|
折纸螺旋结构的手性转化与层级手性传递
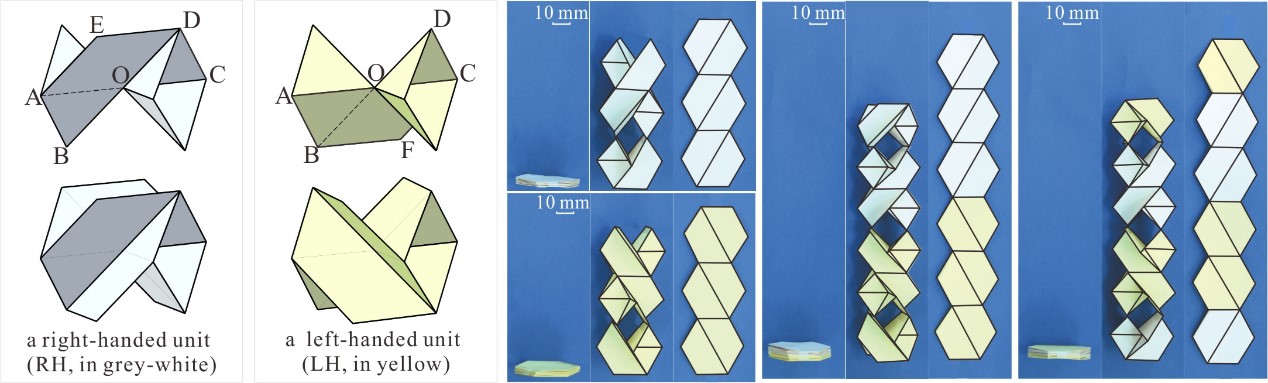
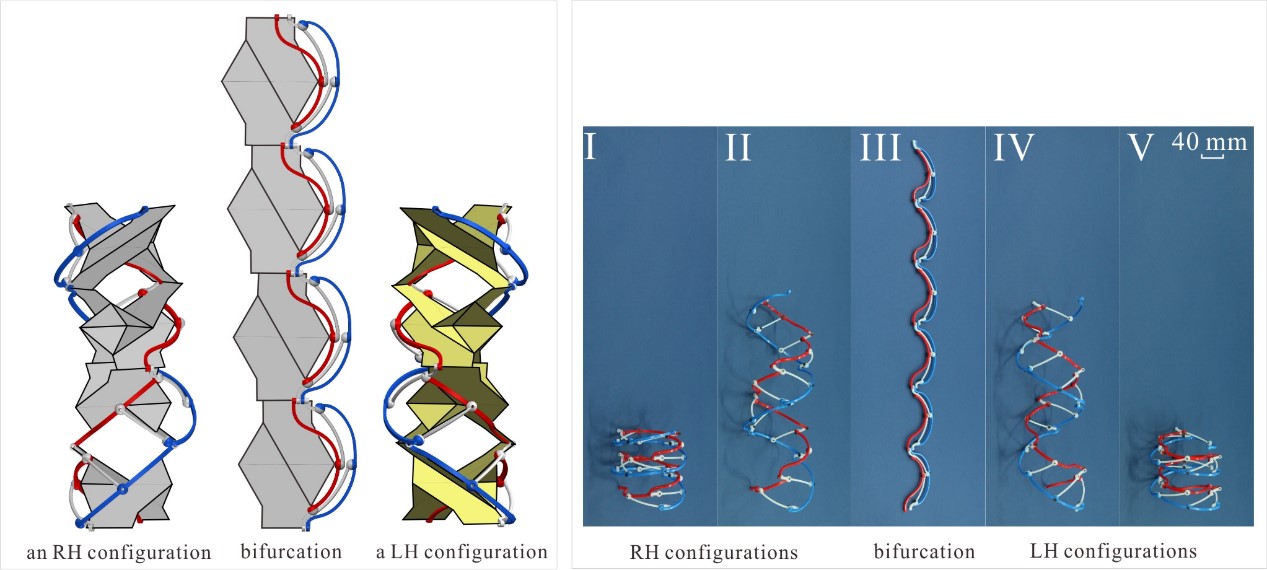
From: Date: 2020-05-15 2020年5月,天津大学陈焱教授课题组受折纸启发,设计了一种具有可调节手性的螺旋结构,通过机构运动分岔实现了该结构左右手性之间的相互转化,并通过改变基本组成单元间的连接方式,实现了该结构从基本单元到整体结构间的层级手性传递。相关研究成果以“Helical structures with switchable and hierarchical chirality”为题发表在期刊Applied Physics Letters上( https://doi.org/10.1063/5.0005336)。 图1 基于折纸的手性单元与螺旋结构 对于人造结构而言,其手性通常在设计中已经确定。由于左右手性结构的构造不同,要实现手性转换必须改变其构型。作者利用刚性折纸与连杆机构的运动学等效性,将具有手性的折纸螺旋结构转换为杆件结构(图2),通过机构运动分岔,实现了该螺旋结构左右手手性间的转化。 图2 不同手性间的转化 最后,作者通过改变手性单元间的连接方式,设计了一种具有层级手性的螺旋结构(图3)。该结构具有主次两条螺旋线,可实现手性从单元到整体结构之间的传递。进一步讨论了几何参数对该结构的螺旋特性及能量的影响。研究发现主次两条螺旋线虽然具有相同的手性,但其螺旋特性完全不同,使得该螺旋结构具有两个完全折叠构型。 图3 层级手性螺旋结构
未来展望:
|