|
最新论文——Research | 袭凯莉同学发表可调刚度层级超材料及其刚度可视化
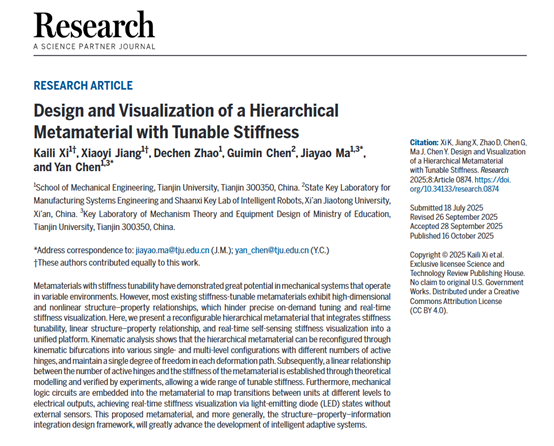
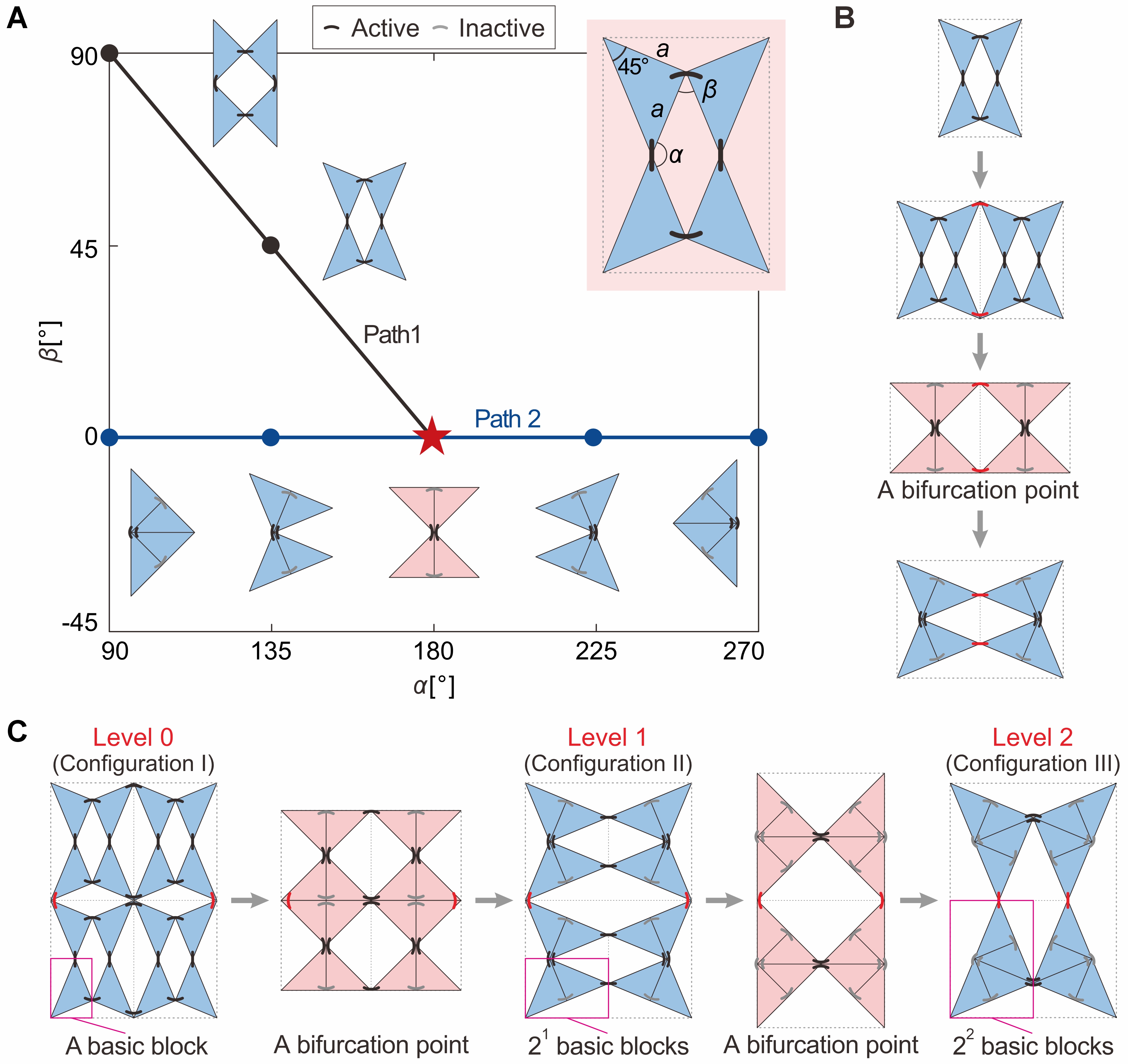
From: Date: 2025-10-21 导读 在多工况运行的机械系统中,可调刚度超材料展现出广阔的应用潜力,而实时刚度可视化技术可将刚度信息转化为数字输出,助力用户在无需依赖外部传感器的情况下精准获取调控后的刚度数值,显著提升操作便捷性;然而,当前多数可调刚度超材料存在高维度、非线性的结构-性能关联特性,这使得超材料的结构特性、性能表现与输出信息之间难以建立稳定可靠的映射关系,阻碍了刚度的精确按需调节和实时可视化。 为此,天津大学机械工程学院陈焱教授团队设计了一种可重构层级超材料,通过建立超材料刚度与其活动铰链数的线性关系,实现了结构-性能关系的线性化。在此基础上,团队在超材料中嵌入了机械逻辑电路,将不同层级的构型转化为LED可视化的刚度值,实现了结构、性能与信息的一体化,从而实现了大范围的可调刚度与实时自感知刚度可视化。相关成果以“Design and Visualization of a Hierarchical Metamaterial with Tunable Stiffness”为题,于2025年10月16日在线发表于国际综合性期刊《研究》(Research)。论文共同通讯作者为天津大学陈焱教授和马家耀教授,共同第一作者为天津大学博士生袭凯莉和硕士生姜小易。硕士生赵德琛为本工作提供了重要的实验支持,西安交通大学陈贵敏教授也参与指导了研究工作。该研究由国家自然科学基金资助完成。 研究内容 研究团队以四个三角块组成的平面四连杆机构为基础,借助其运动分岔特性,将多个单元在平面内进行密铺,成功构建出一种单自由度的可重构层级超材料。这种超材料能够在不同构型间通过运动分岔点进行切换,并且在除分岔点之外的每条运动路径上均保持单自由度运动。团队根据构成平面四连杆机构单元的三角块尺寸,进一步定义了超材料的层级:当单元由基本三角块构成时,为0级;而当三角块合并成更大的块时,层级相应增加。以图1C中的2×2超材料为例,在0级时,它包含四个0级单元;在1级时,有两个1级单元;到了2级时,则仅剩一个2级单元。此外,在基本三角块合并为更大块的过程中,被大三角块包围的铰链不再旋转,被称为非活动铰链。因此,在超材料的重构过程中,其活动铰链的数量会随着构型的变化而改变,如图1C所示,三个层级构型下的活动铰链数分别为22、14和6。 图1 可重构超材料的设计及其层级特性 除了单级构型外,该超材料还可重构为包含不同层级单元的多级构型(图2)。例如,2×2超材料除三种单级构型外,还能形成包含两个0级单元和一个1级单元的多级构型(图2A)。由于多级构型存在对称等价现象,即不同构型可通过二阶旋转、垂直镜像或水平镜像从同一构型得到,团队排除了这类对称等价构型(图2A中灰色构型),仅保留其中一个作为对称独立构型。进一步将超材料拓展到2×4乃至4×4超材料,多级构型的数量显著增加,涵盖多种不同层级单元的组合,如0&1级、0&2级、0&1&2级等(视频1)。团队通过递归分析计算了超材料多级构型和总构型数量,并剔除对称等价构型,确定了对称独立构型的数量(图2D)。 图2 多级构型重构分析
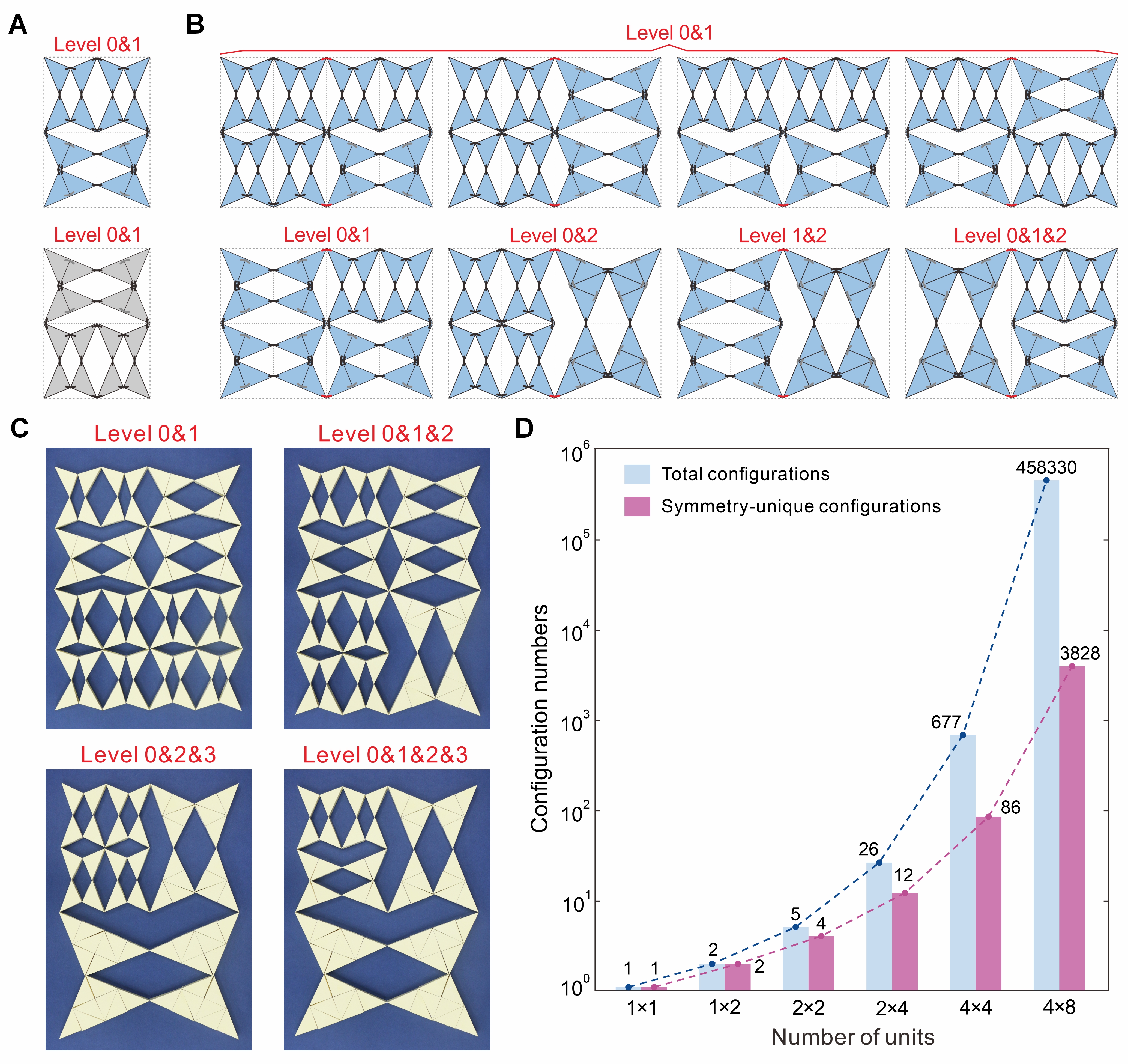
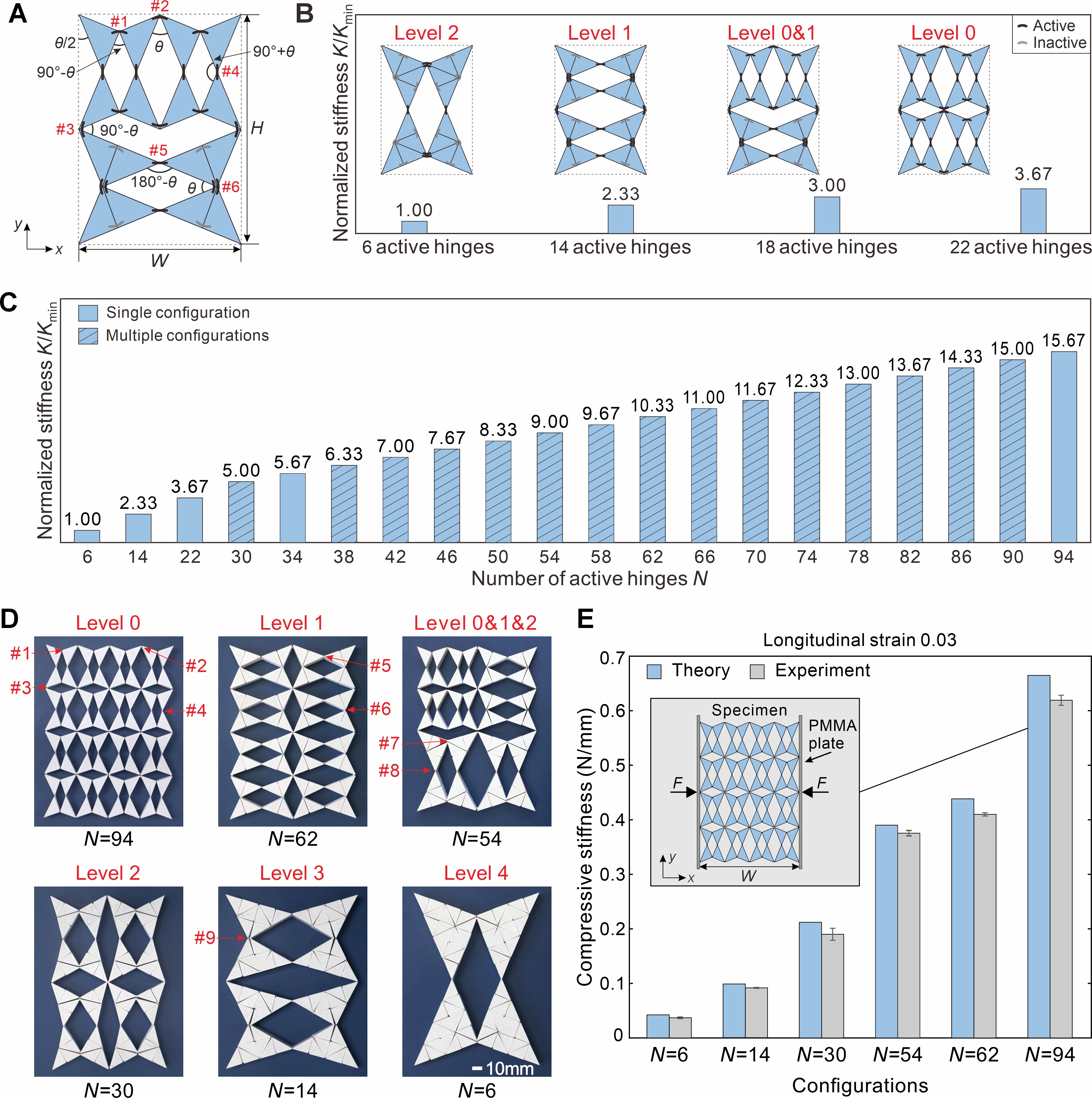
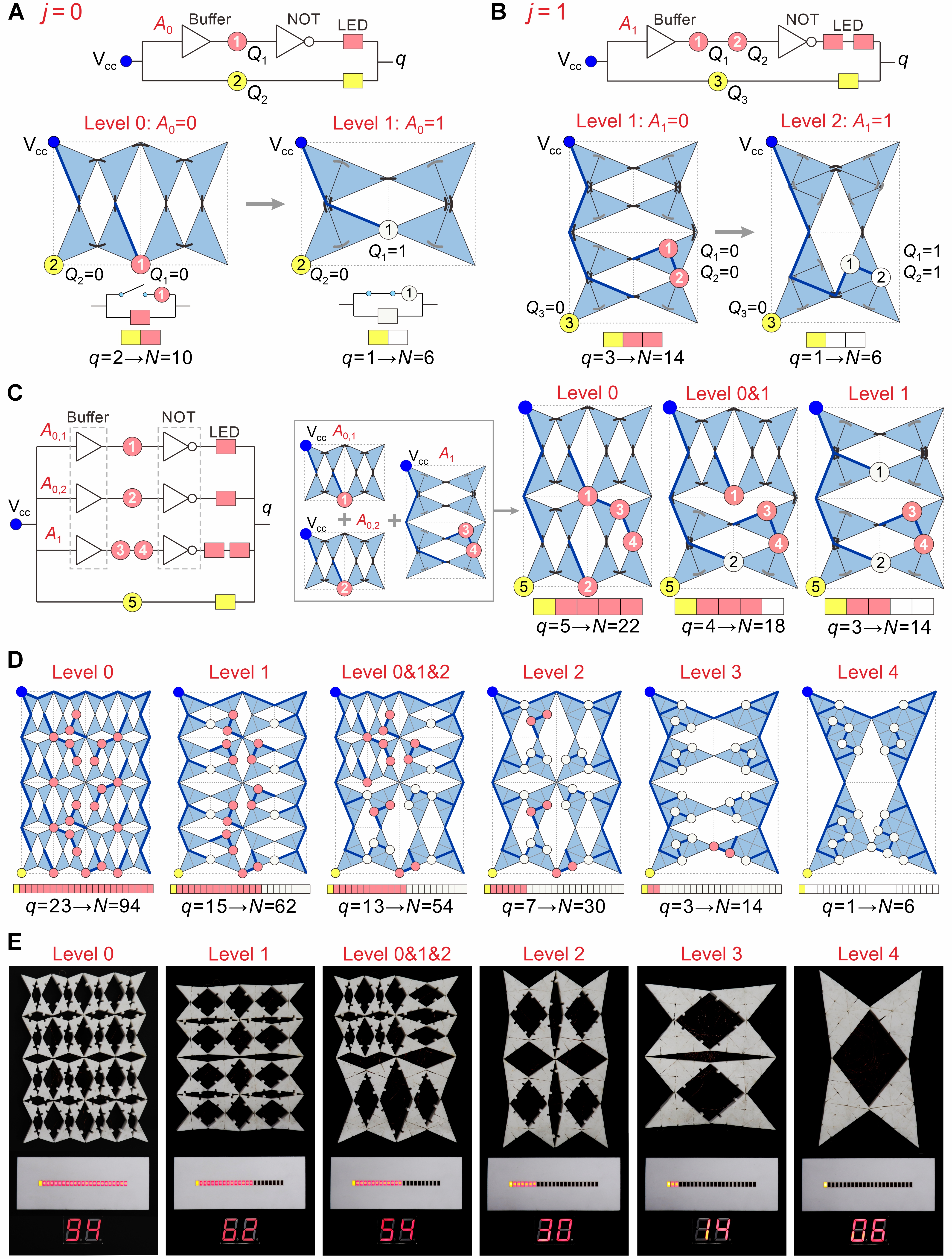
视频1 超材料的重构过程 接下来,研究团队进一步探索了这种层级超材料的可调刚度特性(图3)。这种超材料能够在不同层级构型之间切换,进而改变活动铰链的数量,从而实现广泛的刚度调节。通过理论分析,团队发现当所有单个铰链的转动刚度一致时,超材料的压缩刚度与其活动铰链的数量呈线性关系。以4×4超材料为例,其拥有86个对称独立构型,涵盖20种不同的活动铰链数:6、14、22、30、34、38、42、46、50、54、58、62、66、70、74、78、82、86、90和94,刚度调节范围可达15.67倍,实验结果证实了理论预测的准确性。 图3 层级超材料的可调刚度 最后,研究团队开发了一种实时刚度可视化的方法,通过在超材料中嵌入机械逻辑电路,将不同层级单元之间的转换映射到电输出,从而无需外部传感器即可显示超材料的活动铰链数量以及刚度。以4×4超材料为例,实验结果(图4E,视频2)表明,超材料的活动铰链数量可通过LED灯的状态和7段数码管显示器精确显示,验证了所提出设计的可靠性。 图4 可调刚度层级超材料的活动铰链数可视化
视频2 4×4超材料的实时刚度可视化 综上所述,本研究提出了一种可重构层级超材料,建立了超材料刚度与其活动铰链数之间的线性关系,并将机械逻辑电路嵌入超材料,从而实现了大范围的可调刚度与无需外部传感器的实时刚度可视化,为具备自感知与自适应能力的智能系统铺平了道路。
Kaili Xi#, Xiaoyi Jiang#, Dechen Zhao, Guimin Chen, Jiayao Ma*, Yan Chen*. Design and Visualization of a Hierarchical Metamaterial with Tunable Stiffness. Research. 2025, 8:0874.. |