|
爱丁堡大学Marcelo Diaz教授和北京航空航天大学文力教授访问天津大学可动结构实验室
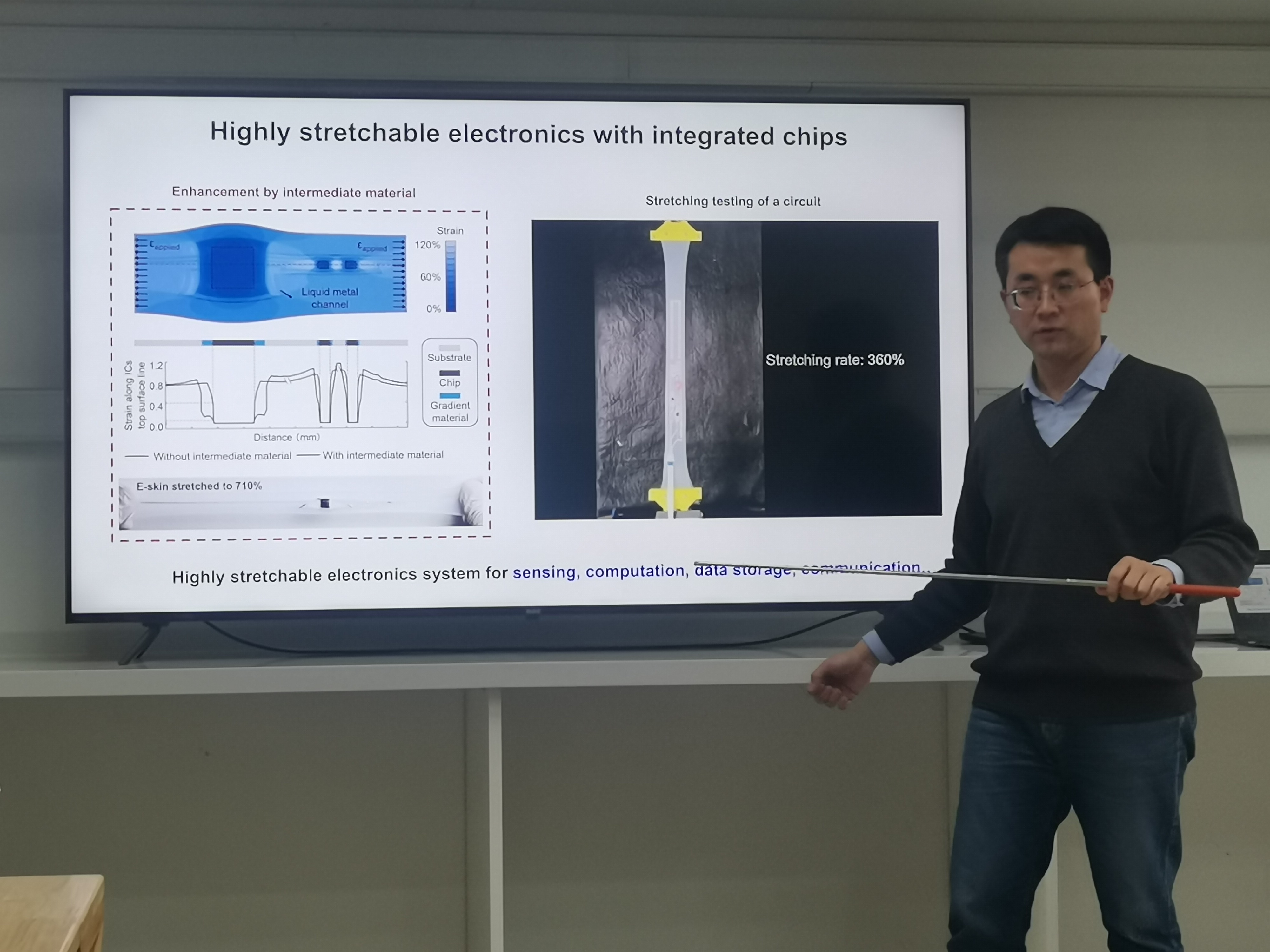
From: Date: 2023-12-07 2023年12月7日,应陈焱教授邀请,来自英国爱丁堡大学的Marcelo Diaz教授和来自北京航空航天大学的文力教授访问了天津大学可动结构实验室。 Marcelo Diaz教授为大家带来了题为“On the mechanics of kirigami structures”的精彩报告。剪纸作为一种古老的艺术形式,提供了可定制变形模式和力学响应的设计方法,并可应用于可重构结构(如大型可展结构)和微型结构(可拉伸电子器件)的设计。对薄弹性片的剪裁会导致结构具有来自局部平面外屈曲的宏观非线性响应。在本次报告中,Diaz教授首先分析了剪纸设计中最基本单元——单切口薄片的变形,来讨论剪纸构件的局部效应。基于此,讨论了剪纸薄片与液体基质的相互作用,研究了液体基质对剪纸结构局部稳态的影响。研究表明,后屈曲构型显示出两种类型的相变,即反对称后屈曲构型的一阶连续相变(二阶)和对称后屈曲构型的不连续相变(一阶),后者能够引起剪纸结构中的相位传播。 文力教授为大家带来了题为“Octopus-inspired soft robots for environmental interaction”的精彩报告。文力教授团队从章鱼特有的类似弯曲波的触手扫掠抓取模式中获得灵感,实现了一种软体仿章鱼机械臂,能够完成二维和三维空间中大范围运动、感知、抓握以及交互。 软体机械臂远端集成了可拉伸的液态金属电路,能够在高度变形的状态下处理传感信号。夹持器同时集成了智能吸附材料,可通过加热调节材料刚度,提高吸盘与抓取物的贴合程度,从而大大提高吸附力。在控制方面,通过开发可穿戴指套与无线通信,实现了远程感知和交互控制。除此之外,文力教授还介绍了一种软体机器人非接触控制方法,通过交互界面与人手之间的静电感应,在不接触机器人的条件下,实现软体机器人的交互示教。 报告期间,Marcelo Diaz教授和文力教授回答了大家提出的问题,进一步加深了同学们的理解,为同学们未来的研究提供了更新的视野和更广阔的思路。 |