, Mobile Assembly of Two Bennett Linkages and Its Application to Transformation Between Cuboctahedron and Octahedron, Mechanism and Machine Theory 145, 103698. |