|
最新论文——一种具有连续机构运动和双稳态的三维模块化超结构
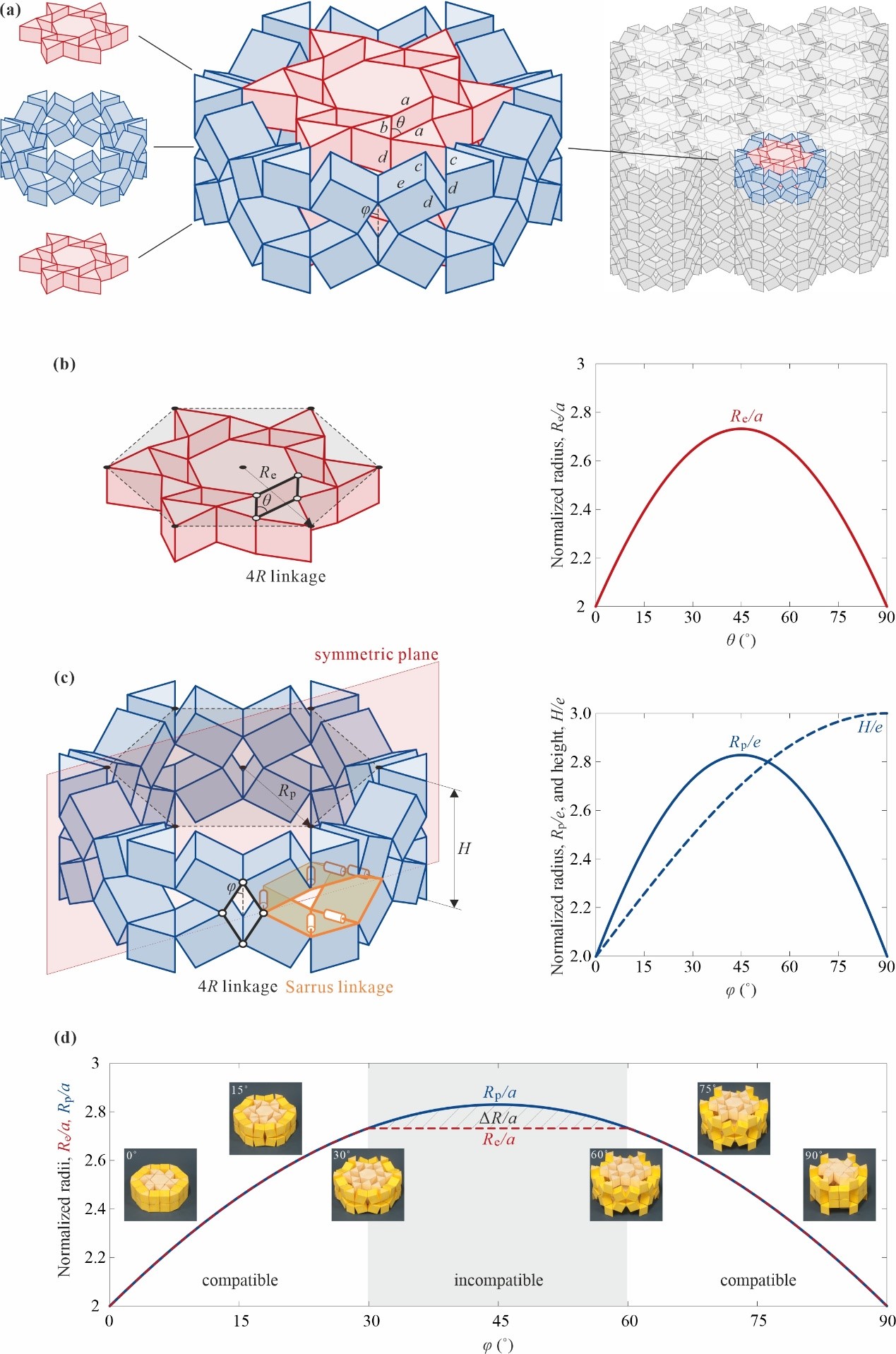
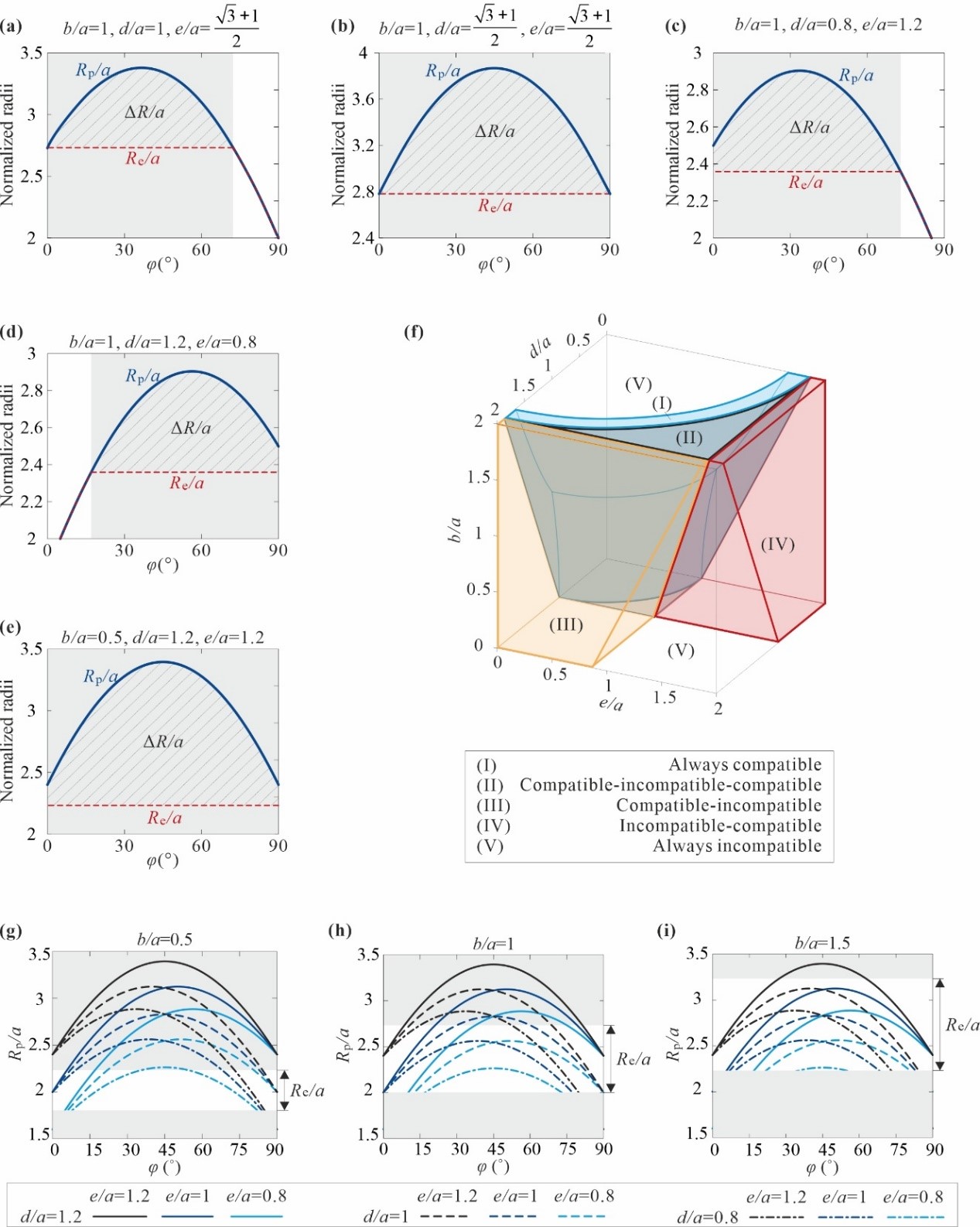
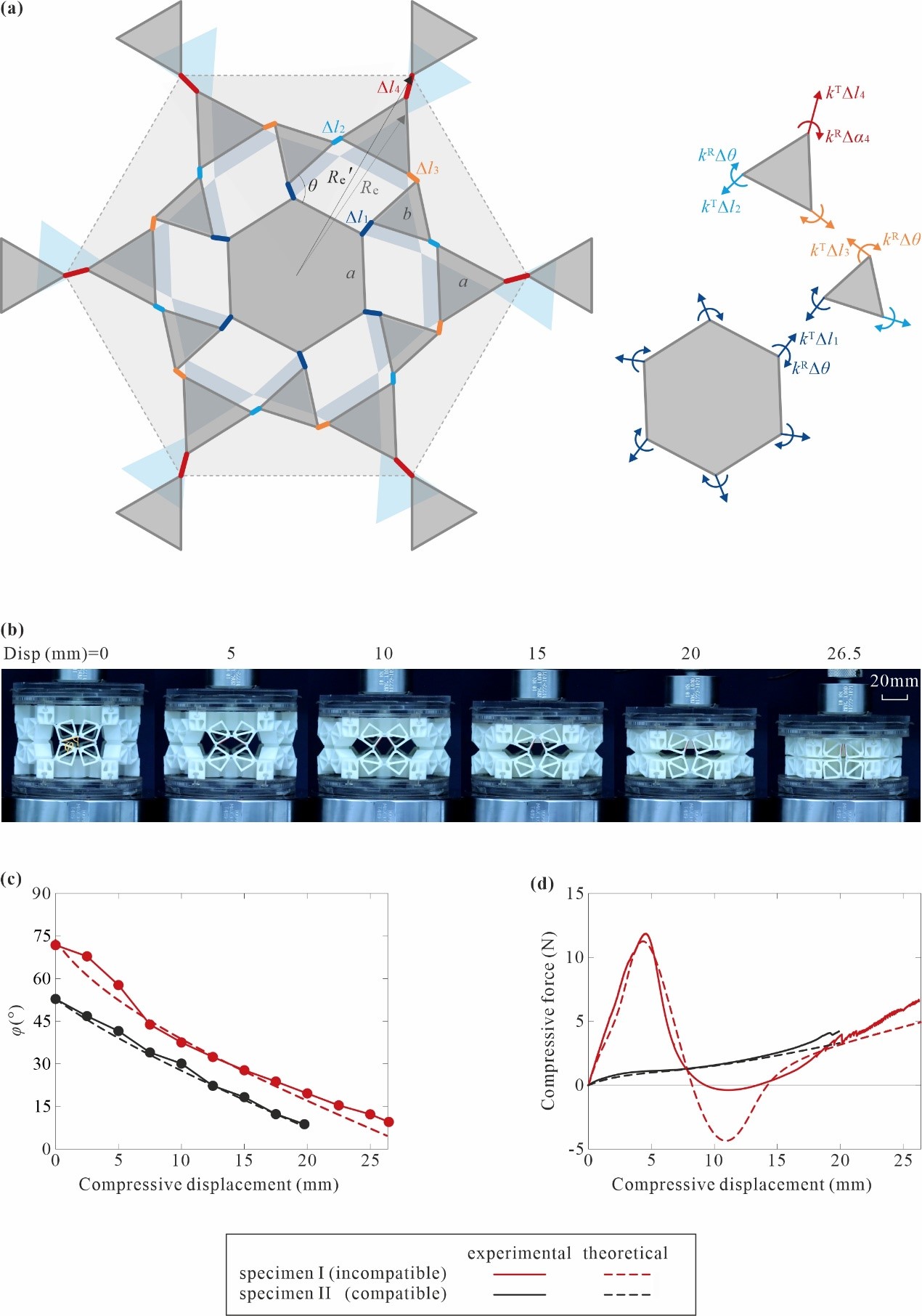
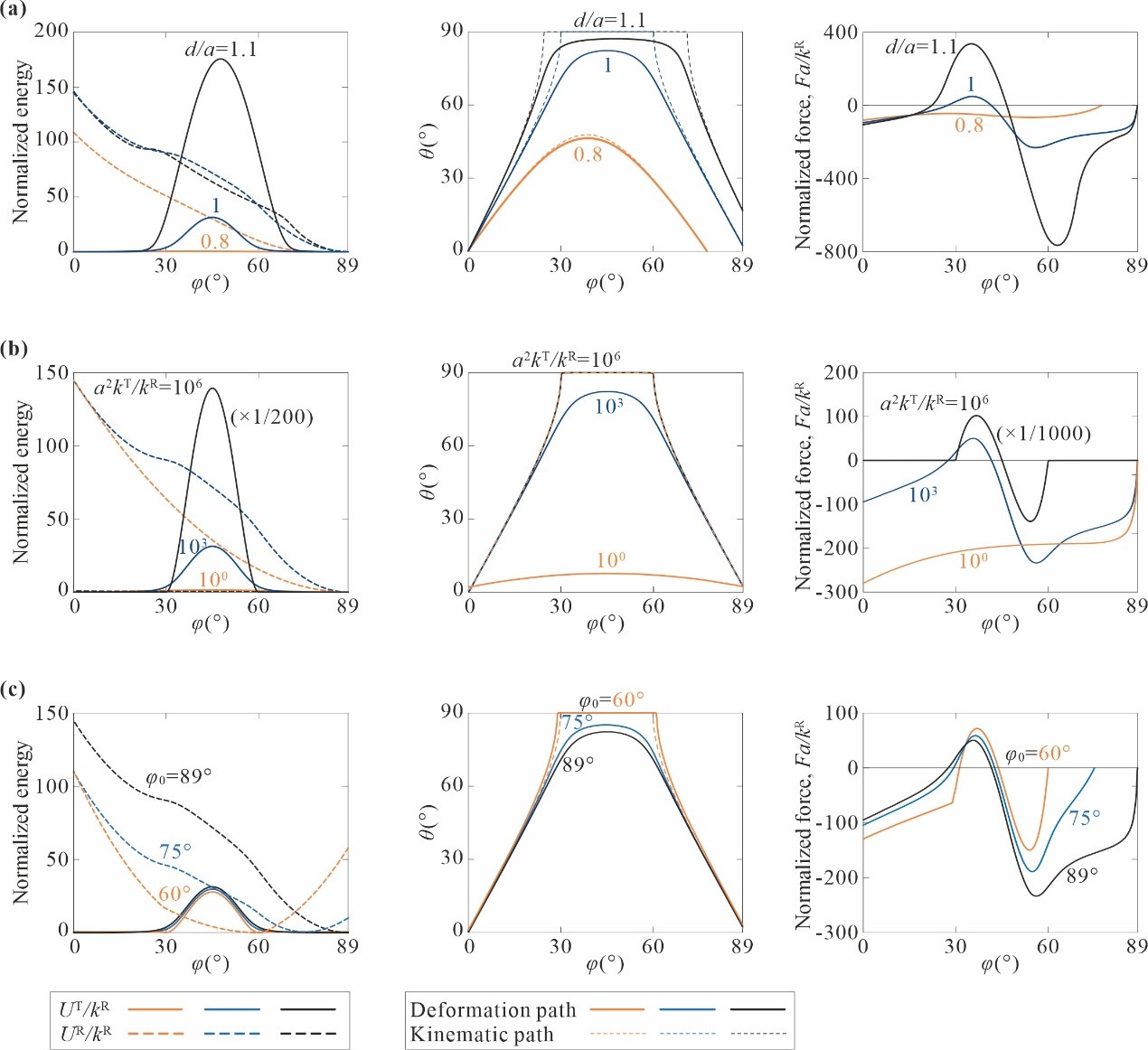
From: Date: 2022-04-02 双稳态或多稳态结构是一种特殊的工程结构,在连续载荷作用下,其能量曲线上有两个甚至更多谷值点,对应不同的稳定平衡构型,在自动驱动、形状重构、缓冲吸能等领域具有广泛的应用前景。传统双稳态结构的设计原理主要基于典型的双稳态结构组件,仅具有两个稳定构型,结构的变形幅度和刚度可调性都受到比较大的限制。 针对这一问题,天津大学陈焱教授团队将机构的设计策略引入多稳态结构研究中,创新性地提出了多稳态机构的概念,并设计了一种具有连续机构运动和双稳态的三维模块化超结构。新型超结构由上下底面(红色)和侧面(蓝色)两种单自由度机构构造而成。由于两种机构具有相同的径向折展运动模式和不同的运动范围,这使得整体超结构在变形过程中存在两个协调运动阶段和一个非协调运动阶段。在协调运动阶段,超结构可以视为理想机构,仅需铰链转动即可实现大变形,从而将稳态由一个点扩展到一个有限的变形范围;而在非协调运动阶段,超结构需要通过大结构变形克服其组成机构的几何不协调,因此变形能与刚度明显提高,从而产生双稳态特性。 图一 超结构的几何设计 首先构建了超结构的机构运动学模型,系统解析了几何设计参数对超结构的运动模式的影响。通过调控几何参数,实现了全程协调、协调-非协调-协调转换、协调-非协调转换、非协调-协调转换以及全程不协调五种运动模式,并得到了几何参数与超结构运动不协调程度的定量关系。 图二 超结构几何设计参数与运动不协调程度的关系 进一步,以能量最小原理为基础,建立了双稳态超结构的力学理论模型,具体解析了超结构的机构运动不协调导致结构双稳态行为与刚度突变的根本机理,并通过准静态压缩实验对理论模型进行了验证。 图三 超结构力学理论模型以及和实验结果的对比 基于理论模型,超结构的力学性质主要受几何设计参数、铰链拉伸与转动刚度比、零能量构型影响。由几何参数导致的运动不协调程度越高,铰链拉伸旋转刚度比越大,双稳态现象越明显。而零能量构型与运动协调-非协调转换点越接近,超结构变形路径越接近理想的机构运动路径。 图四 超结构几何设计参数、铰链拉伸与转动刚度比、零能量构型与其力学性能的关系 最后,作者还指出通过将设计参数不同的超结构进行空间排布,还能构造出具有可编程多稳态特性的超材料。该成果已于2021年12月20日在线发表于国际著名力学期刊Extreme Mechanics Letters,有望为后续新型多稳态机构以及多稳态超材料的设计开辟新的思路,并提供相应的理论基础。
Jiayao Ma#, Xiaoyi Jiang#, Yan Chen*, A 3D modular meta-structure with continuous mechanism motion and bistability, Extreme Mechanics Letters, Volume 51, 2022, 101584, ISSN 2352-4316. |