|
最新论文——折纸启发的可重构多稳态变形结构
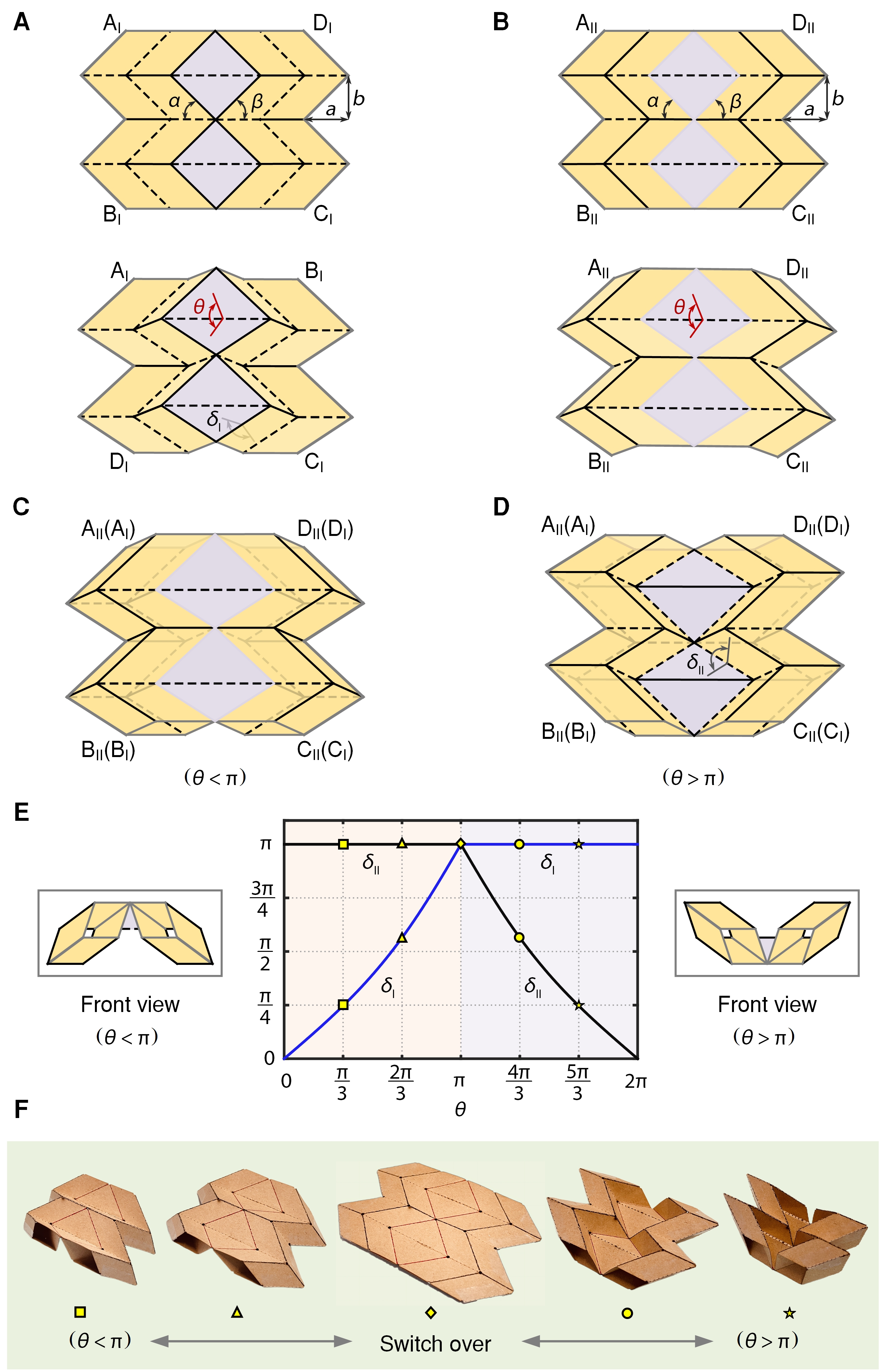
From: Date: 2024-05-30 导读 多稳态变形结构在实现几何构型变换和力学特性重构方面具有独特的优势,在机器人、超材料和空天变构型结构等领域展现出广阔的应用前景。目前,折纸启发的多稳态变形结构已经受到广泛的关注,但多数为非刚性折纸结构,变形过程中折痕和板面位置会同时产生形变,这使其稳态特性高度依赖于结构材料属性,限制了结构构型变换和功能重构能力。 英国牛津大学ZHONG YOU教授团队、哈尔滨工业大学邓宗全院士空天折展与变形机构团队、天津大学陈焱教授可动结构实验室联合开展研究,从刚性折纸结构运动学出发,提出了一种稳态特性可编程的可重构多稳态变形结构,消除了板面材料形变对结构重构运动的影响,并通过模块化扩展探究了此类结构在机器人和超材料领域的应用。该成果于2024年5月29日在线发表于国际权威期刊《科学-进展》(Science Advances)。论文共同通讯作者为哈尔滨工业大学郭宏伟教授、英国牛津大学ZHONG YOU教授,第一作者是毕业于哈尔滨工业大学、现为天津大学陈焱教授团队的博士后王春龙。 研究人员首先从四、六折痕折纸机构出发,引入折痕激活与休眠机制,设计了一种刚性可重构折纸结构。该折纸结构由上下两层折纸单元组合构建,利用中心菱形板面折痕的交替激活与休眠,实现了几何构型的可控重构。运动学分析表明该折纸结构只具有一个自由度,展平构型为其运动分岔点。接着,研究人员将折纸结构折痕变形模式等效为线性扭转弹簧,根据不同初始形态折纸单元运动全过程的势能变化规律,提出了一种双层组合式双稳态折纸结构设计方法,并得到了结构稳态特性与基本单元初始形态参数间的调控关系。 图1 基于折痕激活与休眠机制的刚性可重构折纸结构 研究人员采用3D打印覆膜技术制造了多个不同初始形态的软胶基本折纸结构单元,并将0.4mm厚的碳纤维薄板粘贴在板面位置以获得近似刚性。为了消除材料厚度产生的运动干涉,研究人员去除了折纸单元中心菱形板面对角线位置的折痕材料,研制了3种具有不同稳态角度的双稳态折纸结构物理样机,并通过三维几何扫描与力学实验,验证了双稳态设计和调控方法的正确性。 图 2 双稳态折纸结构样机研制和实验验证 利用双稳态折纸结构的模块化可扩展性,研究人员设计了一种可重构多稳态折纸结构骨架式机械操作臂。该机械操作臂采用负压气体控制折纸骨架的收拢与展开,利用形状记忆合金薄片驱动折纸骨架稳态构型的跳转重构,可实现8种空间构型的自由切换。研究人员利用⊖-⊕-⊕机械臂构型完成重物提升,利用⊕-⊕-⊕机械臂构型实现乒乓球、魔方、金属瓶等多种物体的稳定抓取。 图 3 可重构多稳态折纸结构机械操作臂
视频1 多稳态机械操作臂变构型抓取物体 随着双稳态折纸结构模块数量的增加,研究人员对此类多稳态折纸结构在可编程超材料领域的应用进行了探索。以3行7列多稳态折纸结构超材料为例,研究人员利用单元稳态跳转构建了5种具有平面对称模式的超材料构型,实现了几何构型及泊松比可编程性调控。此外,研究人员还发现打破基本单元几何参数对称性条件有望大幅增加超材料的设计空间,如螺旋形新型超材料等。 图 4 可重构多稳态折纸结构超材料 综上所述,本研究所提出的可重构多稳态变形结构在保持板面材料不产生形变的前提下实现了多种目标构型的高效切换,具有强大的功能重构能力,为折纸结构在多功能机器人系统、空天智能变构型系统和可编程超材料领域的应用提供了新思路。该工作得到了国家自然科学基金重大项目和重点国际合作项目的资助支持。
Wang C, Guo H*, Liu R, Deng Z, Chen Y, You Z*. Reconfigurable Origami-inspired Multistable Metamorphous Structures. Science Advances. 2024, 10(22), eadk8662. |