|
最新论文——机械工程学报 | 王天枢与顾元庆博士发表基于7R-8R连杆机构网格的形态可重构抛物面可展天线
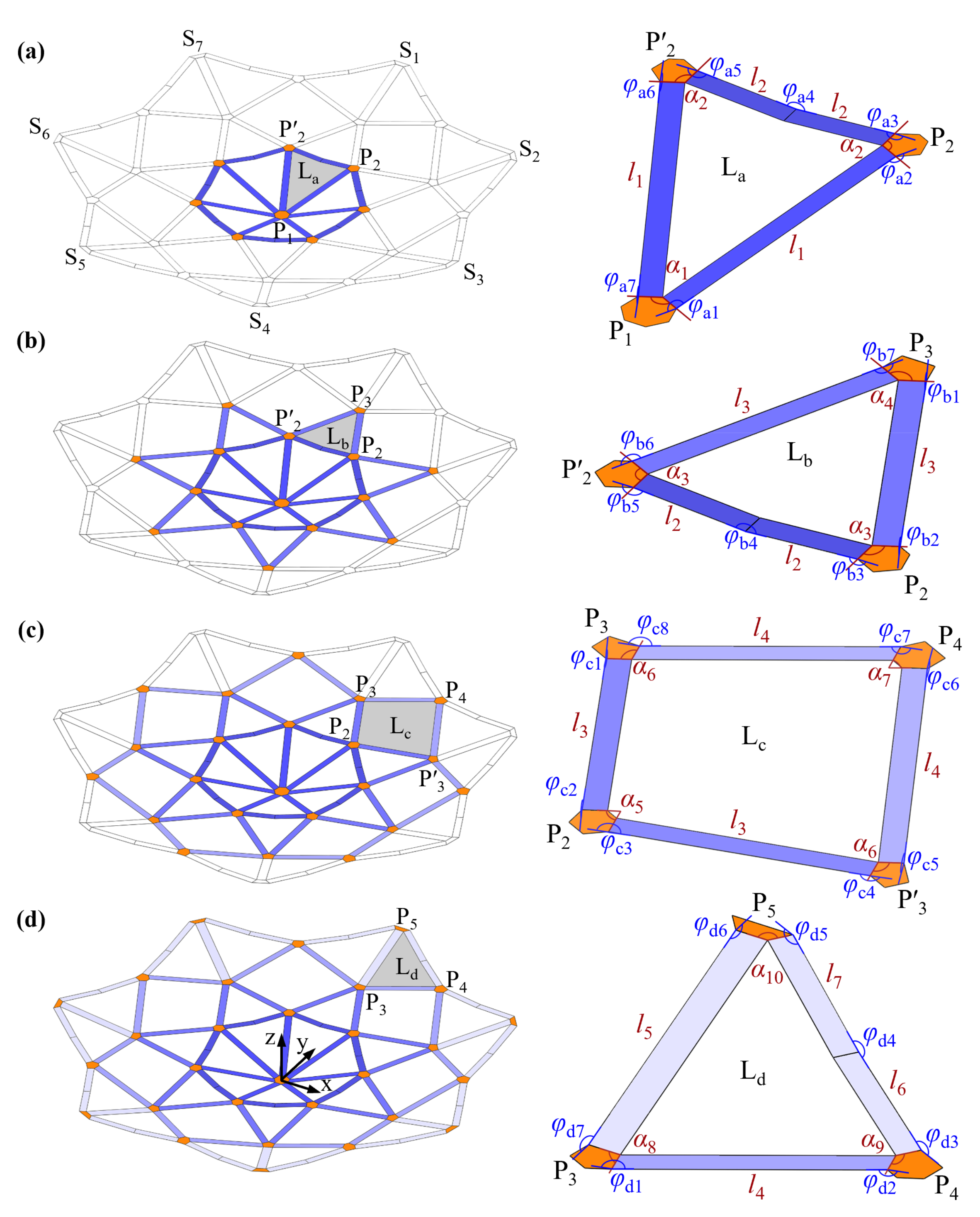
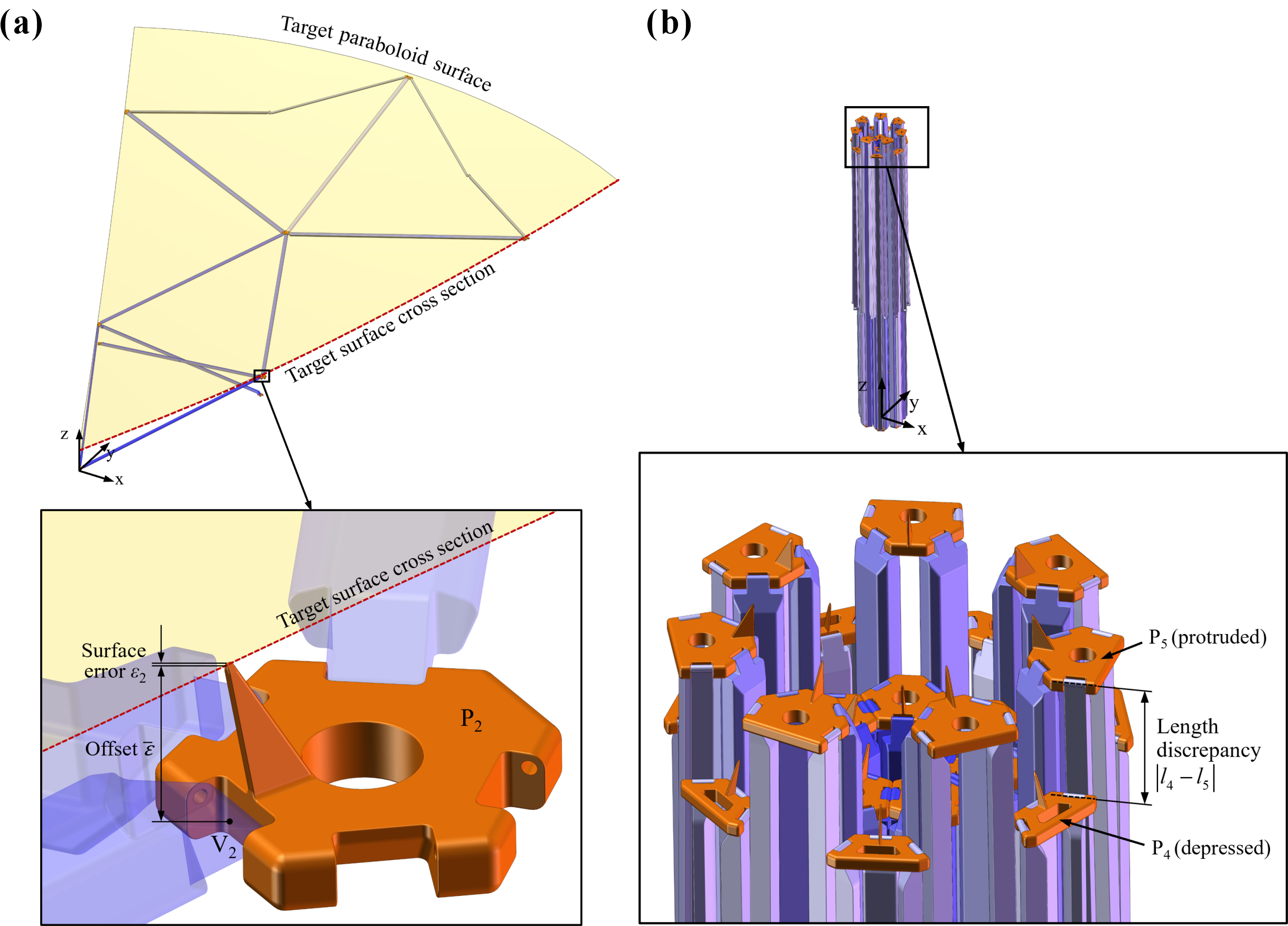
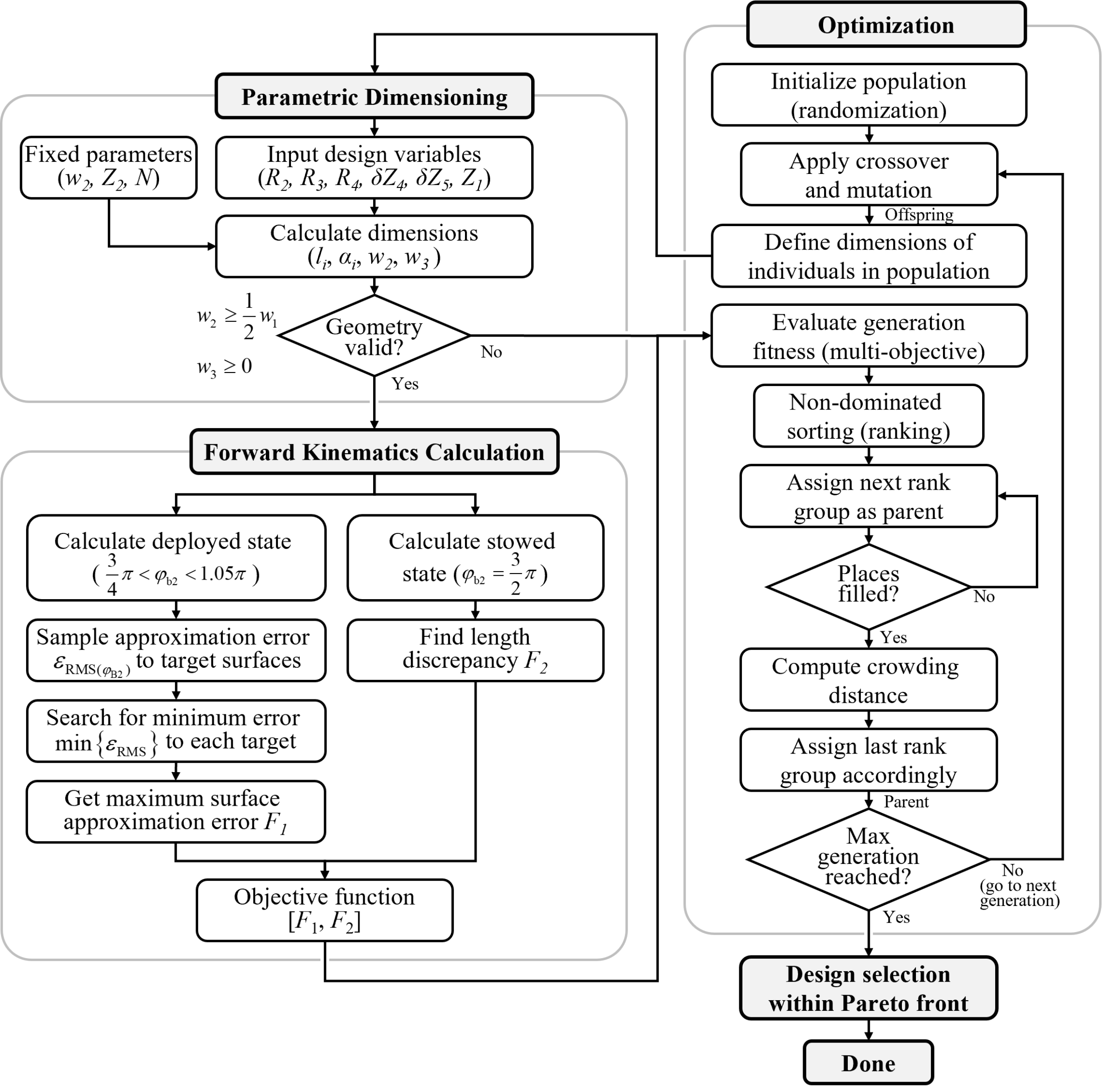
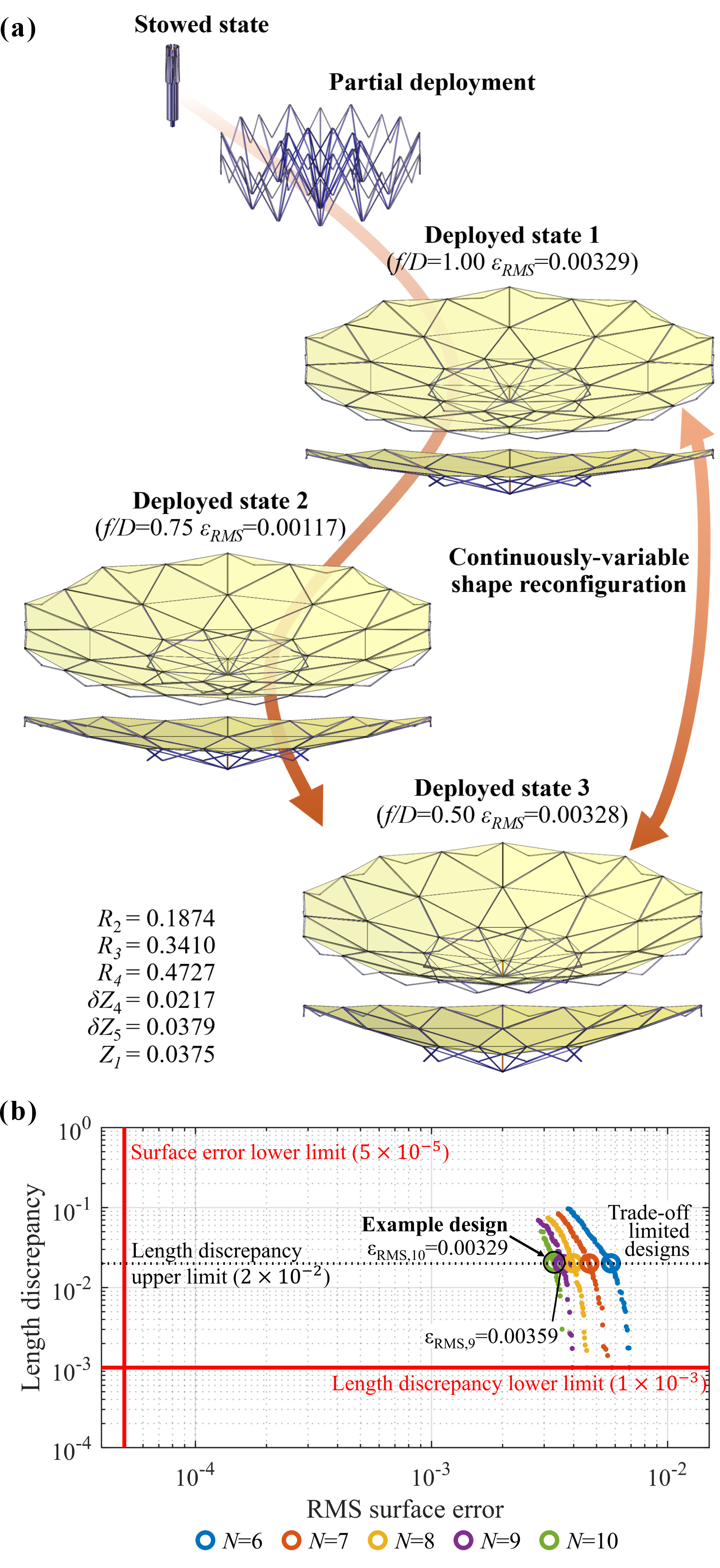
From: Date: 2025-07-22 导读 背架式可展天线使用刚性可折叠背架支撑柔性网面反射面,具有轻量化、大折展比等优势,在航天领域广泛应用于卫星雷达天线、通讯天线等。天线的重构则是通过电控或机械变形等方式实现天线波束方向等特性的调控,亦已用于卫星通讯等。背架式可展天线的形态重构能大幅扩展其功能,然而当前研究尚未实现抛物面等双曲率曲面的重构。因此,亟需提出背架式可展天线的构型与尺度设计方法,实现抛物面天线的展开与形态重构。 近日,天津大学机械工程学院陈焱教授团队以空间连杆机构网格为研究对象,基于7R与8R空间连杆机构单元设计了可用于天线背架的单自由度可展连杆机构网格,并利用NSGA-II非支配排序遗传算法优化天线对多个目标形面拟合精度及其折叠形态以完成尺度逆设计,从而实现了可展抛物面天线沿单自由度运动路径的展开与形态重构。 形态可重构抛物面可展天线的设计聚焦于其刚性可折叠背架。通过设计7R-8R空间连杆机构网格的单自由度协同运动,可使其由折叠态展开成目标形面,并进一步运动至更多目标形面,从而实现形态重构。刚性可折叠背架由7R与8R空间连杆机构单元构成。如图1所示,由网格中心开始,排布若干旋转对称的7R单元可形成第一层单自由度网格,而进一步通过共用铰链可将单自由度运动传递至第二层7R单元。第三层单元通过去约束设计,采用空间8R单元,其与二层的7R单元共用铰链与连杆,从而继承单自由度运动,而第四层7R单元亦通过共用铰链获得约束。依此类推可构建具有单自由度的多层空间连杆机构网格。 图1 连杆机构网格的逐步构建方式。 (a-d) 一至四层的7R与8R单元。 形态可重构抛物面可展天线的设计目标包括对多个目标形面的拟合精度以及其折叠态的紧凑程度。如图2a所示,拟合精度由关键节点与目标形面的纵向距离描述,对应抛物面天线的网面固定点位置。折叠紧凑程度则由背架处于折叠态时上下端的杆长差描述,更小杆长差对应更紧凑的收纳,如图2b。通过提取背架对多个目标形面的最佳拟合精度并取各精度的最大值作为一项设计指标,同时将杆长差作为另一项设计指标,并利用多目标优化算法进行寻优,可获得平衡两项指标的最优解。本文采用NSGA-II非支配排序遗传算法配合7R-8R空间连杆机构网格的机构学解析解,快速获得给定(多个)目标形面的帕累托前沿,该流程如图3所示。 图2 关键设计目标。 (a) 形面拟合精度。(b) 折叠态杆长差。 图3 基于多目标优化的连杆机构网格尺度逆设计流程。 本文的样例设计包括单、双、三目标形面设计。其中三形面设计如图4所示。图4b包含六边形至十边形连杆机构网格的设计指标帕累托前沿。该设计包含焦距-口径比为1.00、0.75、0.50的三个目标形面,可在各形面中往复重构。进一步分析则显示对于不同焦距抛物面的形态重构的拟合精度仅由最大与最小焦距目标形面决定,因而可实现抛物面天线在给定焦距范围内的连续形态重构。 图4 三目标形面抛物面反射器设计。 (a) 反射器展开与形态重构过程。(b) 设计指标(形面拟合精度与折叠态杆长差)的帕累托前沿。 上述研究的论文于2025年7月18日在线发表于机械工程学报(Chinese Journal of Mechanical Engineering)期刊。论文的通讯作者为天津大学陈焱教授,共同第一作者为天津大学博士后王天枢与顾元庆。该研究基于7R-8R空间连杆机构网格构建了单自由度刚性可折叠天线背架,并通过多目标优化算法进行其尺度逆设计,实现了对多个目标抛物面的拟合与背架的紧凑折叠。研究成果丰富了形态可重构天线的设计方法,所提出的形态可重构抛物面可展天线首次实现旋转抛物面的形态重构,在卫星反射天线等领域具有良好的工程应用前景。
Tianshu Wang, Yuanqing Gu, Yan Chen*. Shape-Reconfigurable Deployable Paraboloid Reflector Based on a 7R-8R Truss Network. Chinese Journal of Mechanical Engineering. 2025, 38: 124. |