|
最新论文——基于机构运动学的可编程恒定泊松比三维超材料
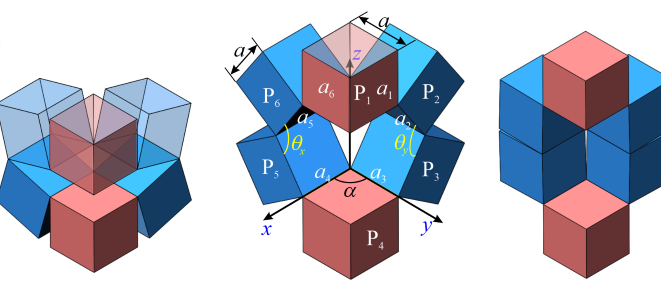
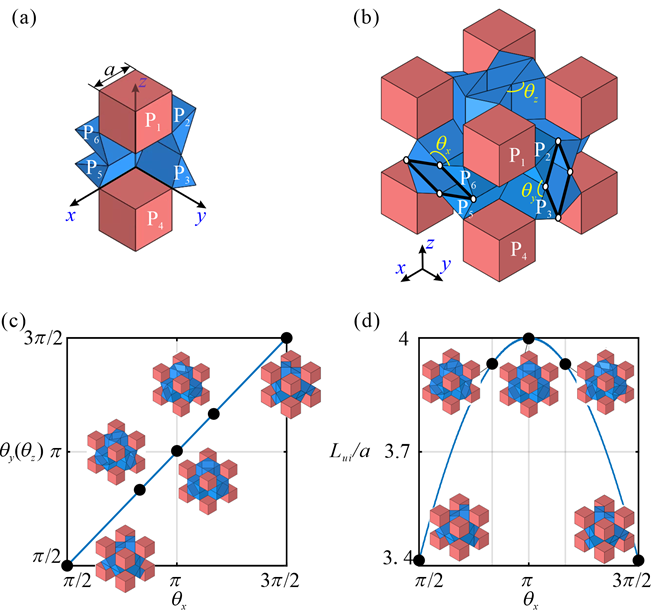
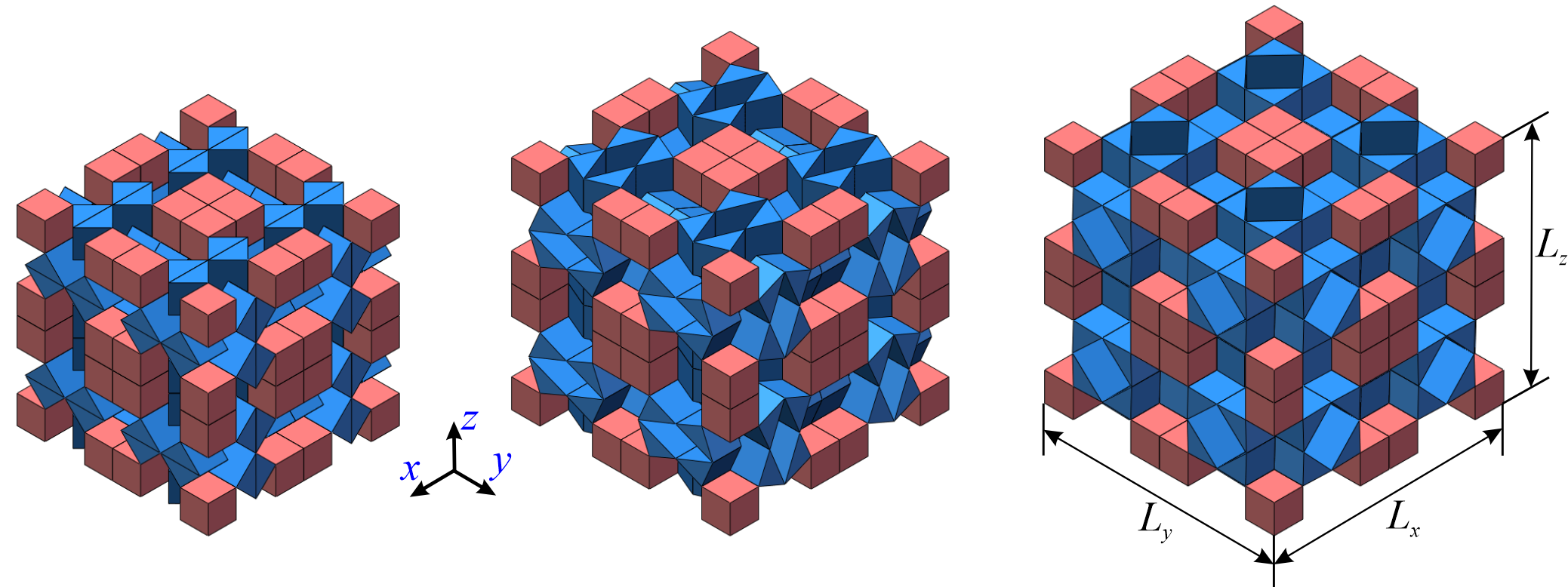
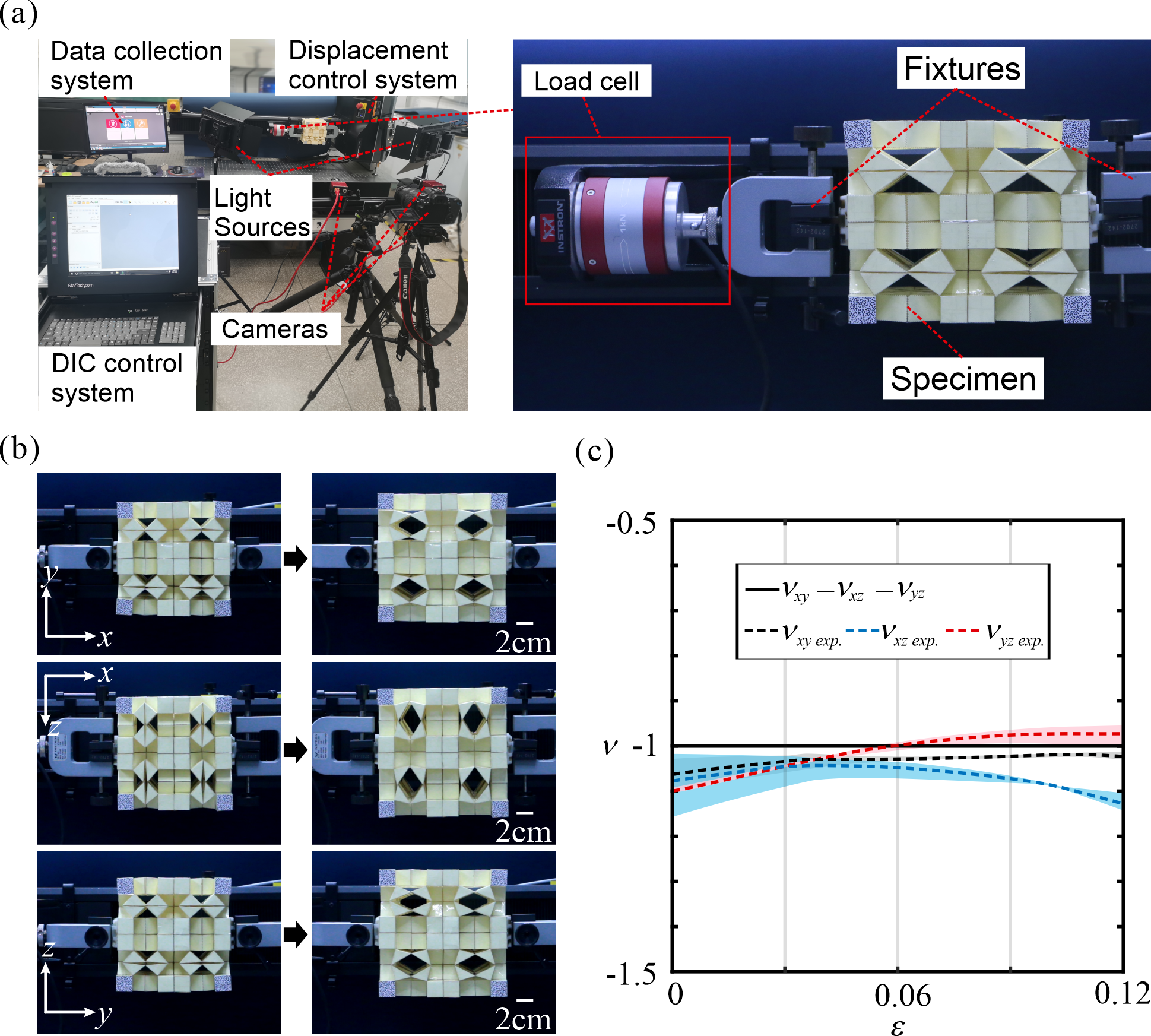
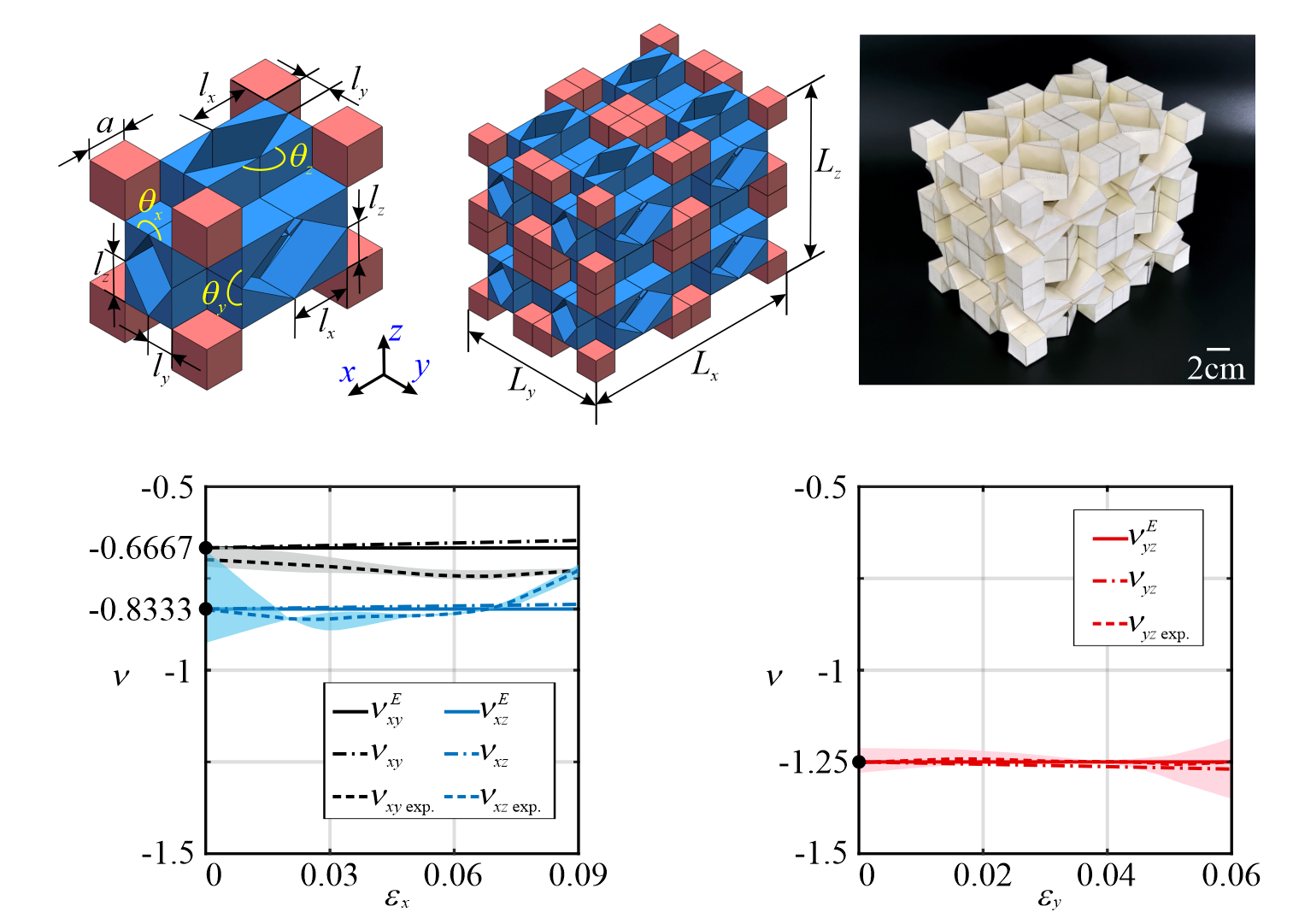
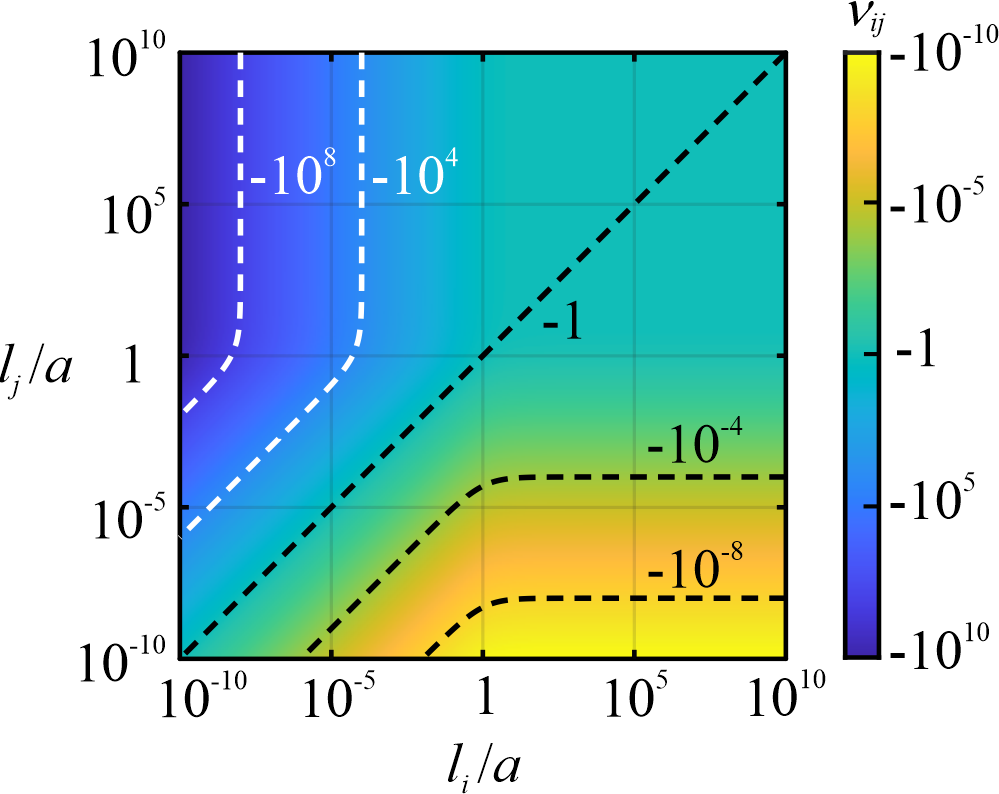
From: Date: 2023-09-22 超材料往往由胞元通过周期性拓展组合构成,并具有特殊的性能。大部分机械超材料所具有的力学性能都基于胞元的结构大变形,而这些变形在单元之间的传递和同步性较差,致使设计和控制超材料的力学性能比较困难。 图1 基于Sarrus机构的六立方体运动学超材料的基本单元。 图2正交型运动学超材料的构造。(a) 蓝色立方体切割一半后的修正单元;(b) 由四个单元组成且上下表面为三棱柱的正交型运动学胞元;(c) 正交型运动学胞元的变形路径和典型状态;(d)胞元在运动过程中的尺寸变化。 将八个运动学胞元通过共面方式在空间中排布组成2×2×2胞元超材料,如图3所示。通过理论计算与如图4所示的实验验证,发现该超材料具有恒定-1泊松比。 图3 胞元在三个正交方向上排布而成的一种2×2×2胞元超材料。 图4 超材料的实验过程与泊松比结果。 之后,作者建立了运动胞元中三棱柱几何尺寸(lx, ly, lz) 与超材料泊松比间的解析关系,通过改变几何尺寸,分别计算超材料结构的理论泊松比和工程泊松比,对比发现两者近似恒定相等。作者通过设计尺寸为lx = 3a/2, ly = 2a/3, lz = a的超材料,并通过实验测试,发现其在三个正交方向上具有不同的恒定工程泊松比,且工程泊松比与理论泊松比及实验结果近似相等,如图5所示。 图5 具有各项异性恒定负泊松比的超材料。 进一步,通过在(0,+∞)范围内改变胞元三棱柱的几何尺寸,发现该型超材料各方向可以实现泊松比在(-∞,0)范围的编程,如图6所示。 图6 超材料泊松比与胞元几何尺寸li/a 和 lj/a(i, j = x, y, z 且 i ≠ j)的关系。 该成果发表在期刊Materials & Design上。此研究提出了一种基于机构运动学的可编程超材料构建新方法,有利于设计新型可编程超材料。
Yang Y#, Zhang X#, Maiolino P, Chen Y*, You Z*. Linkage-based three-dimensional kinematic metamaterials with programmable constant Poisson’s ratio. Materials & Design, 2023, 233, 112249. |