|
【最新论文】基于三重对称Bricard机构的三维可动结构
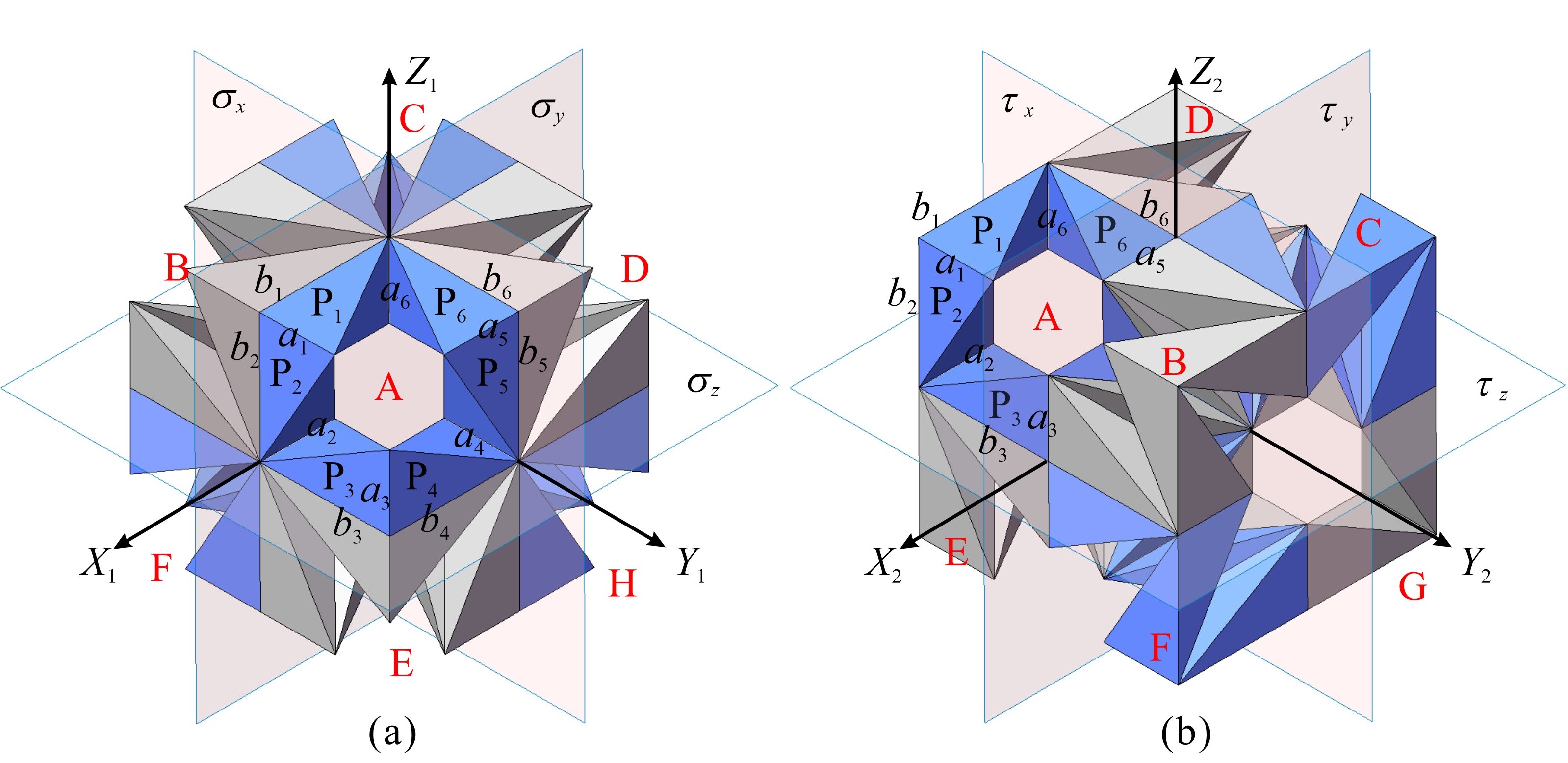
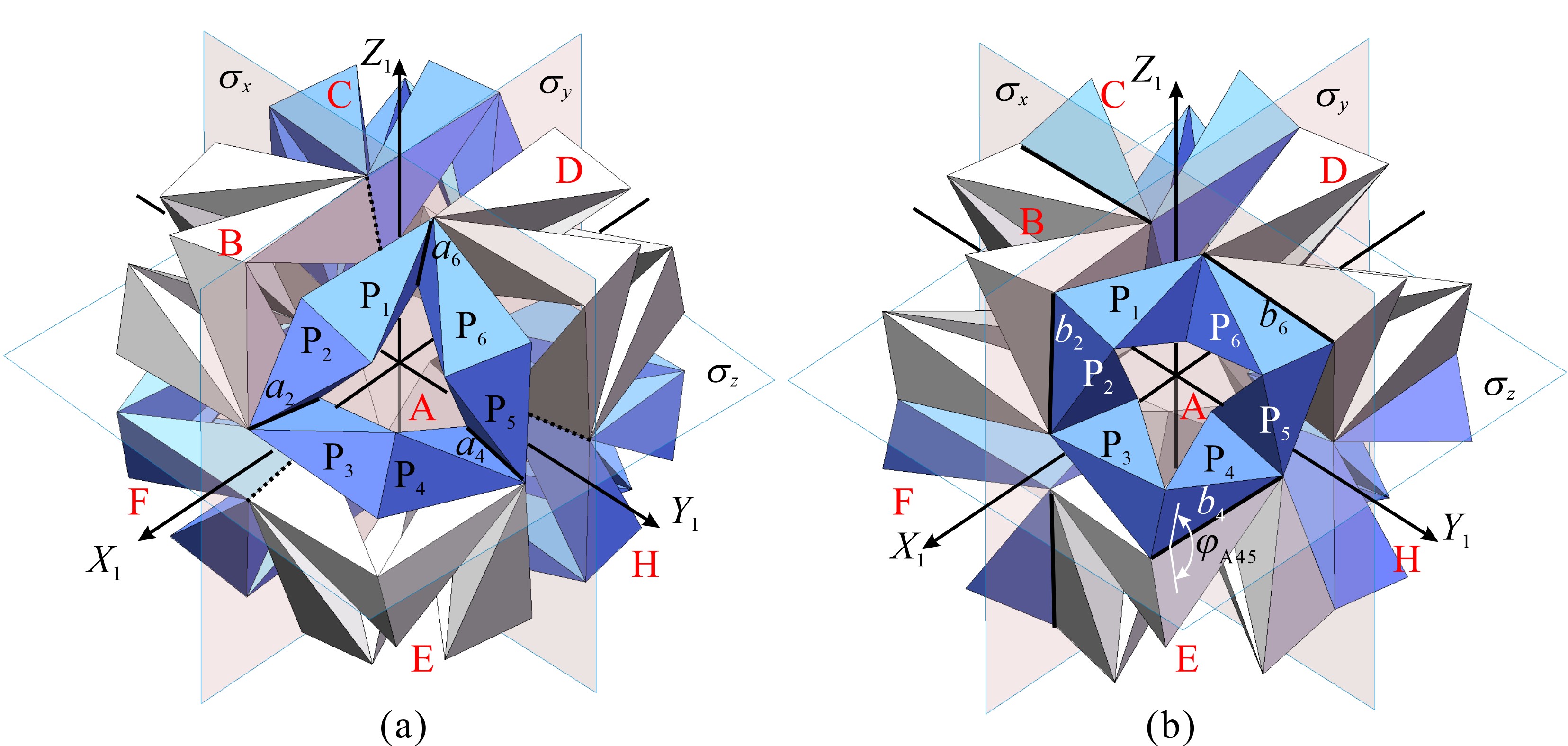
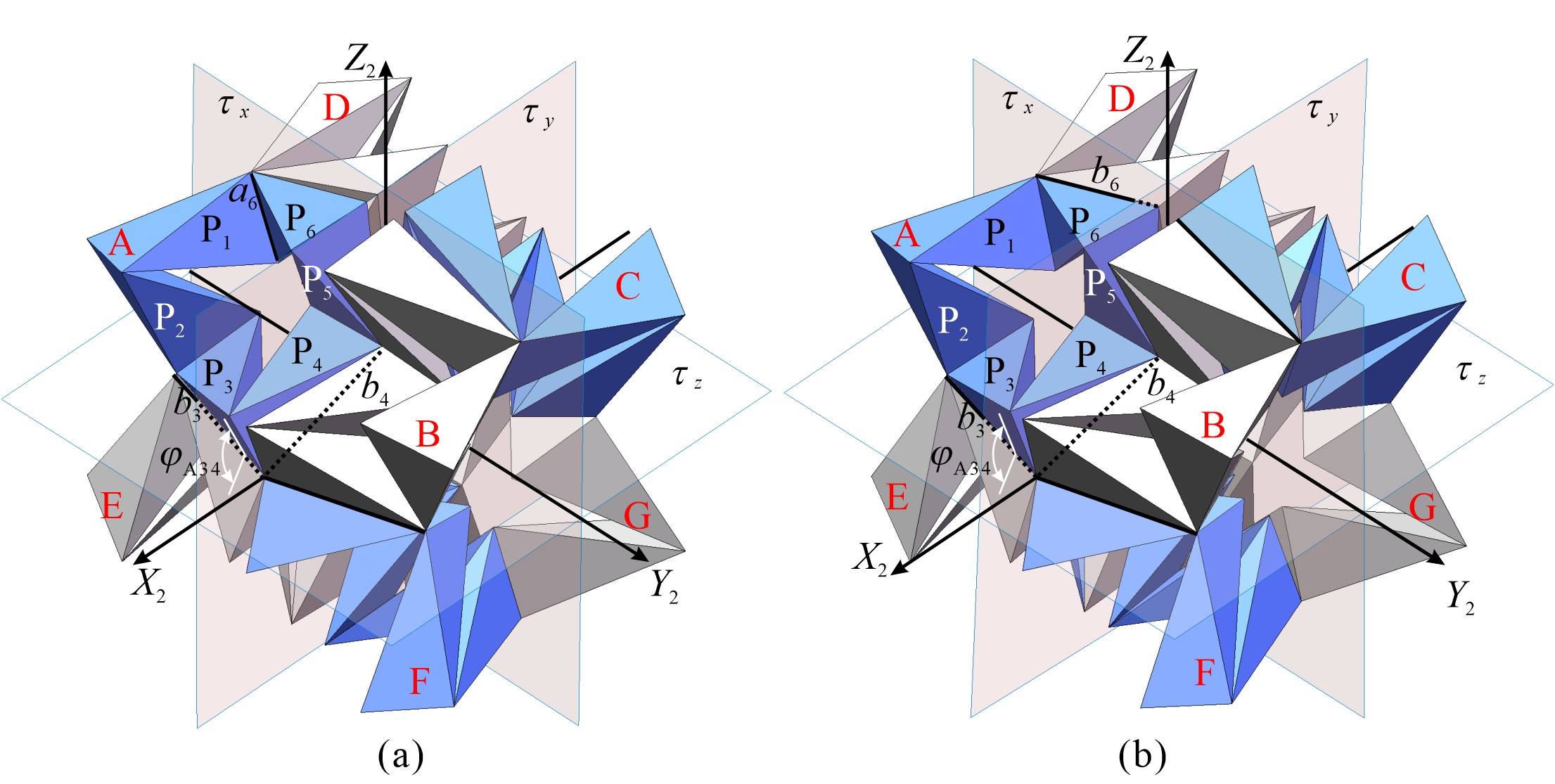
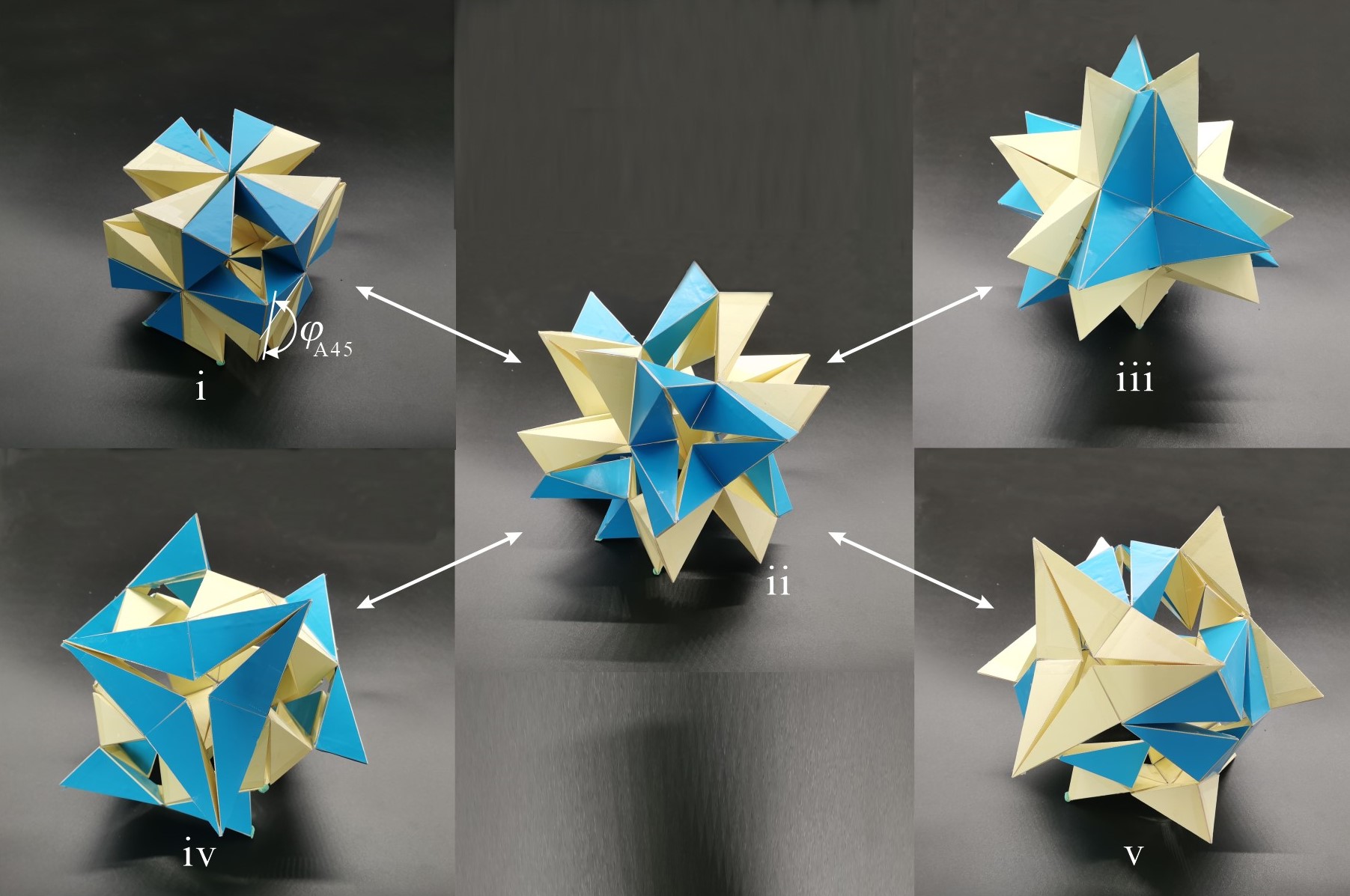
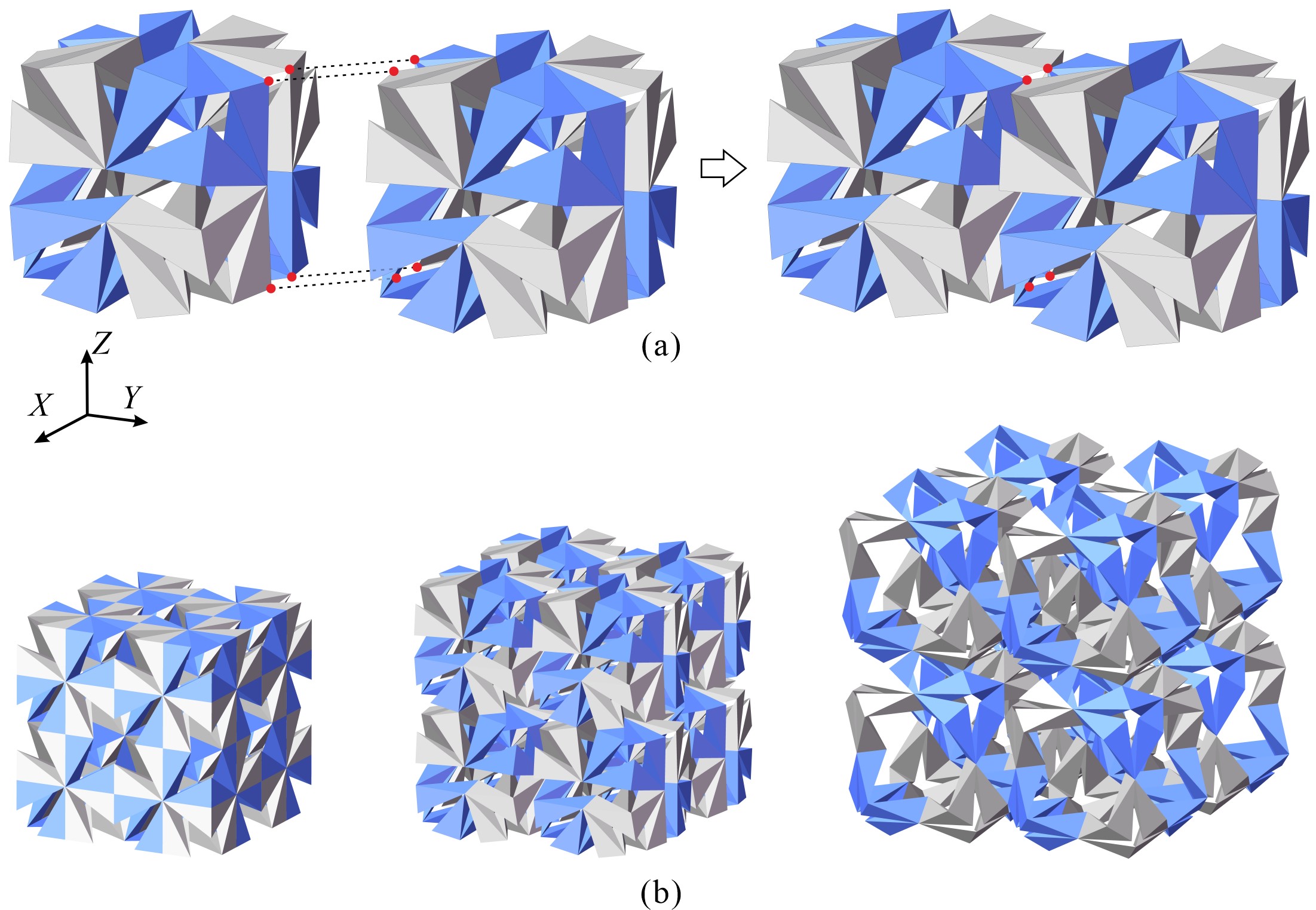
From: Date: 2023-05-03 单自由度空间过约束机构具有良好的折展特性,近年来被广泛应用于设计航天可展结构。为了满足不同的设计需求,可将空间过约束机构作为基本单元进行二维或三维的拓展构造大型可展结构。但目前大部分研究主要集中在基本单元的二维拓展方面,基于基本单元三维拓展形成的可展结构非常有限。 图1 八个Kaleidocycles机构单元的两种排布方式,(a)A1排布方式和(b)A2排布方式。 图2 八个Kaleidocycles机构单元按A1方式排布形成的两种可动结构(a)可动结构A1_1(b)可动结构A1_2 图3 八个Kaleidocycles机构单元按A2方式排布形成的两种可动结构(a)可动结构A2_1(b)可动结构A2_2 通过数值方法对上述四个可动结构进行运动分析知,A1_1和A1_2具有两条不同对称特性(立方体对称和四面体对称)的运动路径(图4和图5);A2_1和A2_2有一条运动路径,并在运动过程中保持立方对称特性。 图4 可动结构A1_1的运动过程 图5 可动结构A1_2的运动过程 上述可动结构可作为基本单元,通过球副连接两相邻单元,进一步组成三维可动结构,如图6所示由A1_1组成的可动结构,该结构可用于设计具有负泊松比特性的超材料。 图6 可动结构A1_1的三维可动组装 该成果发表在期刊Journal of Mechanisms and Robotics上。此研究基于八个特殊三重对称Bricard机构,按照两种空间对称排列方式,通过共用铰链组成了四种可动结构,通过运动分析发现其中两种可动结构具有运动分岔特性。该设计过程有助于在对称条件下创造新型三维可动结构。
Zhang X, Zhou X, Li M*, Liu T, Xing J, Lv W, Yang F, Chen Y. Three-dimensional mobile assemblies based on threefold-symmetric Bricard linkages. Journal of Mechanisms and Robotics, 2023, 16(1): 014502. |