|
清华大学李曙光老师访问天津大学可动结构实验室
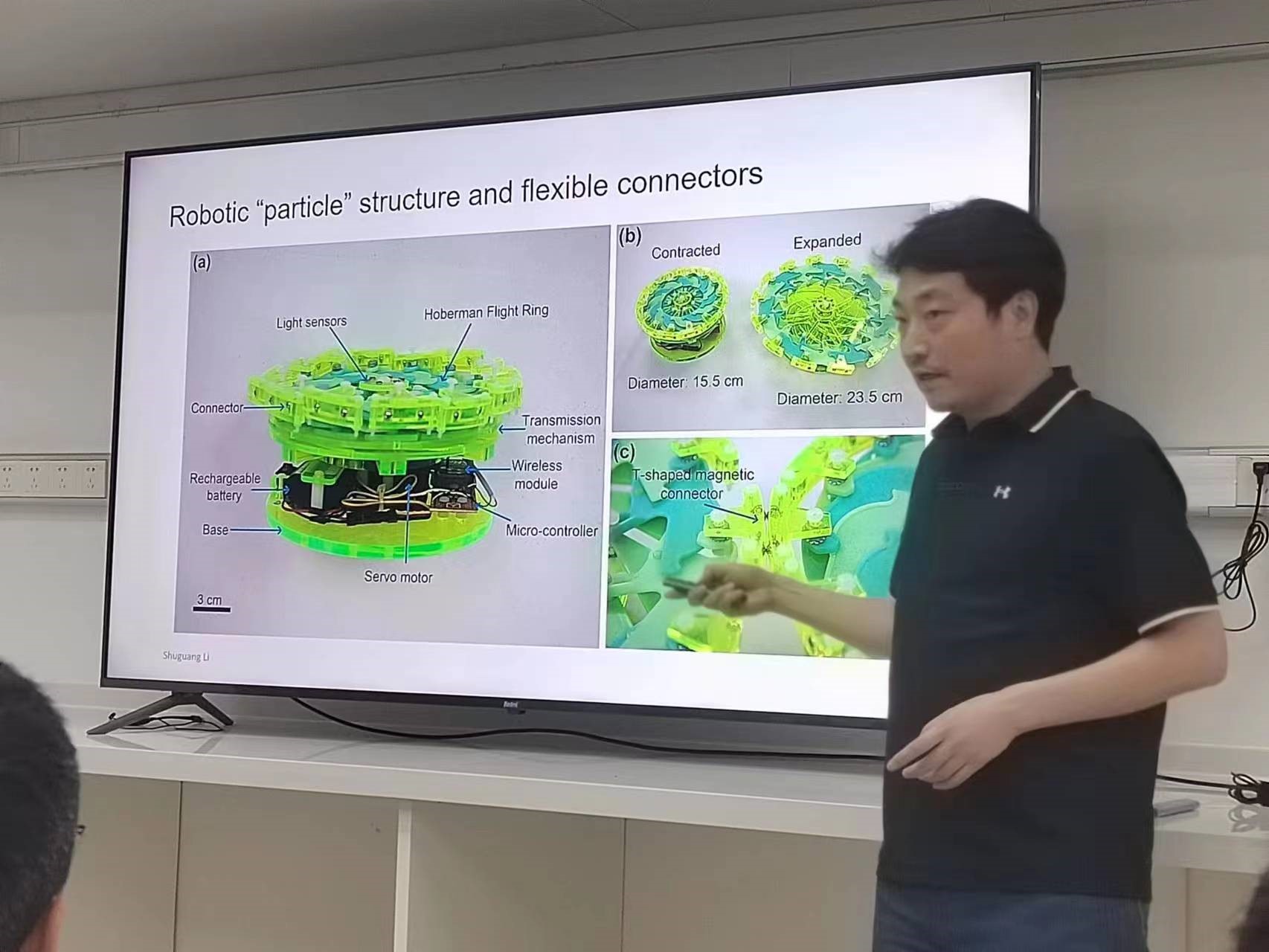
From: Date: 2023-05-22 2023年5月19日,应陈焱教授邀请,清华大学李曙光老师来访天津大学可动结构实验室,并为实验室全体师生做了一场充满趣味的学术报告——《可重构和可变形机器人》。 首先,李老师介绍了受生物细胞启发的“粒子机器人”系统。相较于传统的机器人,该系统具有类似于自然界的鲁棒性和适应性。通过协作,机器“粒子”们能够模仿生物或细胞执行各种高级集群行为和功能,例如定向迁移、躲避障碍和搬运物体等。
随后,李老师介绍了一种新颖的多功能变形机器人。通过穿戴不同的折纸外骨骼,机器人可以通过磁铁控制在各种功能之间快速切换,包括行走、滚动、航行和滑翔。
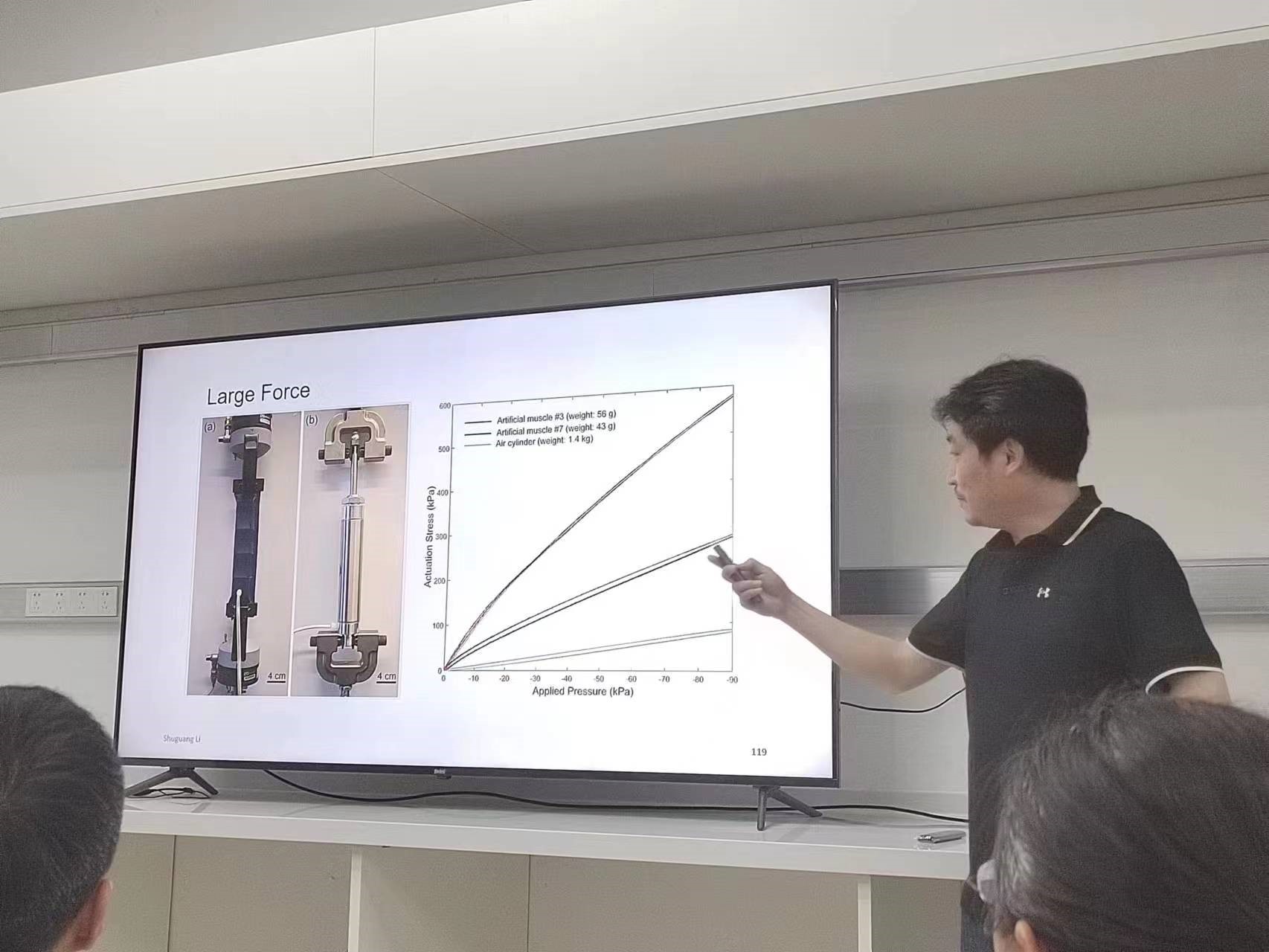
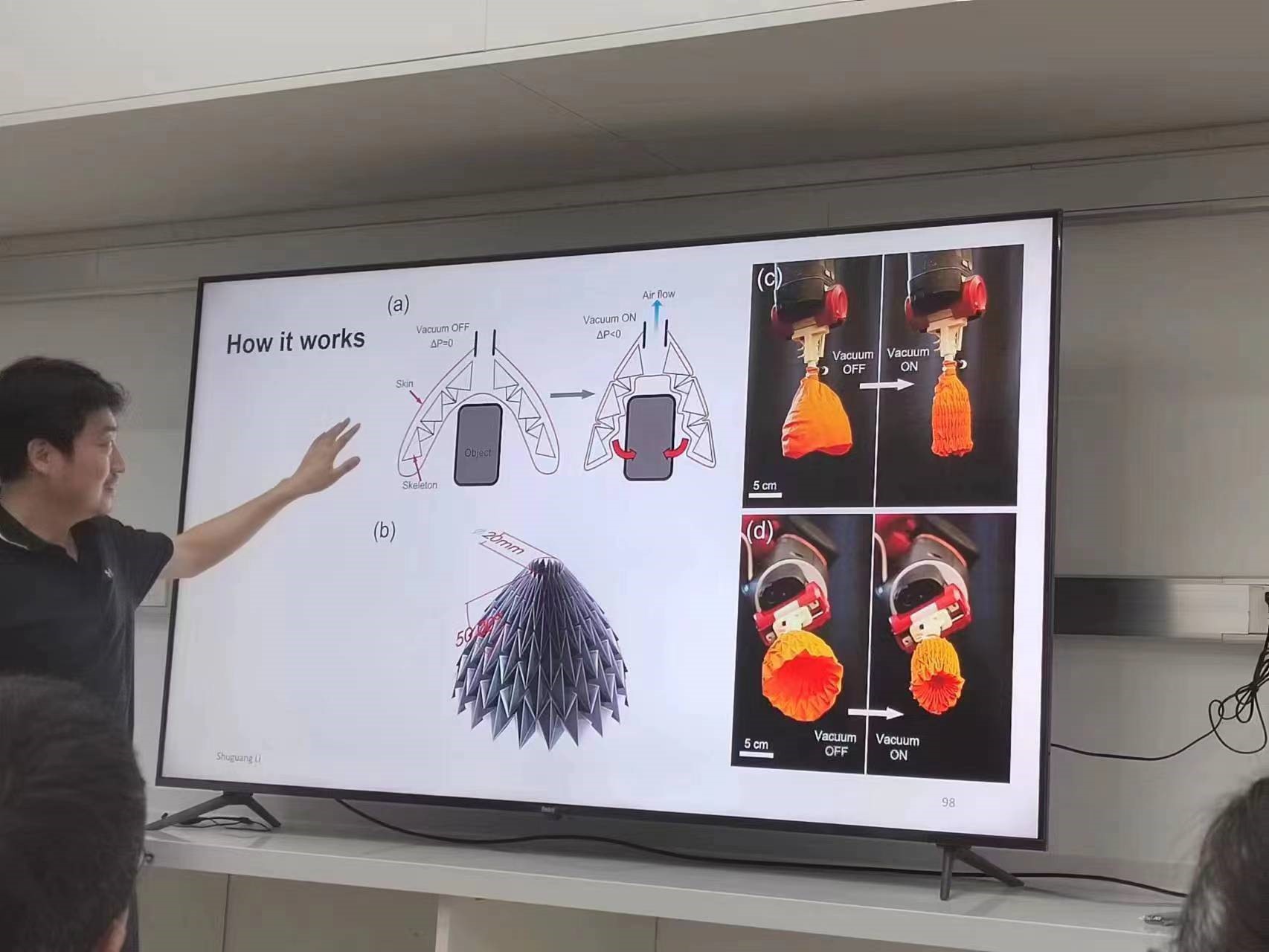
最后,李老师介绍了折纸启发的人工肌肉和折纸“魔球”抓取器。人工肌肉仅用空气或水压就能举起重达自身重量1000倍的物体。将人工肌肉安装在一个硬质的缸体内,可以产生数倍于传统活塞的巨大的驱动力,且没有摩擦损耗,能量转换效率大幅度提高。折纸“魔球”抓取器是一种由折纸“魔球”骨架和柔性薄膜组成的新型夹持器,具有足够的鲁棒性和较大的抓取力,能够抓取多种不同的物体。 李老师现于清华大学机械工程系任职副教授。目前的研究方向包括集群机器人、折纸/折叠机器人、软体机器人,以及类生命机器人,特别是基于AI辅助的机器人自动设计、自组装、自组织和自适应技术。近年来多篇论文发表在Nature、PNAS、Nature Communications等顶级期刊。 |