|
最新论文——Advanced Intelligent Systems | 贾振浩同学发表基于单一编织管的多模式软体机器人
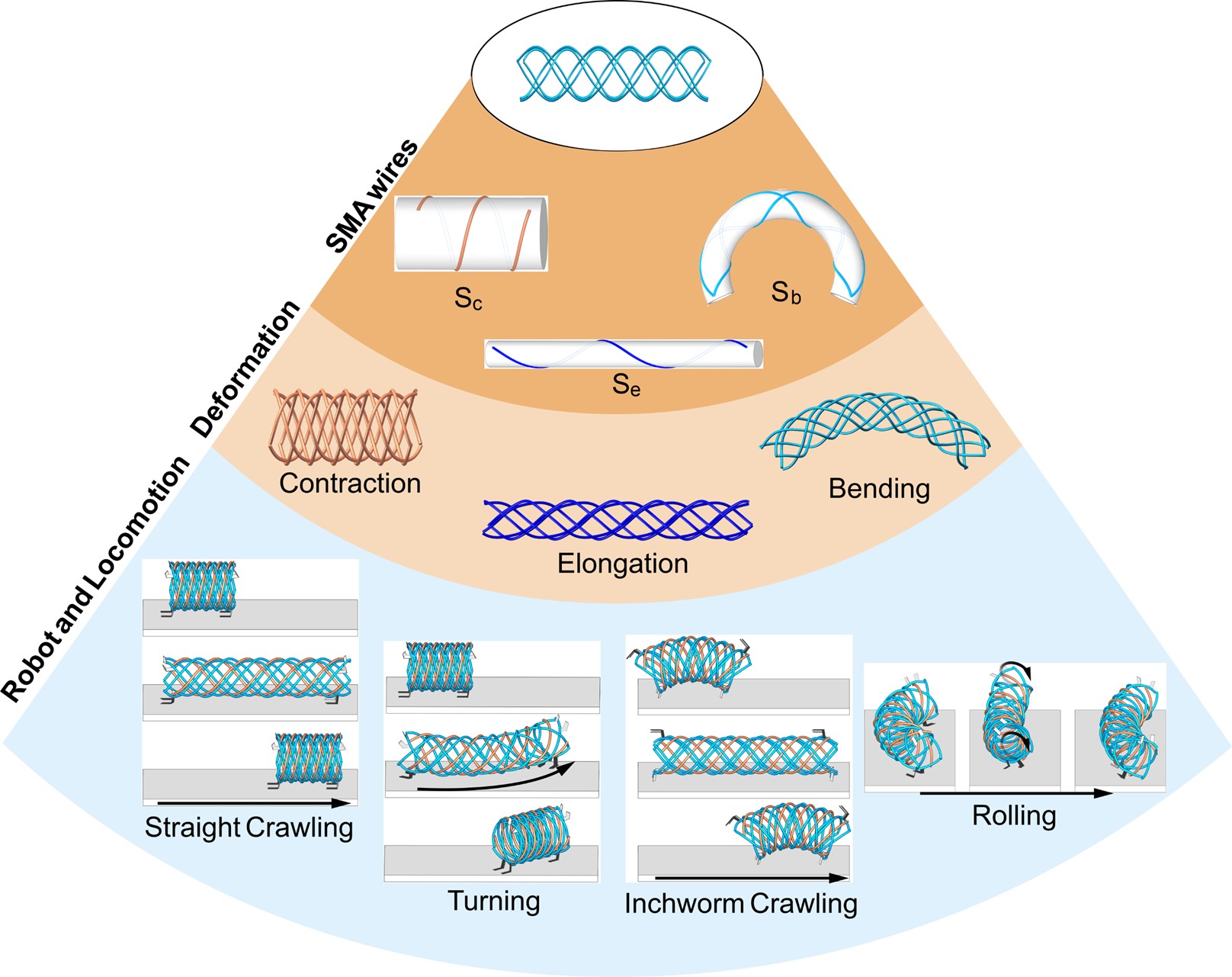
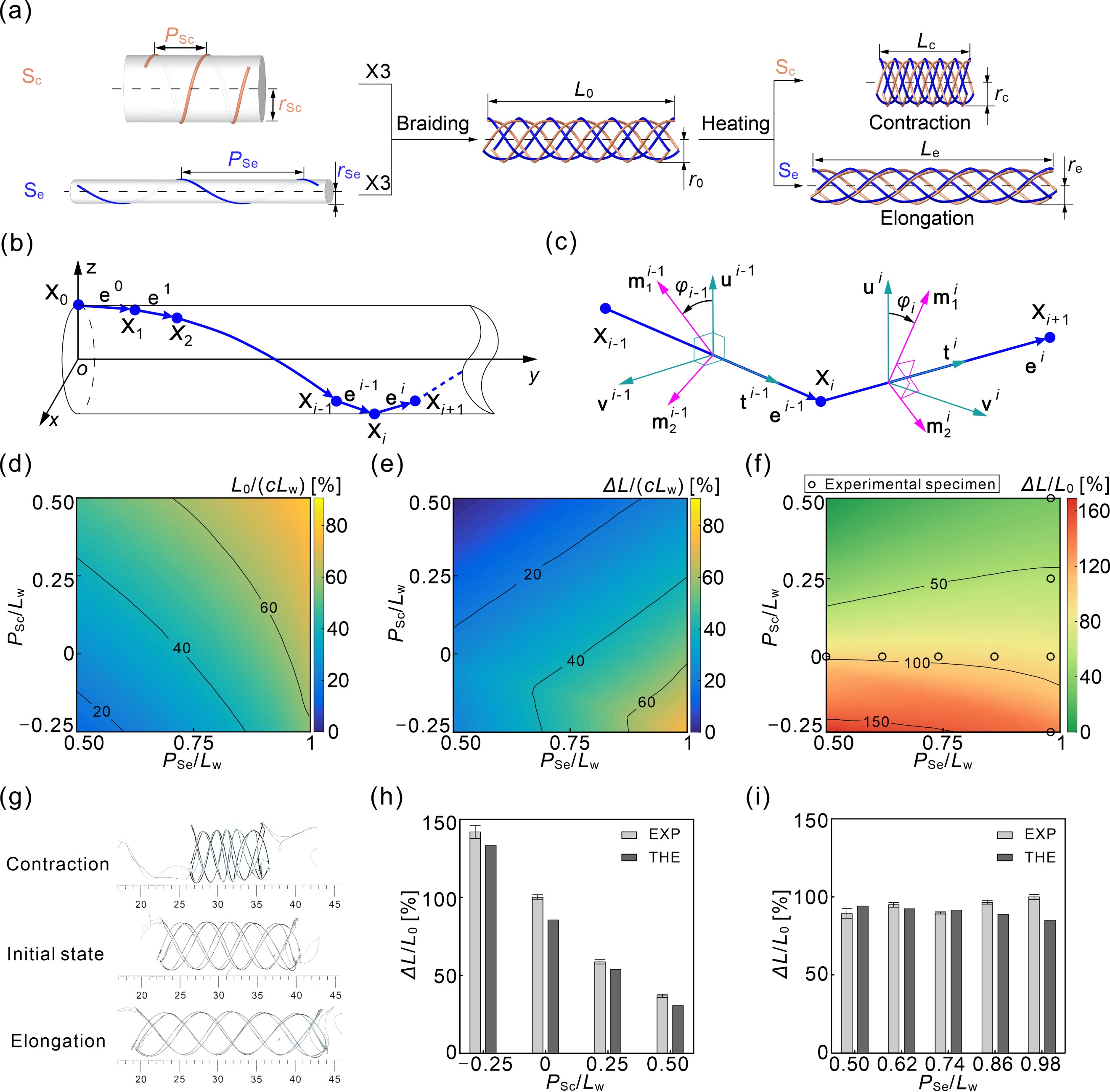
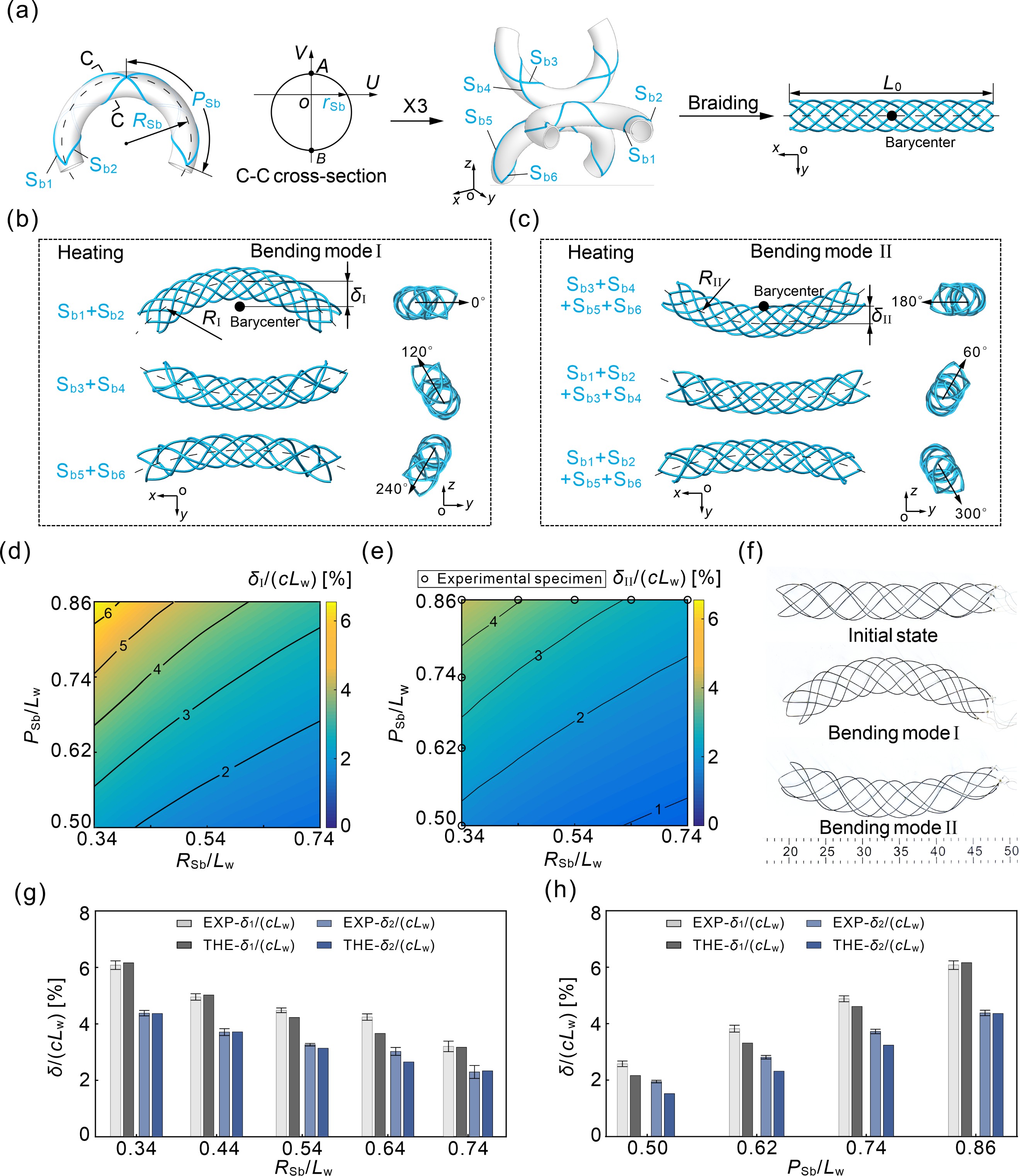
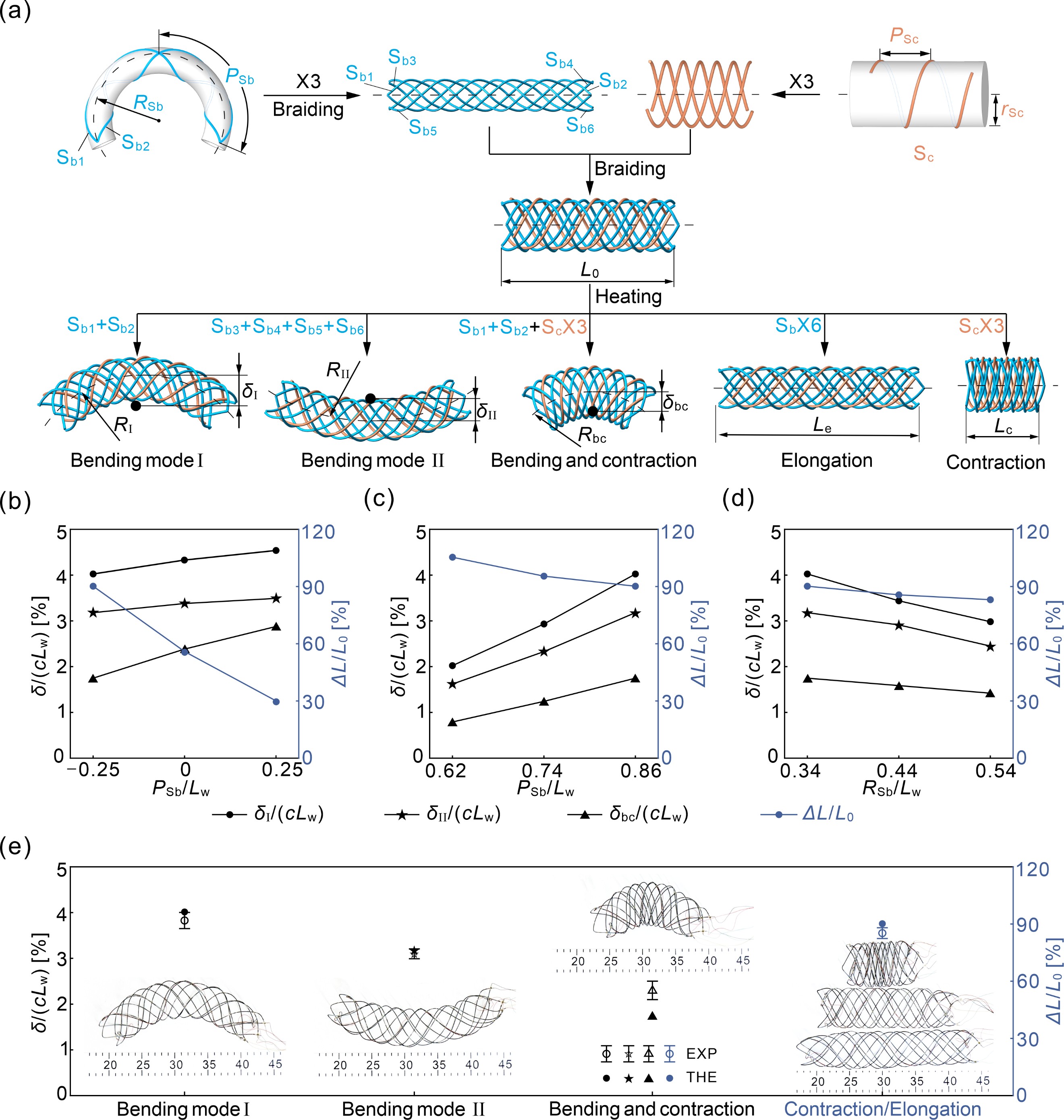
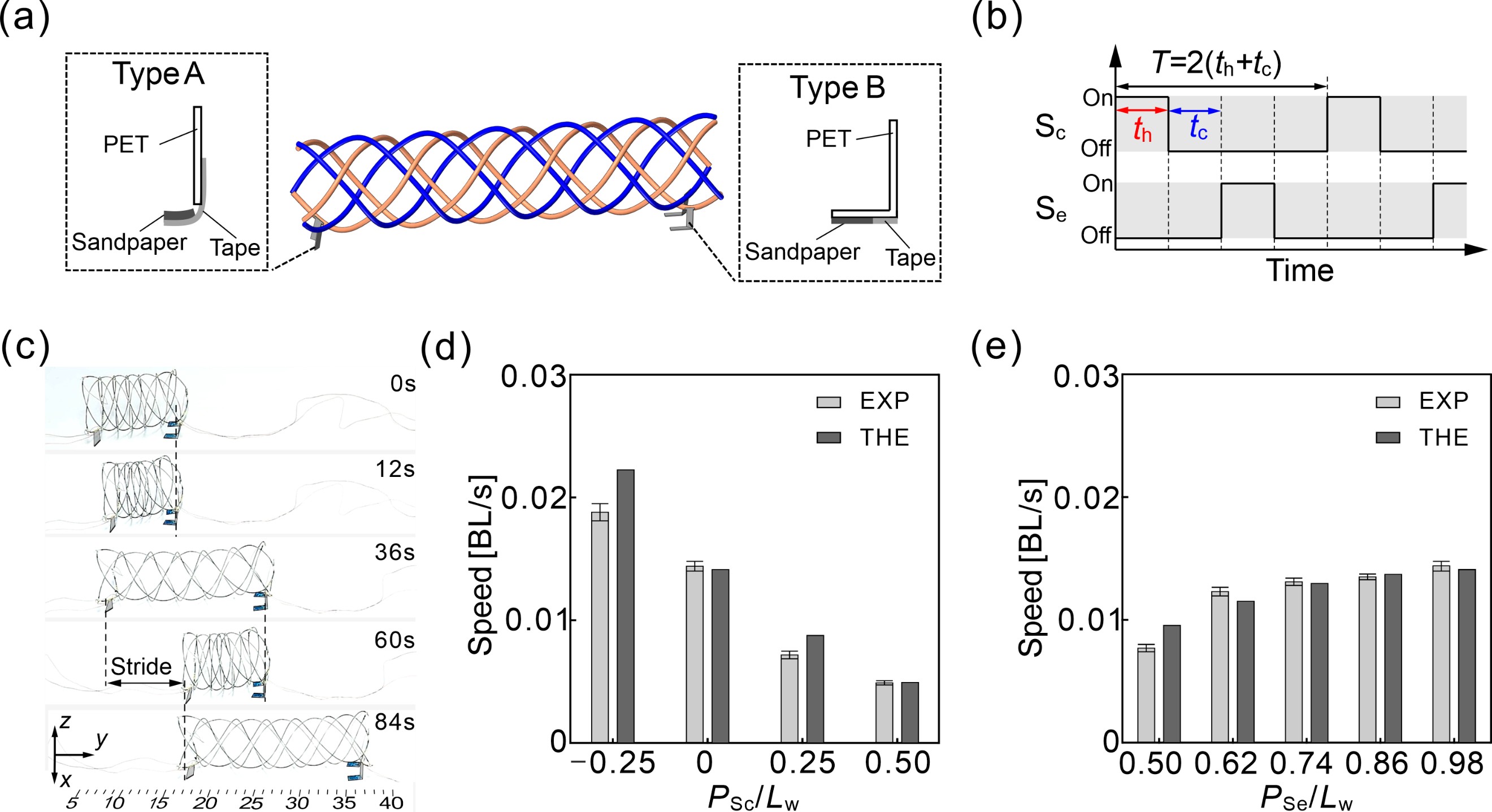
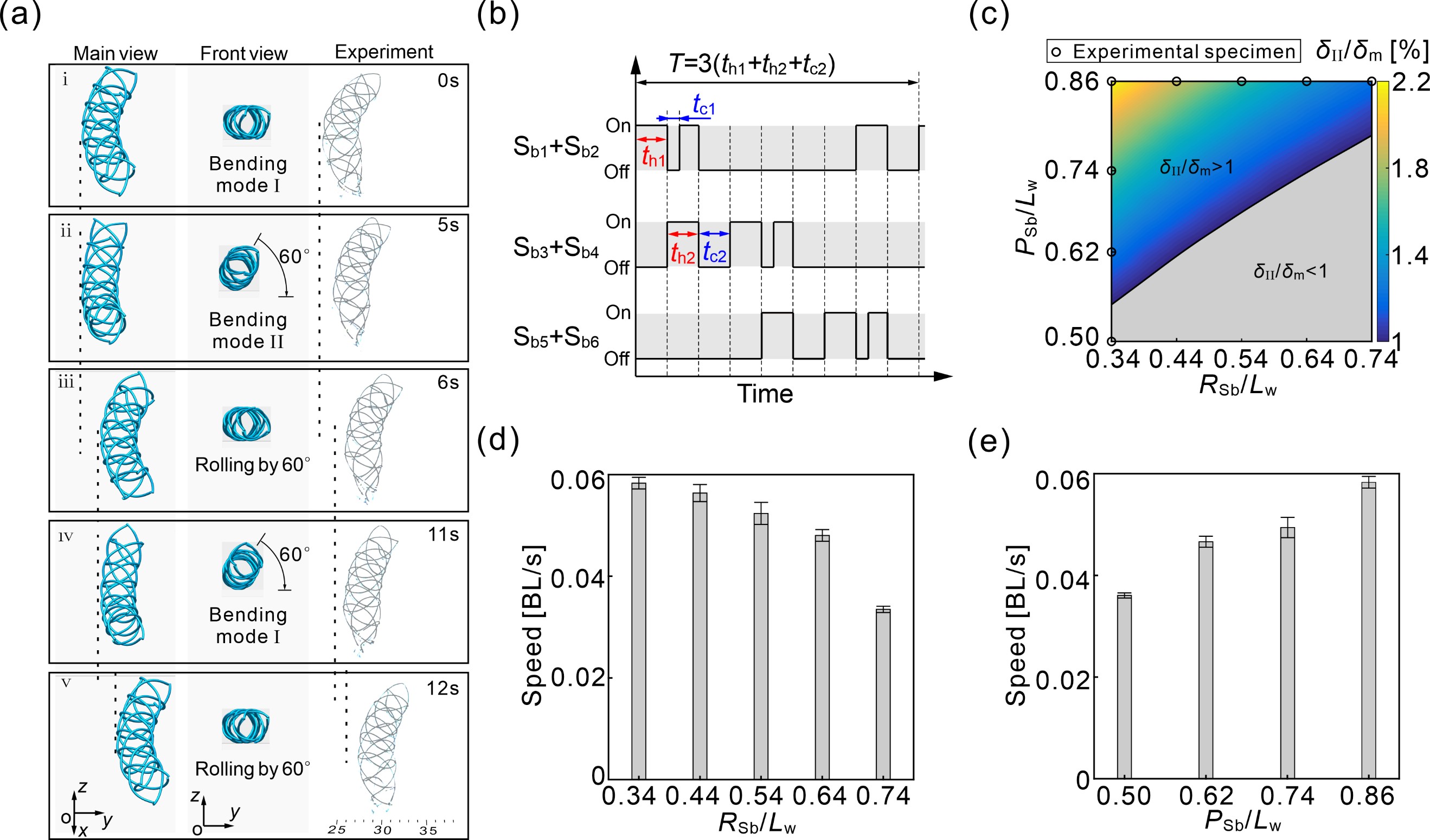
From: Date: 2025-11-14 多运动模式软体机器人具有出色的运动灵活性和环境适应性,在环境探测、搜索救援等任务中展现出巨大的应用潜力。传统设计依赖在具有多种变形模式的主体结构上配置数个驱动器或采用模块化方法来实现多样运动,系统复杂性与控制难度较高。相比之下,完全基于智能材料构建的软体机器人能直接响应外部刺激而变形,无需额外驱动器,但简单的机器人结构使其变形与运动模式受限。因此,融合智能材料特性与精巧结构设计,在简化系统的同时实现多模式变形与运动,仍是该领域面临的一大挑战。 近日,天津大学机械工程学院陈焱教授和马家耀教授团队提出了一种基于单一编织管的多模式软体机器人,通过将不同初始构型的形状记忆合金(SMA)丝巧妙编织,无需任何额外驱动器即可实现直线爬行、左/右转弯、尺蠖爬行和滚动运动。相关成果以A Multimode Soft Robot Based on a Single Braided Tube为题,于2025年11月6日在线发表于Advanced Intelligent Systems期刊。论文共同通讯作者为天津大学陈焱教授和马家耀教授,共同第一作者为天津大学博士生贾振浩和马家耀教授。该研究由国家自然科学基金和新基石科学基金资助完成。 为了实现伸缩变形,研究团队设计了两种SMA螺旋丝:Sc丝具有小螺距和大半径,而Se丝具有大螺距和小半径。多对Sc与Se丝编织成管后,系统处于初始平衡态,其中Sc丝被拉伸而Se丝被压缩。当加热Sc丝时,其模量增大会破坏原有平衡,驱动编织管轴向收缩,向着Sc丝的初始构型变形;反之加热Se丝则驱动编织管伸长。 图1 伸缩变形设计与参数分析 针对弯曲变形,团队设计了轴线弯曲的SMA螺旋丝(Sb丝)。如图2所示,6根Sb丝旋转对称编织成直管,具有两种弯曲模式:加热2根Sb丝,编织管向被加热丝弯曲方向变形(模式Ⅰ);加热4根Sb丝,编织管则向未加热丝的反向弯曲(模式Ⅱ)。通过选择性加热不同的Sb丝,编织管能朝6个方向(间隔60°)灵活弯曲。 图2 弯曲变形设计与参数分析 接下来,团队将小螺距的Sc丝和大螺距且轴线弯曲的Sb丝组合编织,在单一编织管中实现了多模式变形。加热两根Sb丝产生弯曲模式Ⅰ;加热四根Sb丝触发弯曲模式ⅠI;加热全部Sb丝实现伸长;加热Sc丝完成收缩;而同时加热Sc丝及两根Sb丝,则可实现弯曲模式Ⅰ与收缩的耦合变形。 图3 多模式变形设计
视频1 编织管的变形演示 为将伸缩变形转化为爬行运动,团队在编织管两端设计了具有各向异性摩擦的足部。利用砂纸与胶带的摩擦系数差异和交替触地实现运动:机器人伸长时后足通过高摩擦砂纸锚定,前足借助低摩擦胶带顺畅滑动;收缩时则切换为前足砂纸抓地、后足胶带前移。通过往复伸缩变形即可实现定向爬行。运动过程如视频2所示。 图4 爬行运动设计及性能分析
视频2 爬行运动 滚动运动巧妙利用弯曲导致的重心偏移。当编织管从直线状态变为弯曲时,重心偏离轴线产生重力力矩将驱动其滚动到新的平衡状态。但若仅使用单一弯曲模式,不同方向的偏移会导致机器人来回振荡。通过交替触发两种弯曲模式,机器人无需额外部件即可实现连续单向滚动。运动过程如视频3所示。 图5 滚动运动设计及性能分析
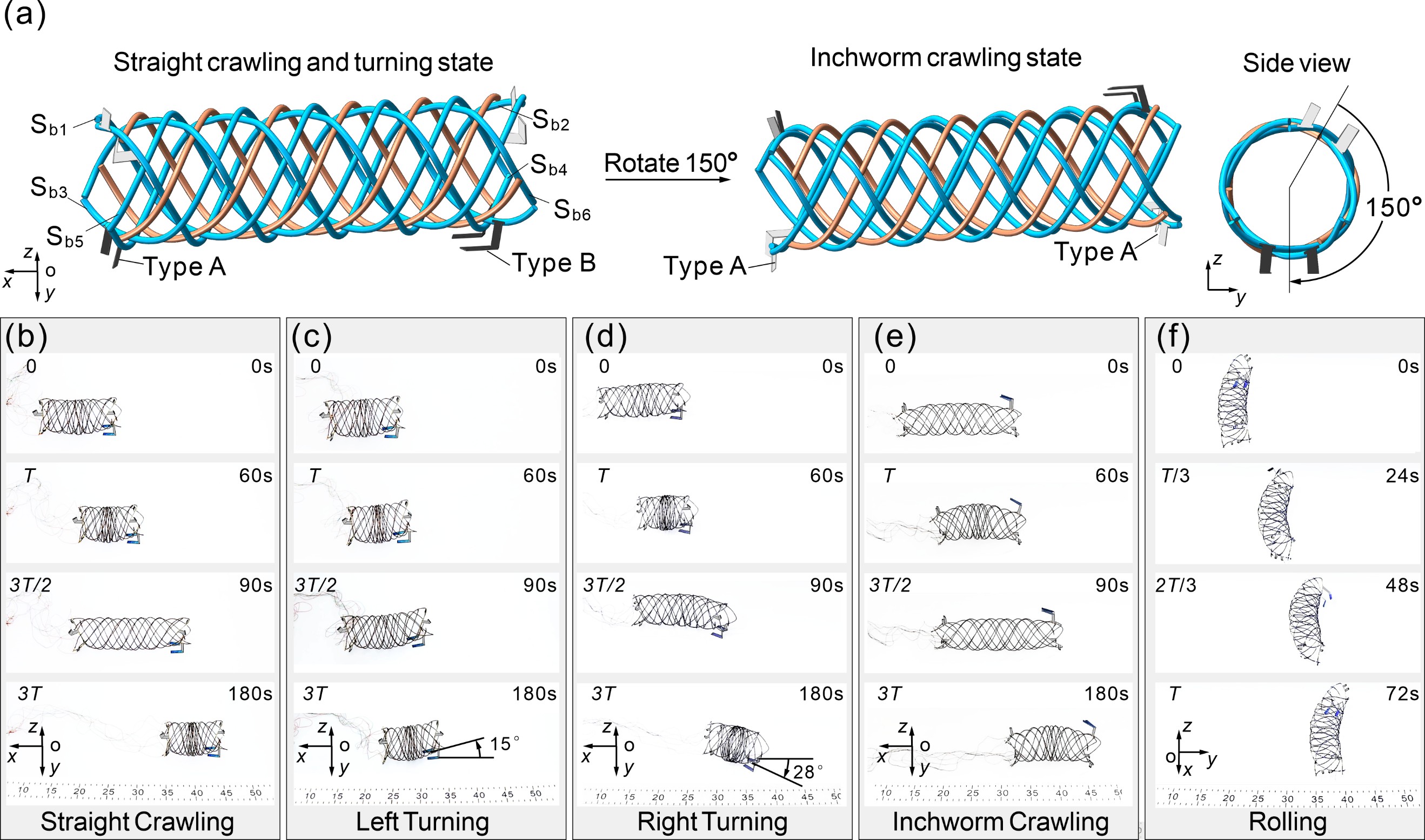
视频3 滚动运动 最后,团队在多变形模式编织管两端装配各向异性摩擦足,设计出一款无需额外驱动器即可实现复杂运动的软体机器人:伸缩变形实现直线爬行;弯曲配合伸长完成左右转向;弯曲-收缩耦合变形与伸长配合实现仿尺蠖式爬行;两种弯曲模式交替触发连续滚动。运动过程如视频4所示。 图6 多模式软体机器人运动演示
视频4 多模式运动 综上所述,此项工作提出了一种新颖的多模式软体机器人设计方法,通过组合不同初始构型的SMA丝,设计了基于单一编织管的爬行机器人、滚动机器人,及多模式软体机器人,无需任何额外驱动器即可实现多种变形与运动。此研究提出的结构驱动一体化框架,为开发高集成、自适应的软体机器人提供了设计思路。
Zhenhao Jia#, Jiayao Ma#*, Yan Chen*. A Multimode Soft Robot Based on a Single Braided Tube. Advanced Intelligent Systems, 2025, e202500777. |