|
最新论文——Advanced Science | 徐楚涵同学发表恒定湿度驱动的快速滚动双螺旋机器人
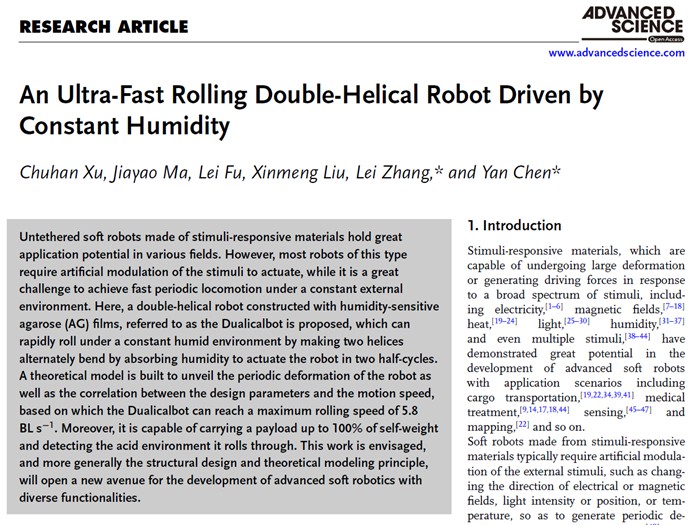
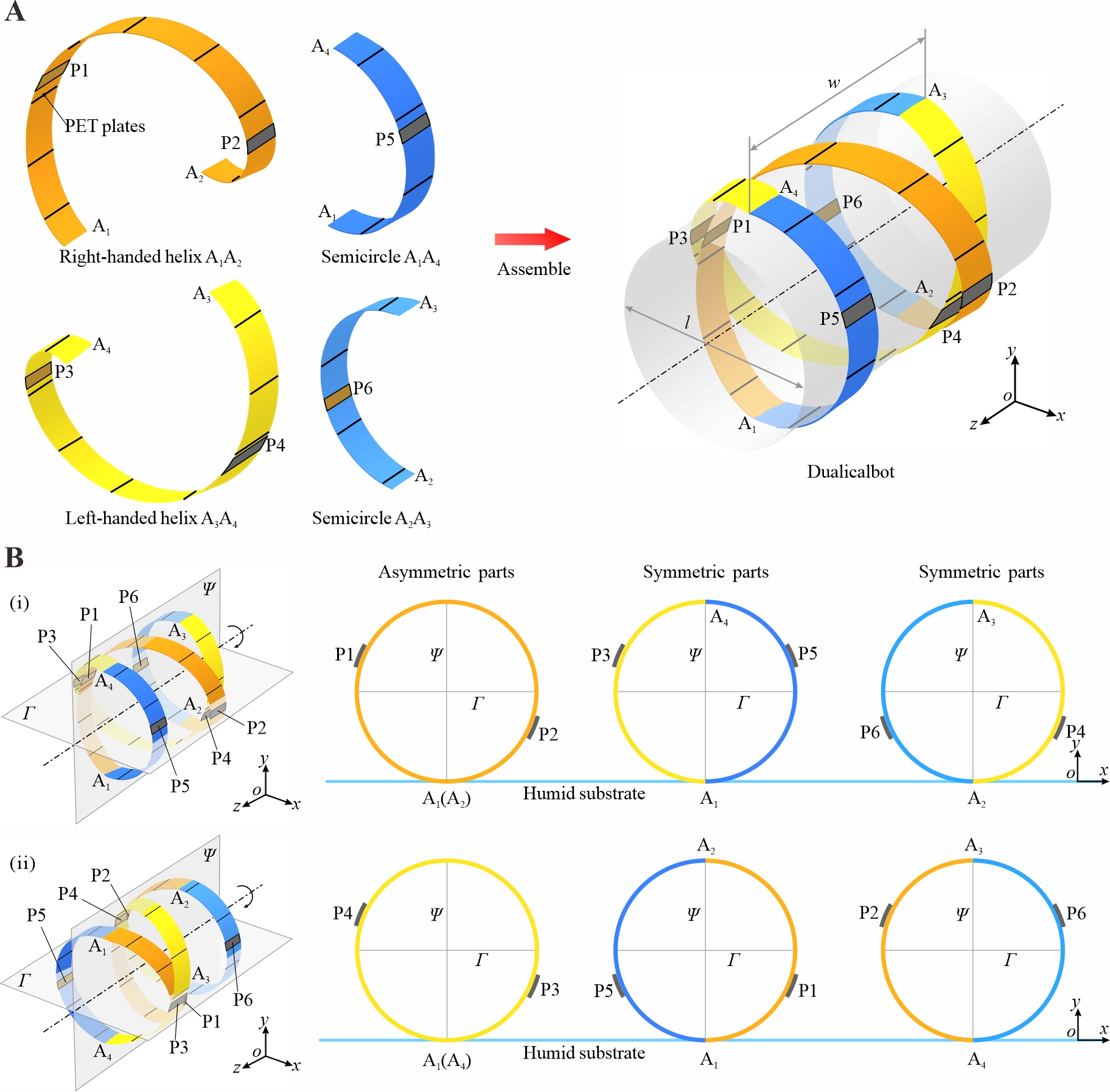
From: Date: 2025-04-03 导读 智能材料因其能够响应外界刺激并产生变形或驱动力,近年来被广泛应用于软体机器人、人工肌肉等前沿领域。多数基于此类材料的软体机器人依赖外部刺激(如电场、磁场或光场)的时空调控来实现连续运动,限制了其自主性和环境适应性。相比之下,由恒定环境驱动的软体机器人虽无需调控外部刺激,但速度相对较慢。 研究内容 研究人员将一段左手螺旋、一段右手螺旋以及两段圆弧首尾相连形成双螺旋机器人Dualicalbot(图1A)。相较于常见的单螺旋结构,Dualicalbot旋转对称的两个螺旋交替吸水变形,各自重心变化产生的重力矩分别用于驱动前、后半个周期,这使得每个螺旋变形驱动后有半周期的时间恢复构型,无需额外的恢复阶段,从而提高了运动速度。此外,实现定向滚动还需保证变形导致的重力矩始终沿滚动方向。为了实现这一目标,研究人员在机器人的外表面巧妙选择了6个特定位置粘贴胶带来阻止局部吸水,诱导螺旋发生不对称变形,从而产生预期的驱动力矩(图1B)。 图1 Dualicalbot的结构设计与运动机理 基于能量守恒原理,研究团队构建了Dualicalbot运动过程中的能量转换模型,系统分析了化学能(水分吸收)与机械能(包括弯曲应变能、动能、重力势能及摩擦损耗)之间的转换关系。此外,利用Newton-Euler动力学方法,分析了结构局部变形如何导致机器人整体滚动。理论结果表明,机器人在每半周期开始与结束时构型近似一致(最大偏差不超过8%),滚动速度也呈现周期性变化,证明了其变形和运动具有周期性(图2)。 图2 Dualicalbot的理论建模与分析
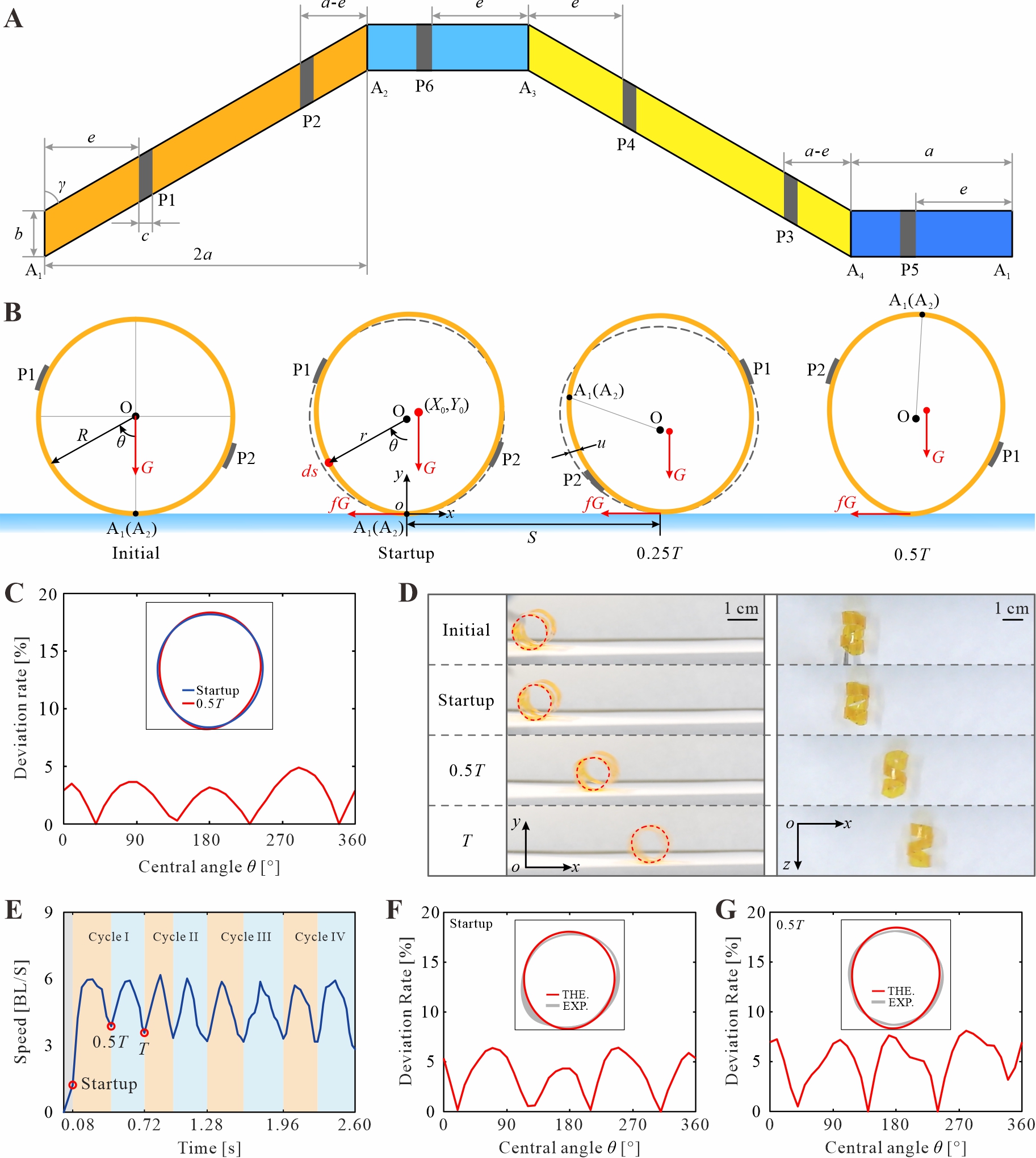
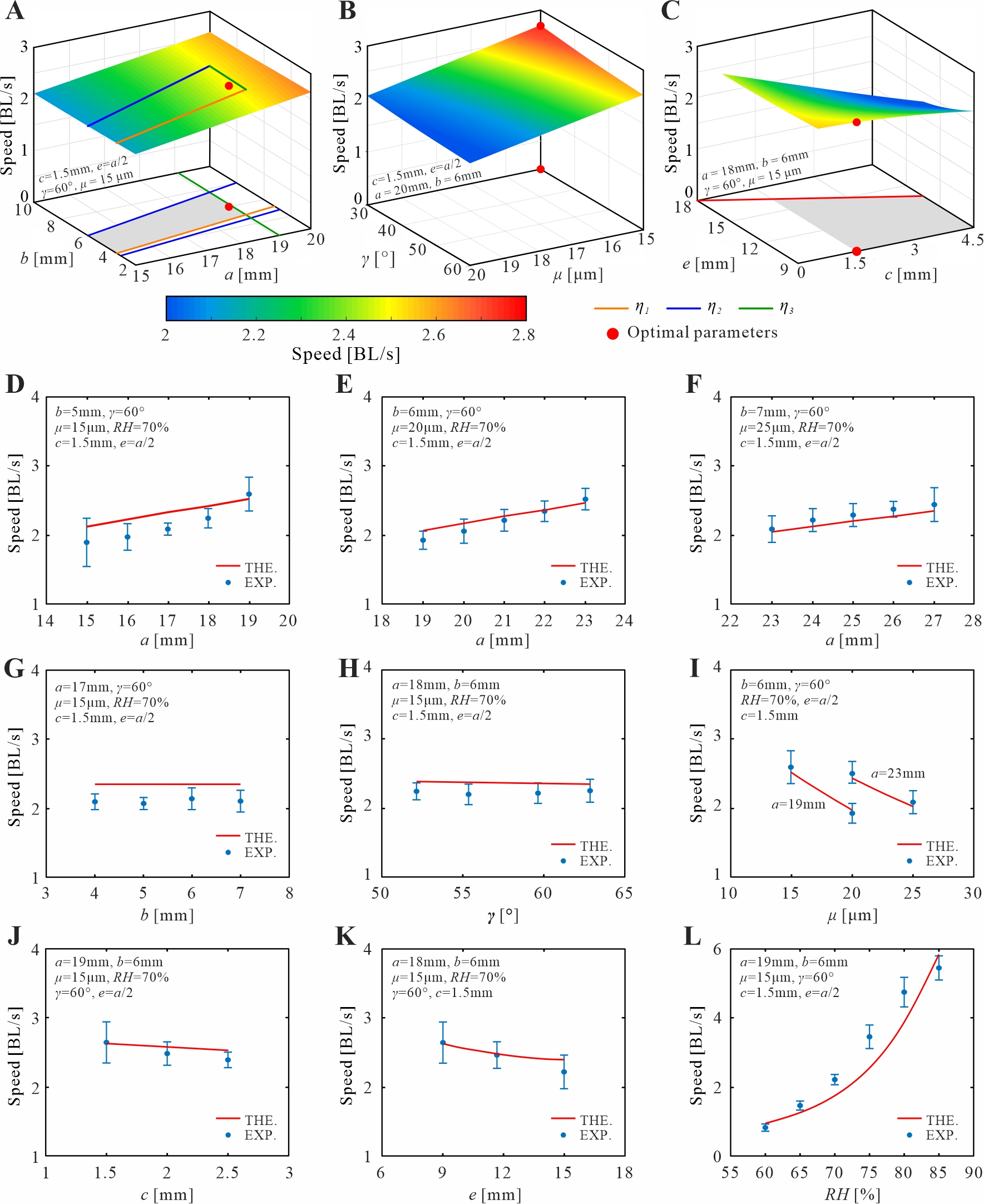
视频1 Dualicalbot的滚动过程 为了验证理论模型的可靠性和精确性,研究人员对不同几何参数以及环境湿度下的Dualicalbot机器人进行了测试。实验结果与理论预测高度一致,并由此确定了各参数的可行域以及最优的几何与环境参数(图3)。 图3 Dualicalbot的参数分析与实验验证
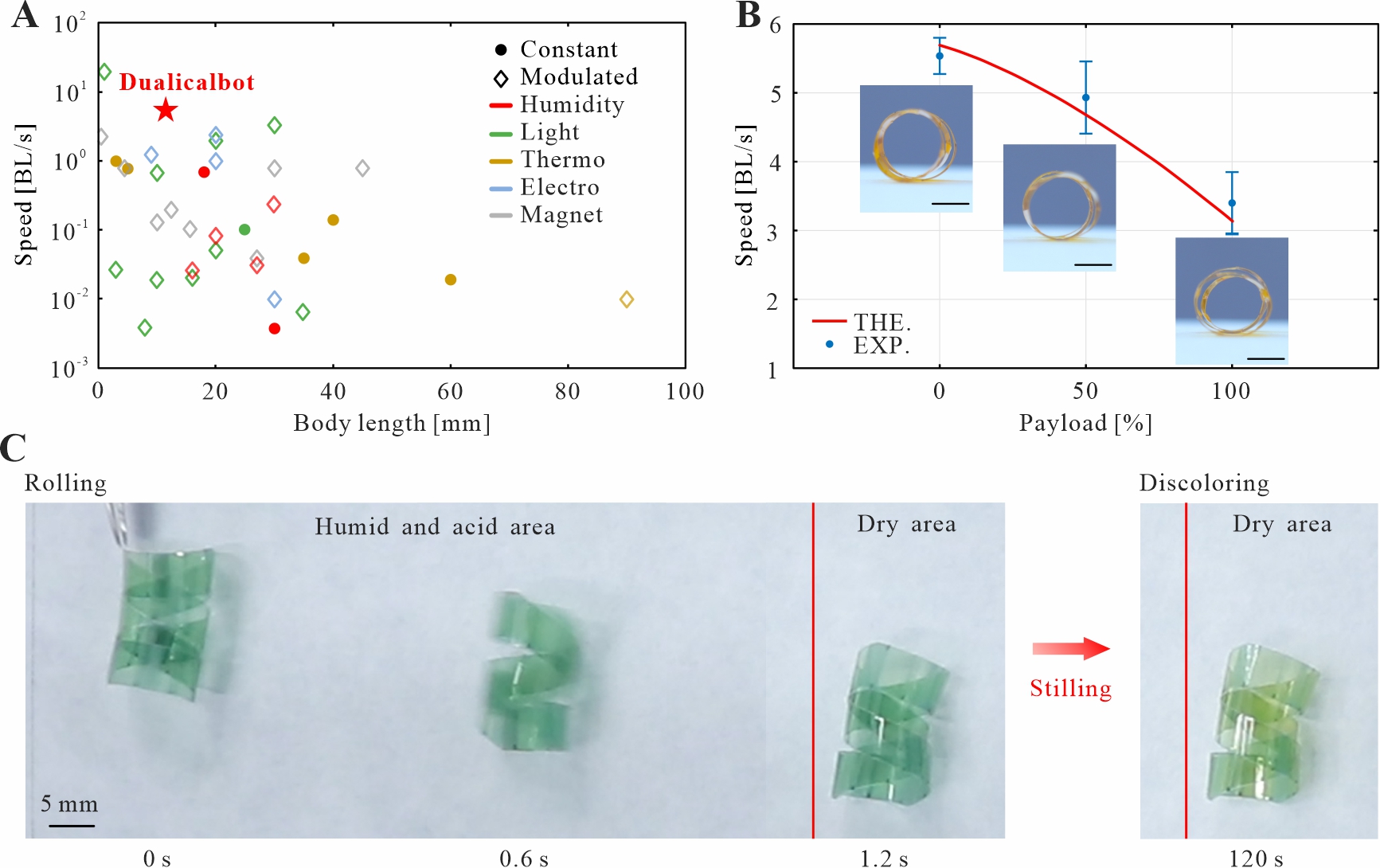
视频2 最优参数下Dualicalbot的滚动过程 独特的双螺旋结构赋予了Dualicalbot十分出色的运动性能。在最优参数下,自重仅29.5毫克的机器人最快滚动速度可达5.8体长每秒,是目前恒定环境驱动软体机器人速度的4.8倍,也超越了多数基于交变刺激驱动的无缆机器人。同时,该机器人可携带超过一倍自重的负载稳定运动(速度3.4体长每秒)。此外,用酸碱指示剂染色后的机器人,可根据其颜色变化来检测环境的的酸碱性。
图4 Dualicalbot的运动性能与应用展示
视频3 不同负载下Dualicalbot的运动
视频4 Dualicalbot用于酸性环境检测 总结与展望 综上所述,本研究提出了一种在恒定湿度下快速滚动的双螺旋机器人。通过理论建模与实验验证得到了最优的几何与环境驱动参数,进而确定了机器人的最快滚动速度。该研究提出的结构设计和理论建模方法为开发具有优越运动能力和工程应用场景的软体机器人提供了新思路。
Chuhan Xu#, Jiayao Ma#, Lei Fu, Xinmeng Liu, Lei Zhang*, Yan Chen *. An Ultra-Fast Rolling Double-Helical Robot Driven by Constant Humidity. Advanced Science, 2025, 2500577. |