|
最新论文——基于可重构机构模块的三维可编程超材料
From: Date: 2021-12-03 机械超材料是人工设计的新型复合材料或结构,由于特殊的底层结构和空间排布方式,表现出自然材料所不具备的非常规机械特性。通常,单一胞元是通过旋转、阵列或镜像等方式进行周期性的排布以实现超材料性能的预期设计。然而,由于单胞具有相同的变形模式,所设计的超材料往往调节范围和适应能力有限。利用结构的形状变形来实现系统可重构是实现大变形超材料的可编程性和可调控性的一种有效方法。其中,基于机构运动的超材料具有的可靠变形路径等特点,是可编程性和可调控性实现的关键,这引起了学者们的广泛关注,并在刚性折纸、剪纸和模块化超材料的设计中得到了巨大应用。但针对基于机构运动的超材料的现有研究,大多是仅具有单一变形路径的有限重构能力的系统,尽管人们已经努力去探索具有多个变形路径的基于机构运动的超材料,但得到的大多是需要相对复杂控制的多自由度系统。
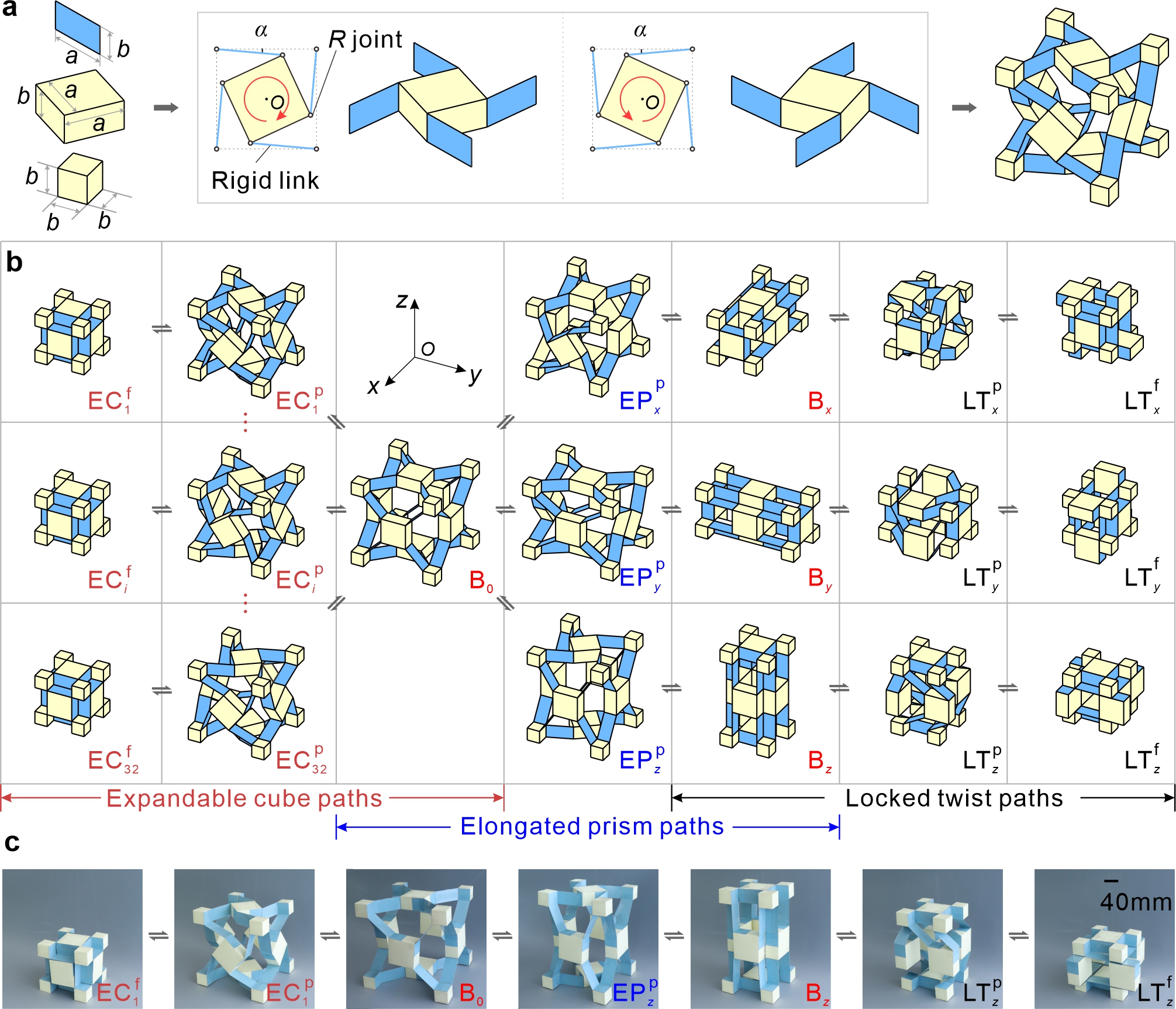
视频1 图1 模块的可重构性 图2 单一模块的机械性能 图3 具有(mz+nz)模块的柱状装配体的结构设计与性能编程 图4 3D超材料的结构设计与性能编程
Liu W, Jiang H, Chen Y, 3D Programmable Metamaterials Based on Reconfigurable Mechanism Modules, Advanced Functional Materials, 2021, 2109865. |