|
最新论文——Advanced Robotics Research|刘伟奇与王春龙博士发表两栖折纸机器人
From: Date: 2025-11-12 导读 从青蛙跃入水面,到跳鱼往返潮滩,自然界中许多生命体能够在陆地与水域之间自如切换,其运动方式虽简单,却极其高效。而在机器人领域,实现“真正的两栖”却并非易事——陆地爬行与水下推进依赖截然不同的运动机制,传统方案往往依赖多驱动器与复杂控制系统,难以在尺寸、重量与可靠性之间取得平衡。如何以尽可能简单的结构和驱动跨越两种截然不同的环境,一直是两栖机器人研究的难题。 近日,天津大学陈焱教授和马家耀教授团队提出了一种折纸启发的两栖机器人设计。该机器人仅依靠一根形状记忆合金(SMA)驱动丝,即可实现陆地和水下的直线爬行与转向控制。该研究为软体机器人领域在结构、驱动与运动行为一体化设计提供了新的范式。研究成果发表在Wiley旗下的机器人新刊《Advanced Robotics Research》上。论文通讯作者为天津大学机械工程马家耀教授与陈焱教授,第一作者为博士后刘伟奇和王春龙。天津大学硕士研究生孙晓航为本研究作出了重要贡献。该研究由国家自然科学基金、腾讯基金(科学探索奖)、国家重点研发计划“智能机器人”重点专项资助完成。
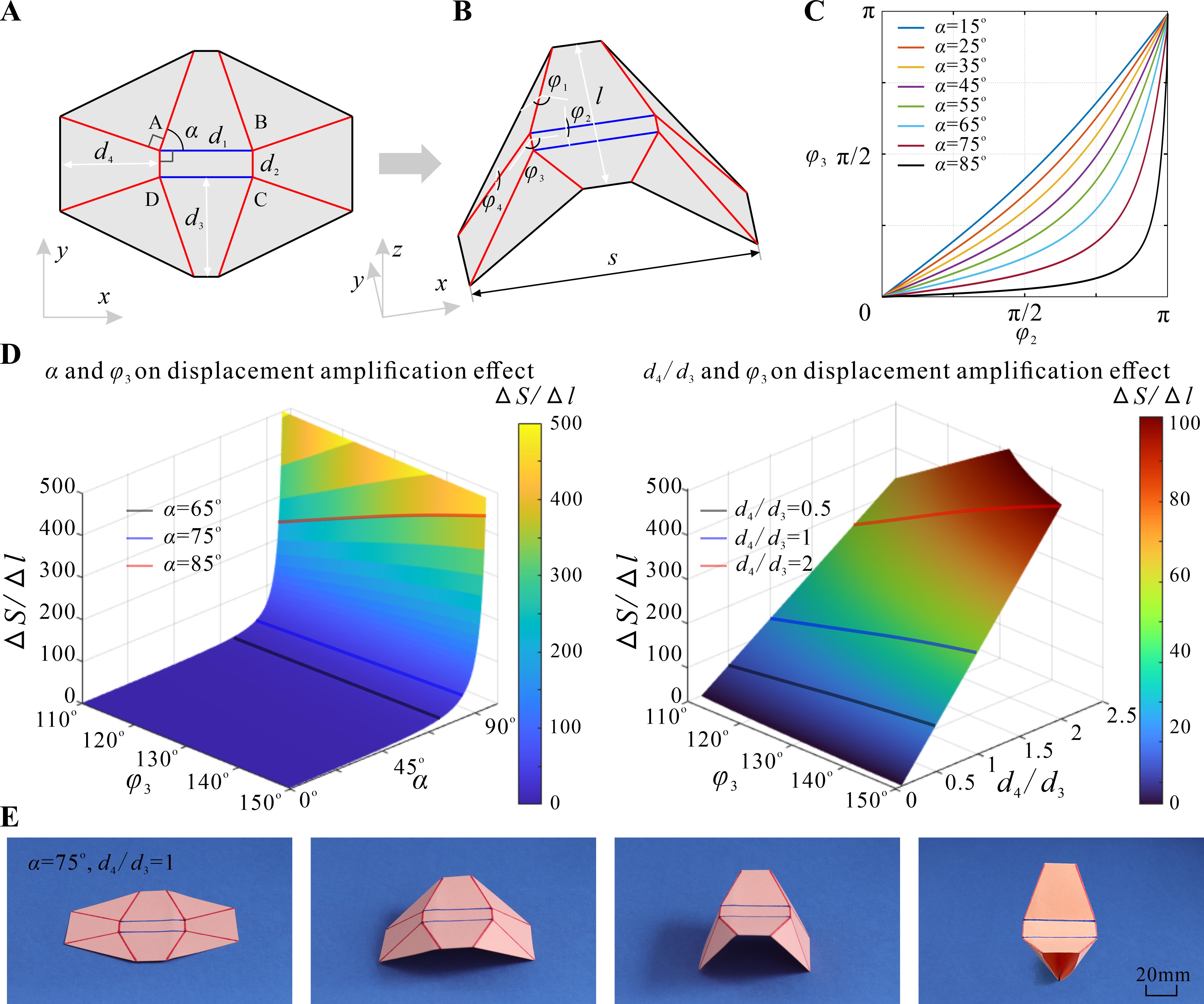
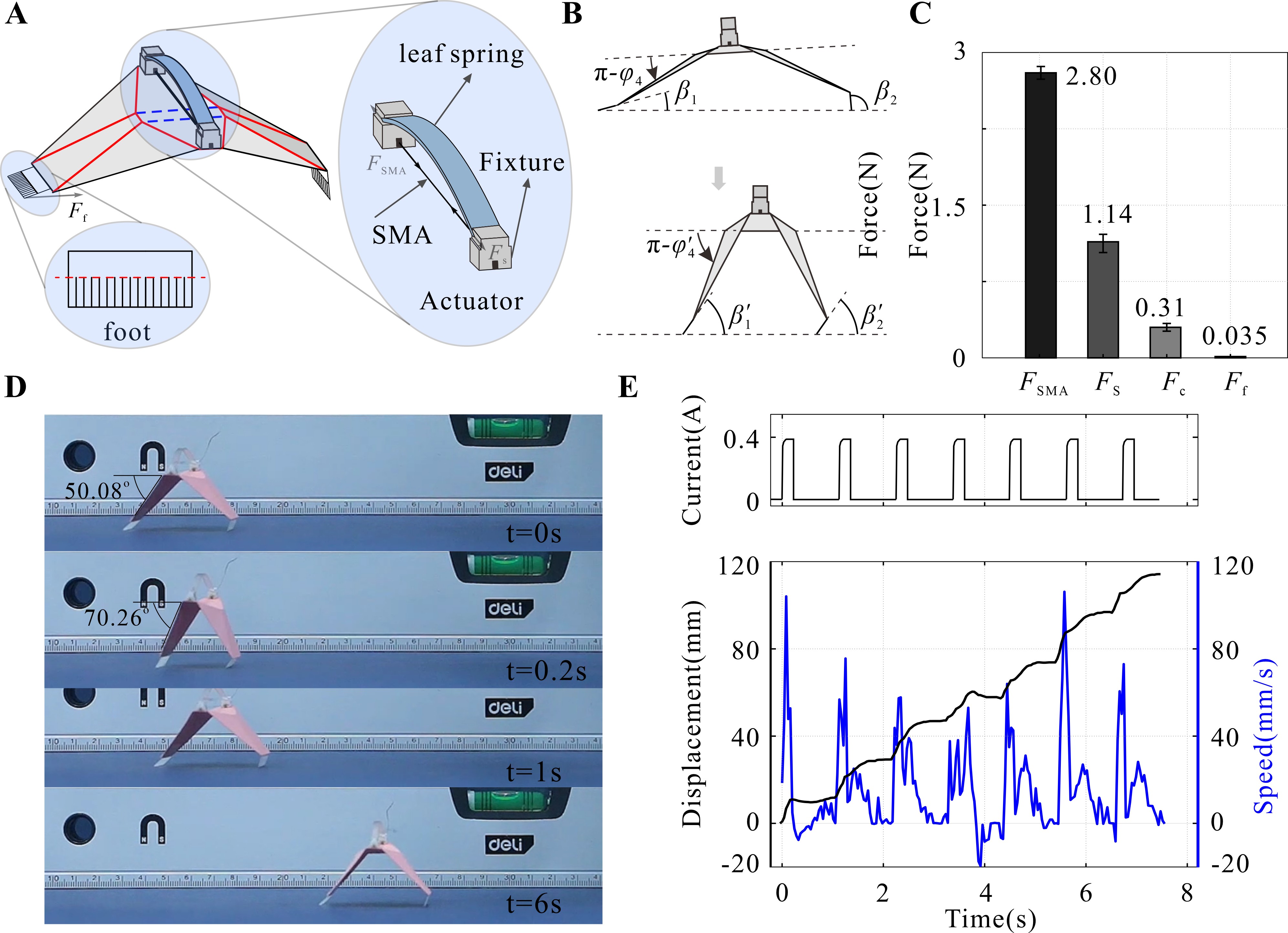
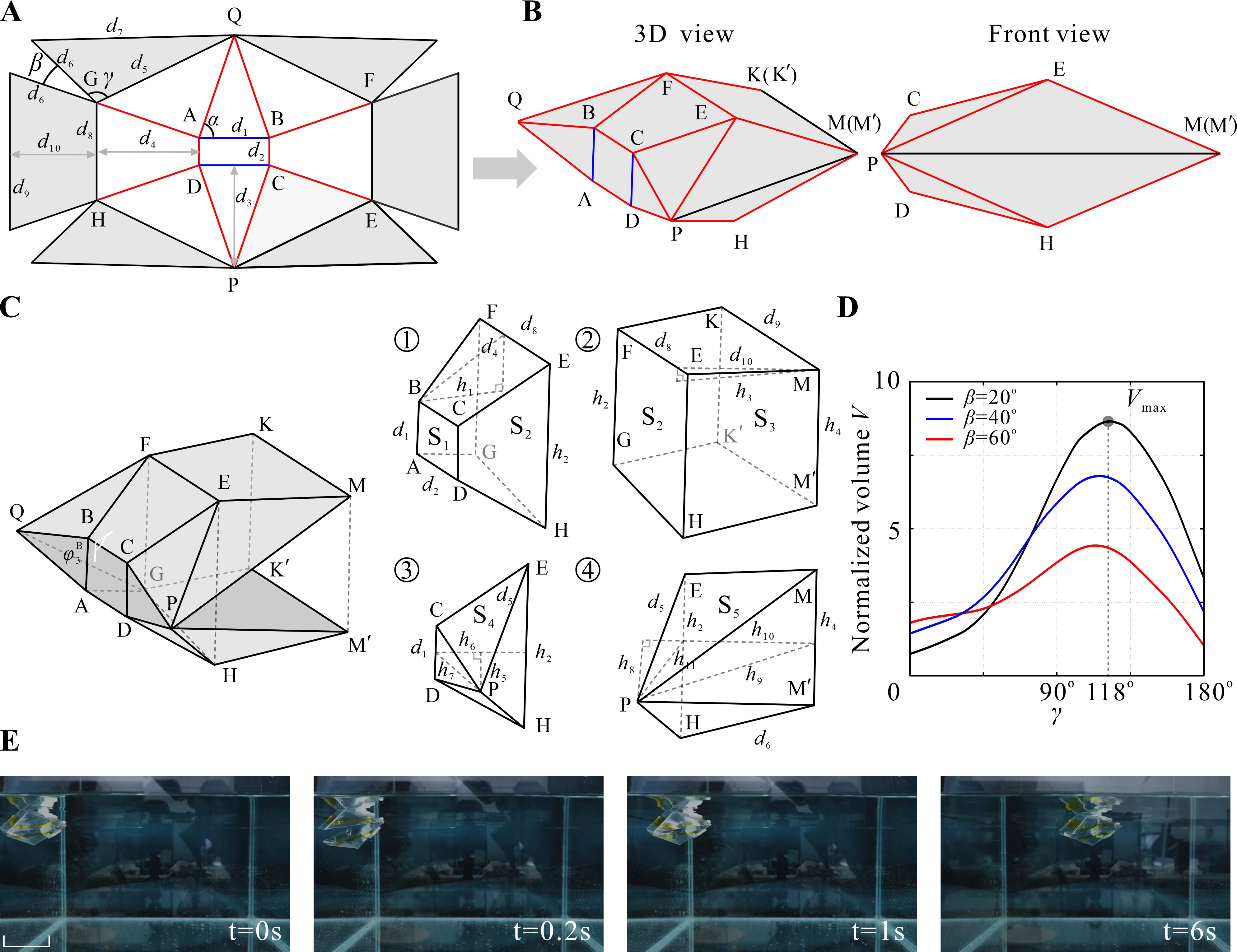
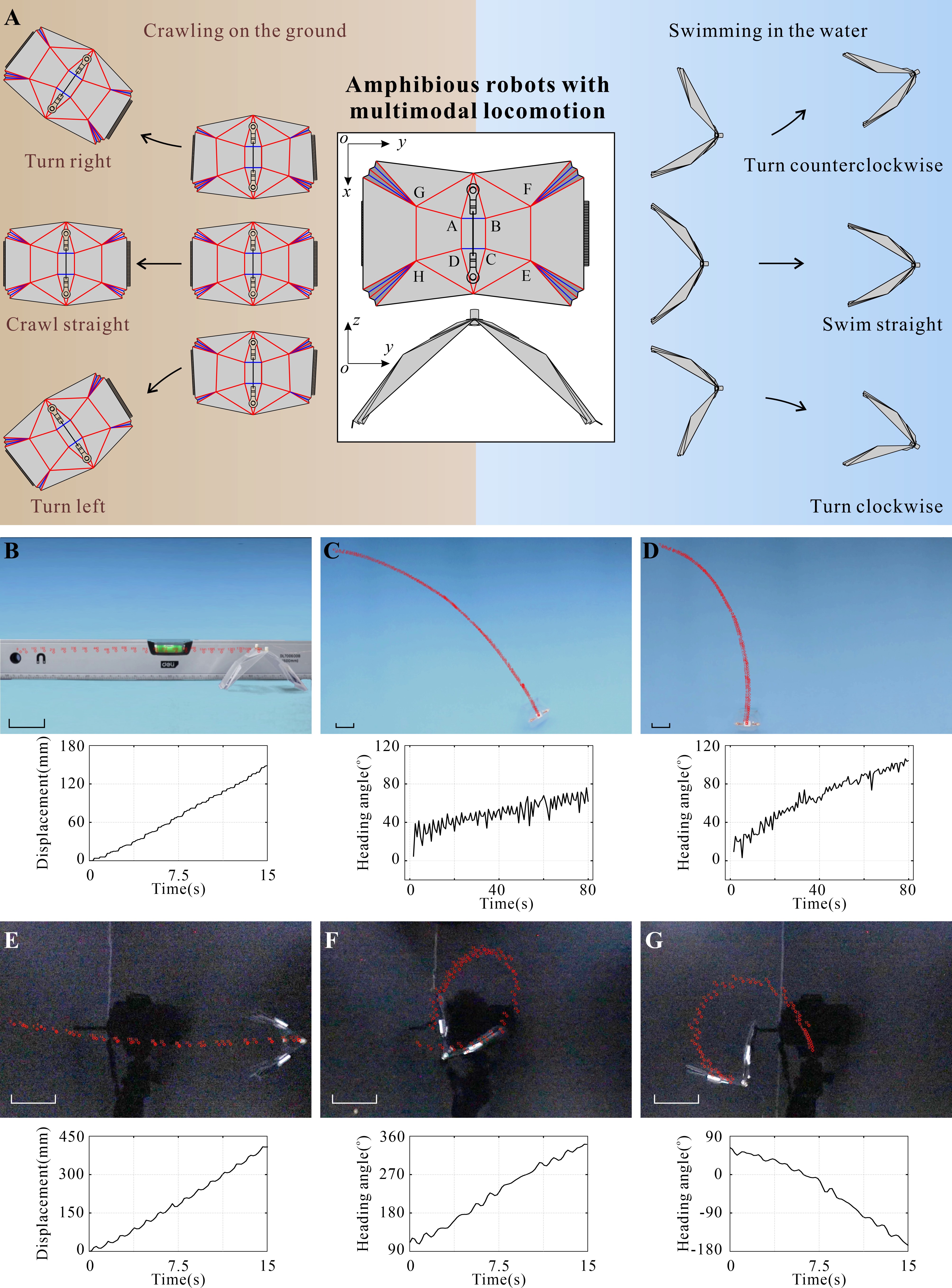
视频1 水陆两栖折纸机器人视频摘要 研究团队从折纸艺术中获得灵感,设计出了一种具备位移放大能力的单自由度折纸结构(图1)。该结构由四个相同的四折痕顶点(A、B、C、D)通过公共折痕连接形成闭合环路,整体图案同时具有水平和垂直镜面对称性。每个顶点及整个环路均满足刚性平折条件,确保折纸既可平面展开,又能刚性折叠成三维构型。在运动学分析中,研究人员将折痕视作铰链、面板视作连杆,并将每个顶点建模为球面四杆机构,使得整个折纸结构可被视作四个球面四杆机构的装配体。运动学模型显示,当几何参数α从15°增至85°时,折叠输入角度的微小变化能够在特定区间内被显著放大,产生较大的输出角度。进一步分析表明,当在y方向施加小幅位移时,结构在x方向产生显著响应,实现了高效的运动传递。这一位移放大效应赋予折纸结构在小应变驱动下实现大幅度运动的天然优势,为机器人设计提供了结构基础。 图1 具有位移放大特性单自由度折纸结构。 在验证折纸结构的位移放大效应后,研究团队将其应用于陆地爬行机器人(图2)。该机器人由折纸主体、SMA驱动器和各向异性脚组成。驱动器包括形状记忆合金丝、片弹簧及3D打印固定件:施加电压时,SMA丝收缩产生驱动力;断电后,片弹簧提供恢复力,实现结构复位。脚采用齿状PET条,分别安装在头尾,固定角度不同,在地面形成各向异性摩擦,实现前后脚交替抓地和滑动,从而完成连续爬行。实验显示,0.782 g原型机器人在0.4 A电流、1 Hz频率下,SMA丝产生0.46 mm收缩位移,经折纸结构放大后驱动腿部前移11.5 mm。利用位移放大效应,机器人实现11.56 mm/s(约0.16体长/秒)的爬行速度。 图2 陆地直线爬行折纸机器人。 在实现陆地爬行后,研究团队将折纸机器人的运动能力拓展至水下推进(图3)。基于陆地爬行折纸图案,在主体周围增加四个三角形面板和两个梯形面板,形成裙边结构。新引入的折纸顶点E、F、G、H虽然不满足平折条件,但运动学分析表明,整个结构仍为单自由度系统,并在折叠后形成封闭轮廓。这一封闭轮廓使折纸内部能够在折叠和展开过程中捕获并压缩水体,为射流推进提供条件。在水下运动中,折纸快速折叠时,裙状结构内部的水被迅速挤向尾部,形成向后的喷射流,产生前向推力;随后结构缓慢展开,水流缓慢回补,形成时间非对称的体积变化,实现高效射流驱动。实验显示,机器人在单根SMA丝驱动下可稳定游动,直线速度约为27.99 mm/s(0.37体长/秒)。 图3 水下直线游动折纸机器人。 在实现单向陆地爬行和水下游动后,研究团队进一步开发出多模式两栖折纸机器人(图4)。为突破原有结构在陆地和水下仅能直线运动的限制,在折纸裙状结构的三角形与梯形面板间加入扇形单元。这一改进在保持机器人本体可由单张片材制造的优势的同时,增强了机器人的运动灵活性。在陆地上,通过预折扇形单元打破脚摩擦对称性,机器人可实现左、右转向;在水下,当扇形顶点呈现凸-凹不对称配置时,水流排出速度差产生转矩,使机器人能够定向转向,实现水下操控。实验结果显示,1.48 g原型机器人在陆地直线爬行速度可达9.89 mm/s(0.12体长/秒),预折50%和100%的扇形单元分别实现平均转向速度0.58°/s和1.01°/s。在水中,机器人直线游动速度为25.3 mm/s(0.29体长/秒),通过顶点翻转实现的顺时针与逆时针转向平均速度分别为9.76°/s和10.90°/s。 图4 多模式两栖折纸机器人。 综上所述,本研究通过将刚性可折叠折纸结构与SMA驱动结合,实现了小应变驱动的大幅位移放大效果。所构造的机器人仅依靠一根形状记忆合金驱动丝,即可在陆地和水下完成直线爬行与转向控制,为轻量化、多模式、低功耗的两栖机器人设计提供了新的思路。
Weiqi Liu#, Chunlong Wang#, Xiaohang Sun, Hongwei Guo, Jiayao Ma*, Yan Chen*, Origami-Inspired Structural Design for Aquatic-Terrestrial Amphibious Robots, Advanced Robotics Research, 2025, 0, e202500171. |