|
最新论文——Journal of Mechanisms and Robotics | 顾元庆博士发表三重对称Bricard机构网格的约束消减
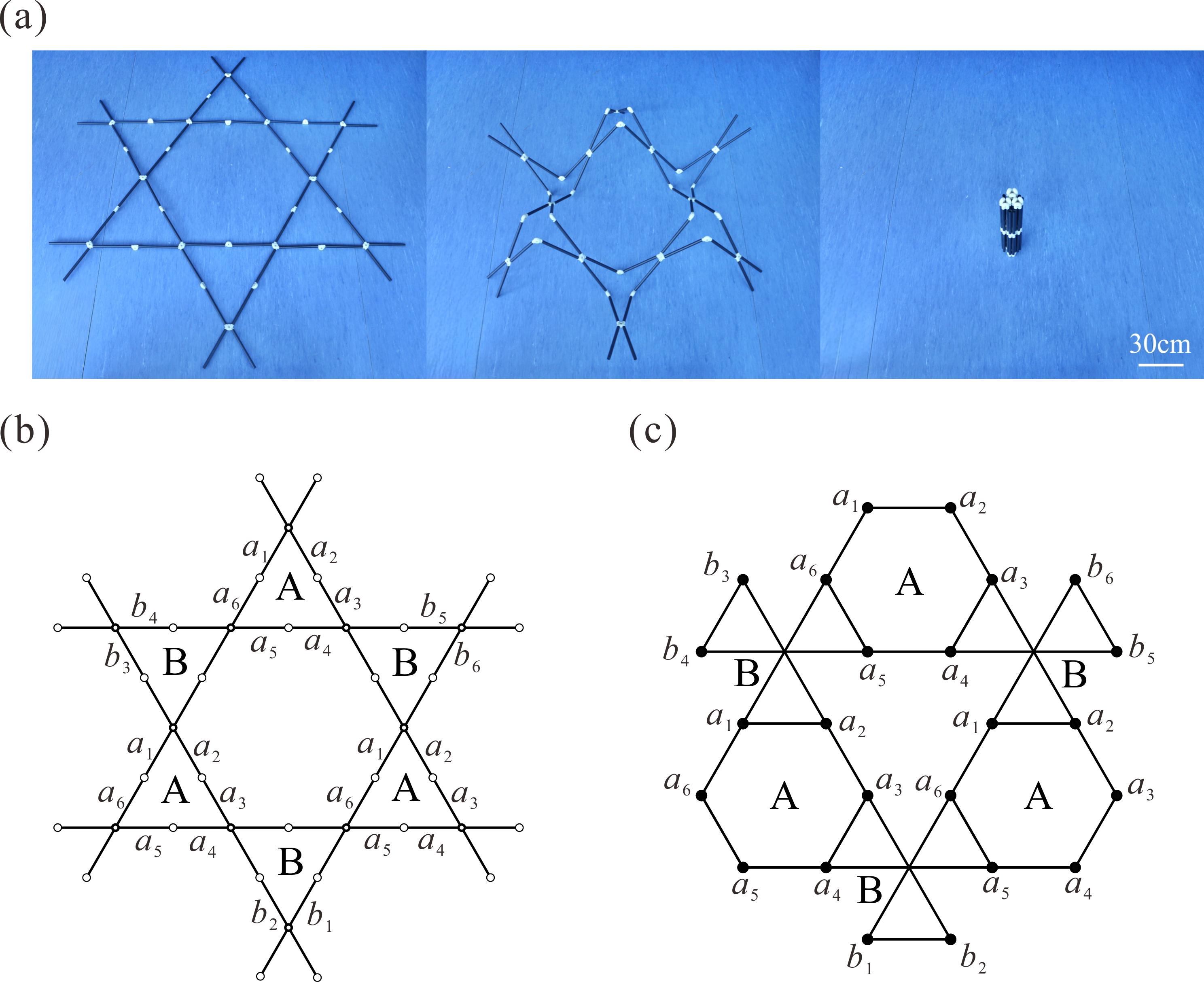
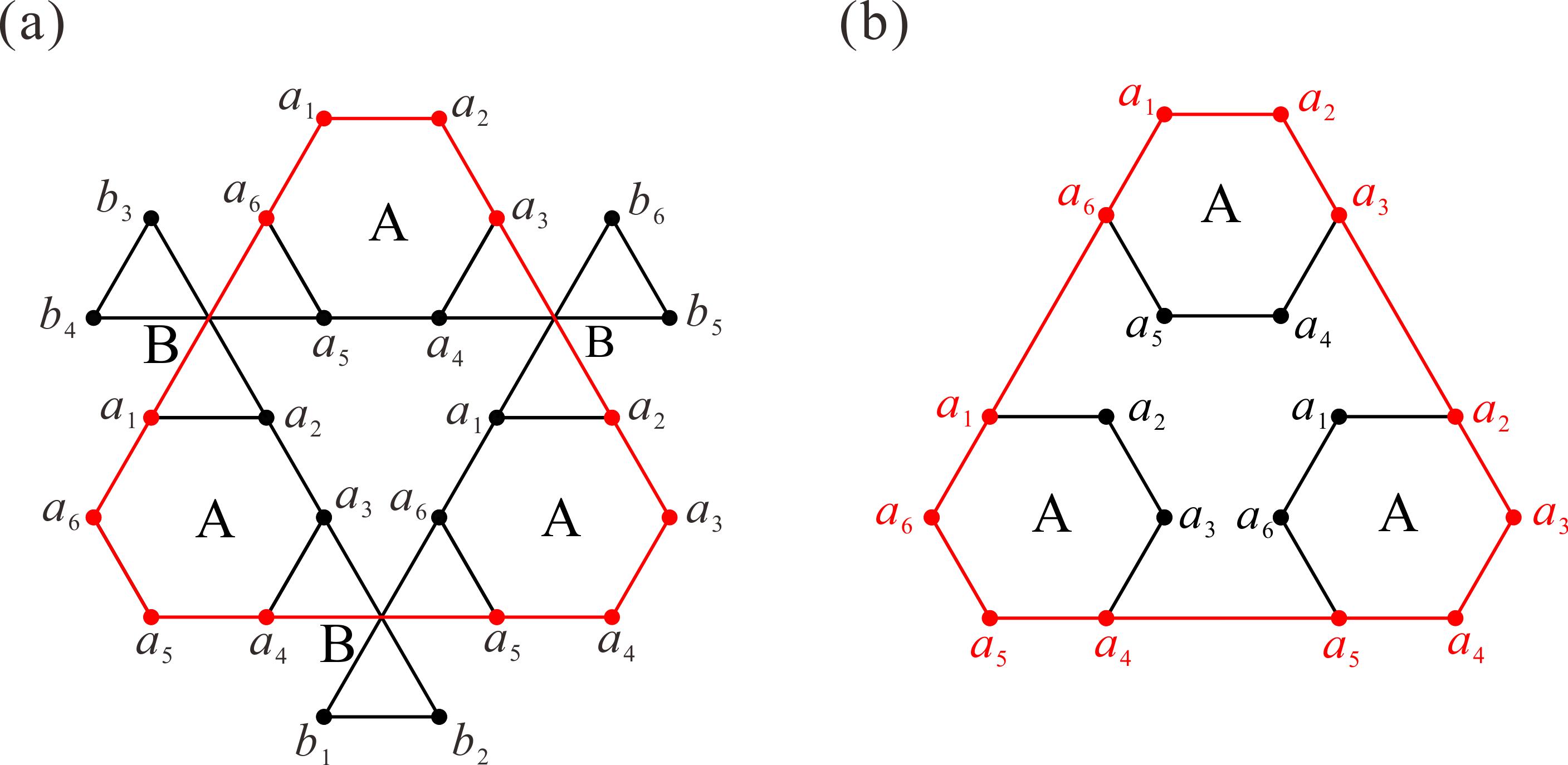
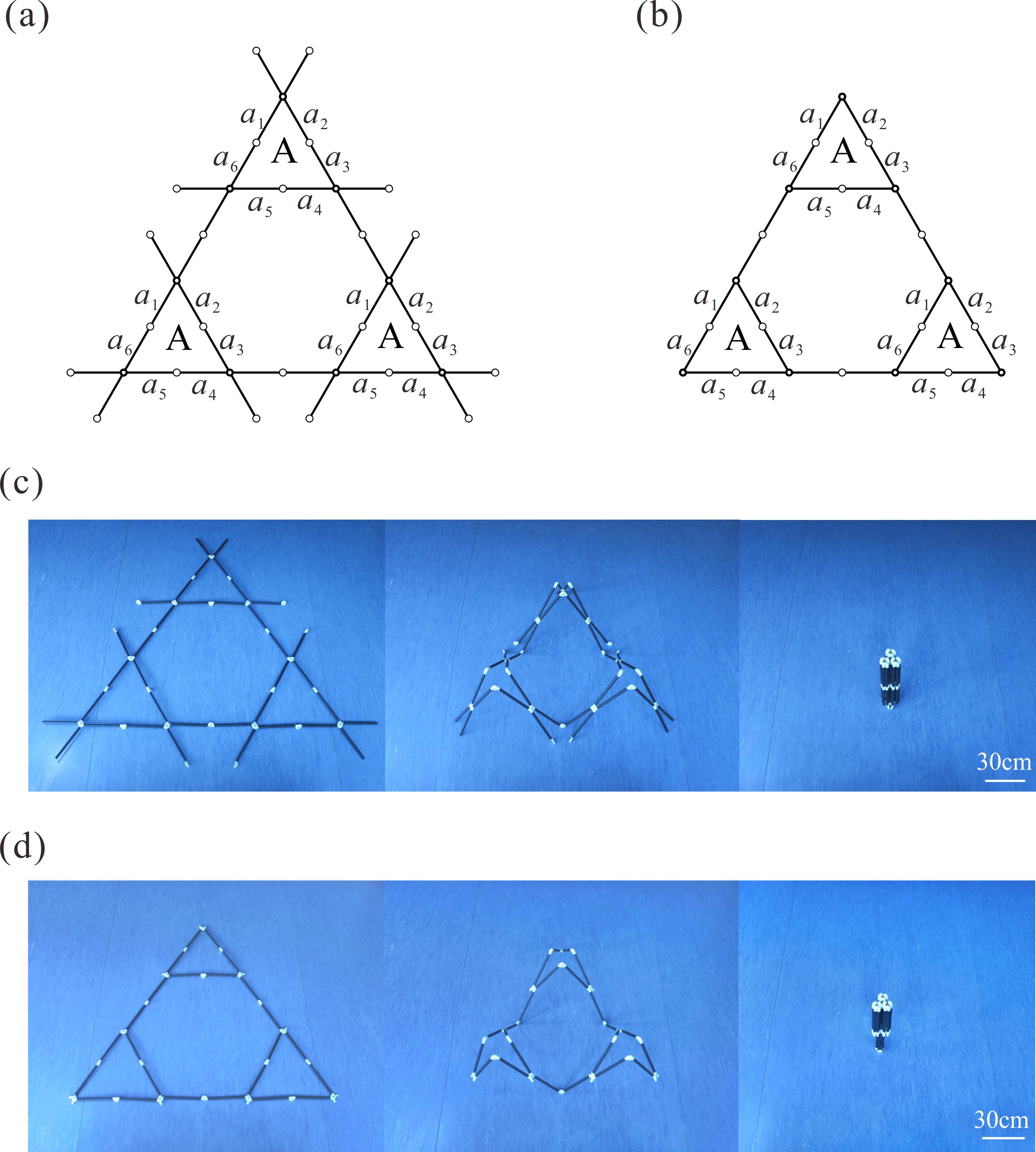
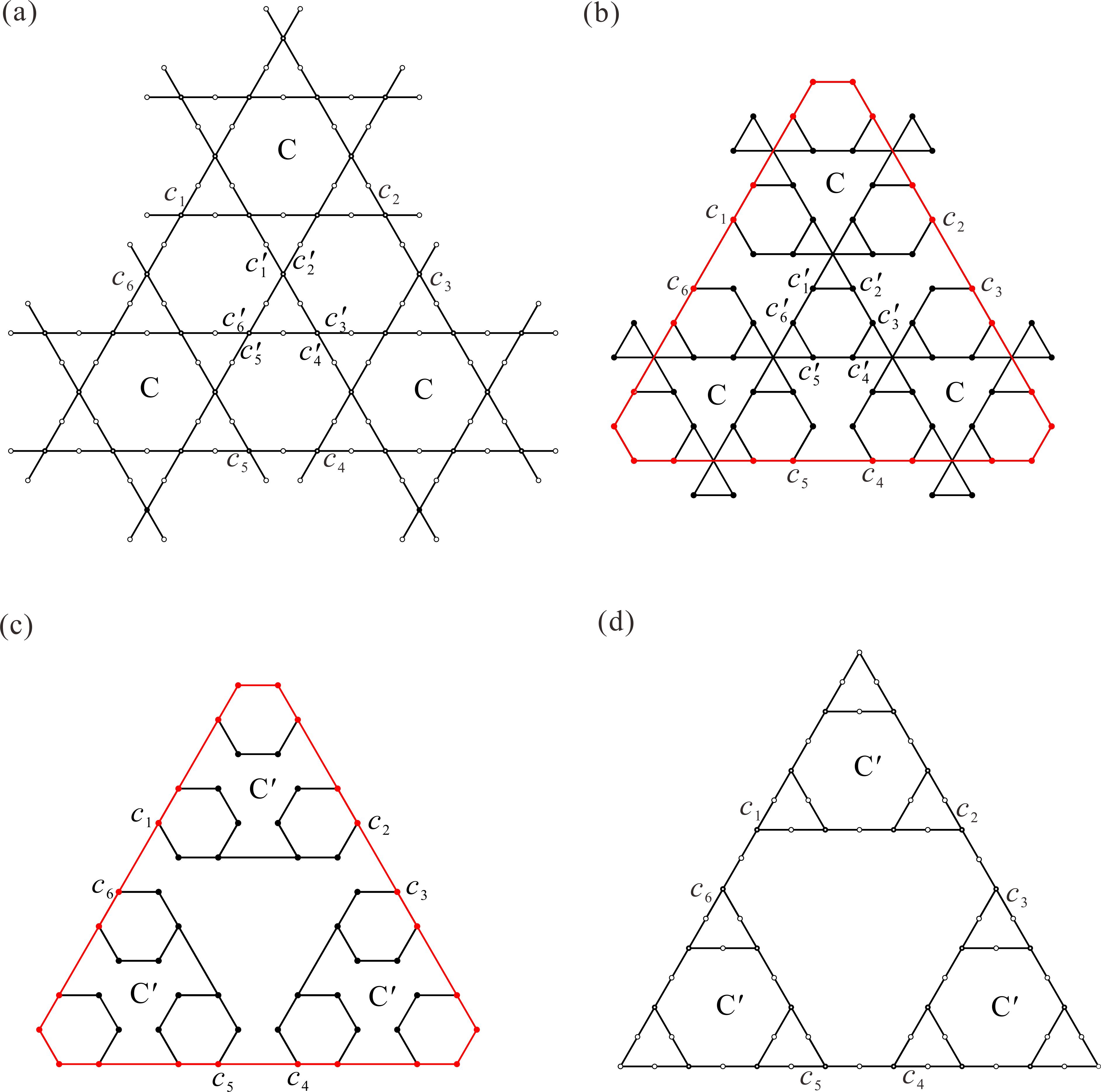
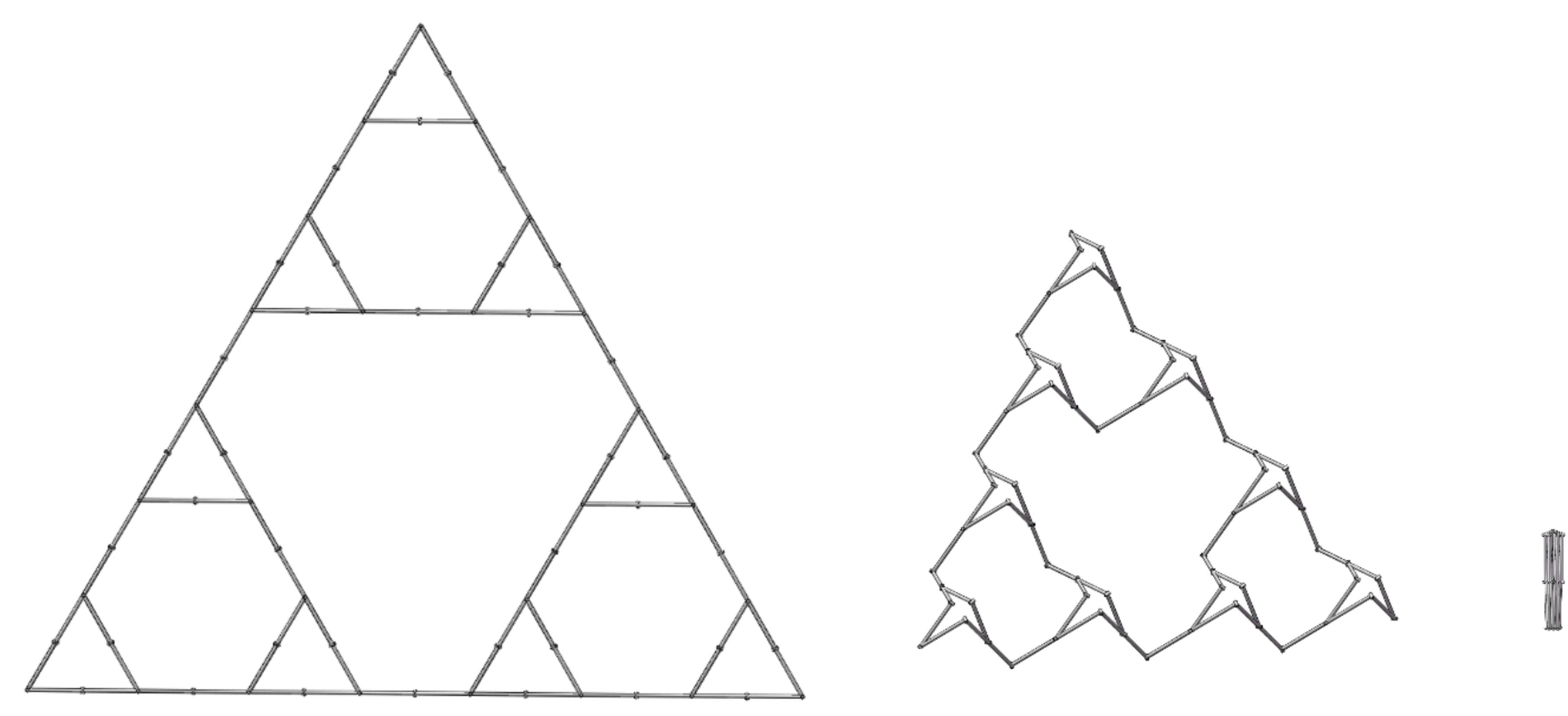
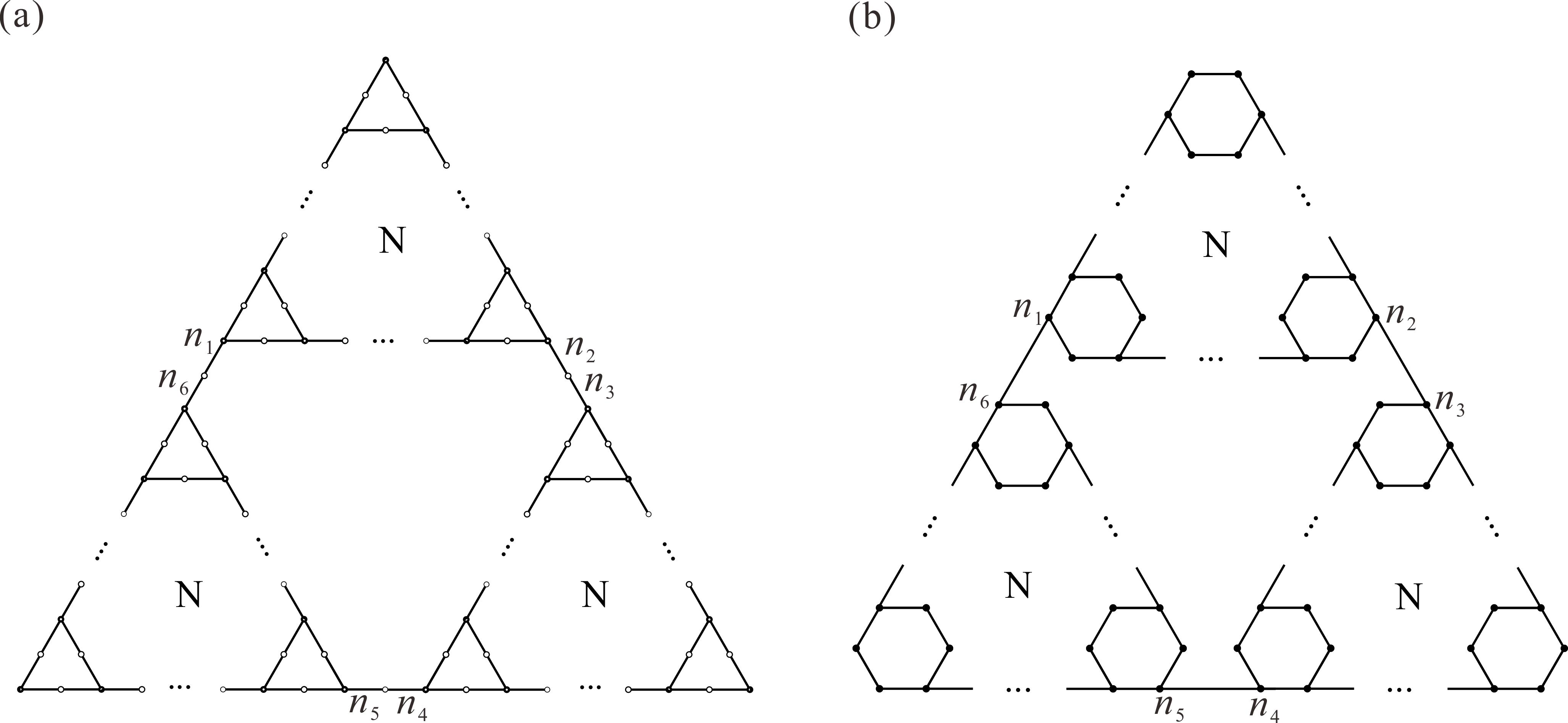
From: Date: 2026-03-11 过约束机构可以用较少的刚性杆件实现大折展比的运动并能获得更高的刚度,在大型空间折展结构设计方面具有广阔的应用前景。然而,过约束机构网格中的理想几何约束条件难以得到满足,大量过约束的存在会产生附加内部载荷,致使折展结构运动不畅甚至不能运动,降低了折展结构的可靠性。因此,通过运动学策略将原有过约束机构网格降阶为少过约束机构网格并保持原有的折展运动仍然是一大难题。 近日,天津大学机械工程学院陈焱教授团队以三重对称Bricard机构网格为研究对象,在折展运动不变的前提下进行机构拓扑简化操作,构建了具有运动等价特性的单自由度少过约束机构网格。该成果于2026年2月24日在线发表于Journal of Mechanisms and Robotics期刊,论文通讯作者为天津大学陈焱教授,第一作者为天津大学博士后顾元庆。该研究由国家自然科学基金、腾讯基金(科学探索奖)资助完成。 以三重对称Bricard机构为基本单元,基于机构网格运动协调理论与几何覆盖的方法,可构建出如图1所示的单自由度机构网格。由机构简图与拓扑图可知,该单自由度机构网格中存在24个杆件与30个转动副,其中的过约束数为13。 图1 单自由度三重对称Bricard机构网格 在此基础上,通过机构变拓扑策略来实现多环路机构网格的过约束消减。首先提出机构网格的消减前提条件:(1)包括自由度在内的机构运动学特性不发生改变;(2)展开后外轮廓几何尺寸基本不变;(3)拓扑图中的每个点至少需要两个连线以构成闭环机构。为此,引入了哈密尔顿路径这一数学概念,如图2a红线所示。通过机构网格的拓扑图可以观察到,简化前提主要包含了三个A机构,仅涉及到了每个B机构的一个铰链,因此尝试去除三个B机构处的冗余杆件和铰链。化简后的拓扑图如图2b所示,仅包含3个A机构且相邻机构间仅通过一个铰链连接。 图2 机构网格的拓扑消减 将拓扑图映射至机构简图,图3a 展示了去除冗余约束后的少过约束机构网格,其展开面积基本不变。在此基础上,还可得到具有规则几何外形的少过约束机构网格 (图3b)。利用旋量理论对简化后的机构网格进行自由度验证,证明了少过约束机构网格保留了原始的单自由度三重对称运动特性,实现运动等价的同时将机构网格中的过约束数由13降为4(折叠过程如图3c和图3d所示)。 图3 约束消减后的单自由度三重对称Bricard机构网格 利用图1中的原始机构网格作为构建单元C,可构建出如图4a所示的大型Bricard机构网格,同样展现出单自由度三重对称运动特性。基于上述约束消减策略,大型机构网格的拓扑图以及消减前提(红线) 如图4b所示,以保证简化后的大型机构网格展开工作面积基本不变。接着,基于构建单元C的少过约束形式 (图2b),将此大型网格中的三个构建单元C分别简化为单自由度少过约束构建单元C’ (图4c),最终构建出图4d所示的大型少过约束Bricard机构网格。其中,相邻的单自由度少过约束构建单元之间仅通过一个转动铰链进行连接,获得的大型网格也同样保持了原始的单自由度三重对称运动特性(图5),且过约束数由原始的55降为13。此外,所提出的约束消减策略还可拓展至多级超大型Bricard机构网格,如图6所示,通过去除机构网格内部的大量冗余约束使其过约束程度显著降低。 图4 大型Bricard机构网格的约束消减 图5 大型少过约束Bricard机构网格的折叠过程 图6 多级Bricard机构网格的约束消减 综上所述,此工作基于机构变拓扑方法提出了一种复杂机构网格的约束消减策略,构建了三重对称Bricard机构网格的少过约束形式,并保持了原有的单自由度三重对称运动特性。本文通过改变机构的拓扑构型,构造与原机构网格运动等价的新机构网格,为降低机构网格的过约束程度提供了思路,也为少过约束机构网格在大型空间可展开结构方面的应用提供理论基础与技术储备。
Yuanqing Gu, Jiayao Ma, Yan Chen*. Overconstraint reduction for mechanism networks of threefold-symmetric Bricard linkages. Journal of Mechanisms and Robotics. 2026, 18(4): 044501. |