|
南洋理工大学Guo Zhan Lum教授访问天津大学可动结构实验室
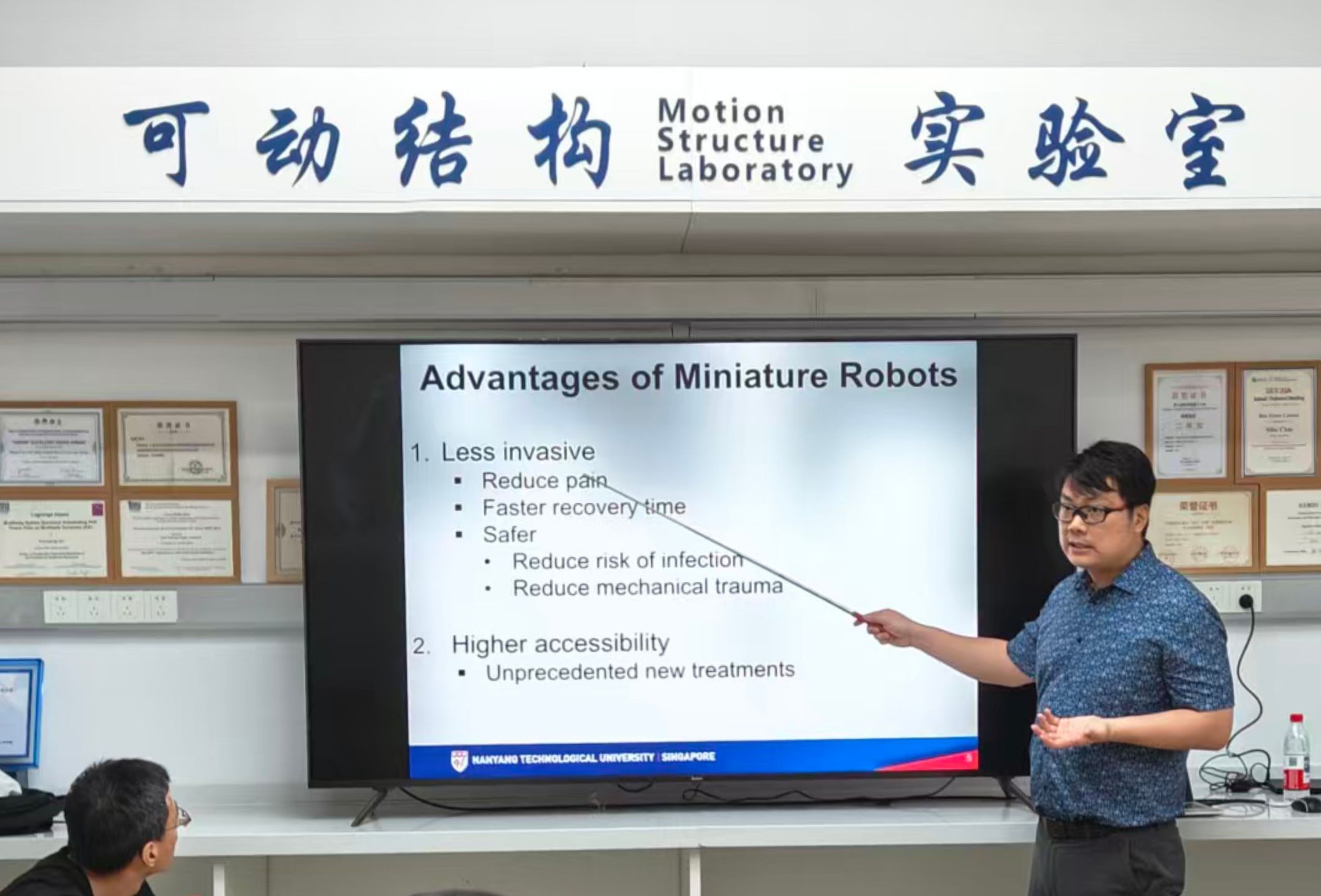
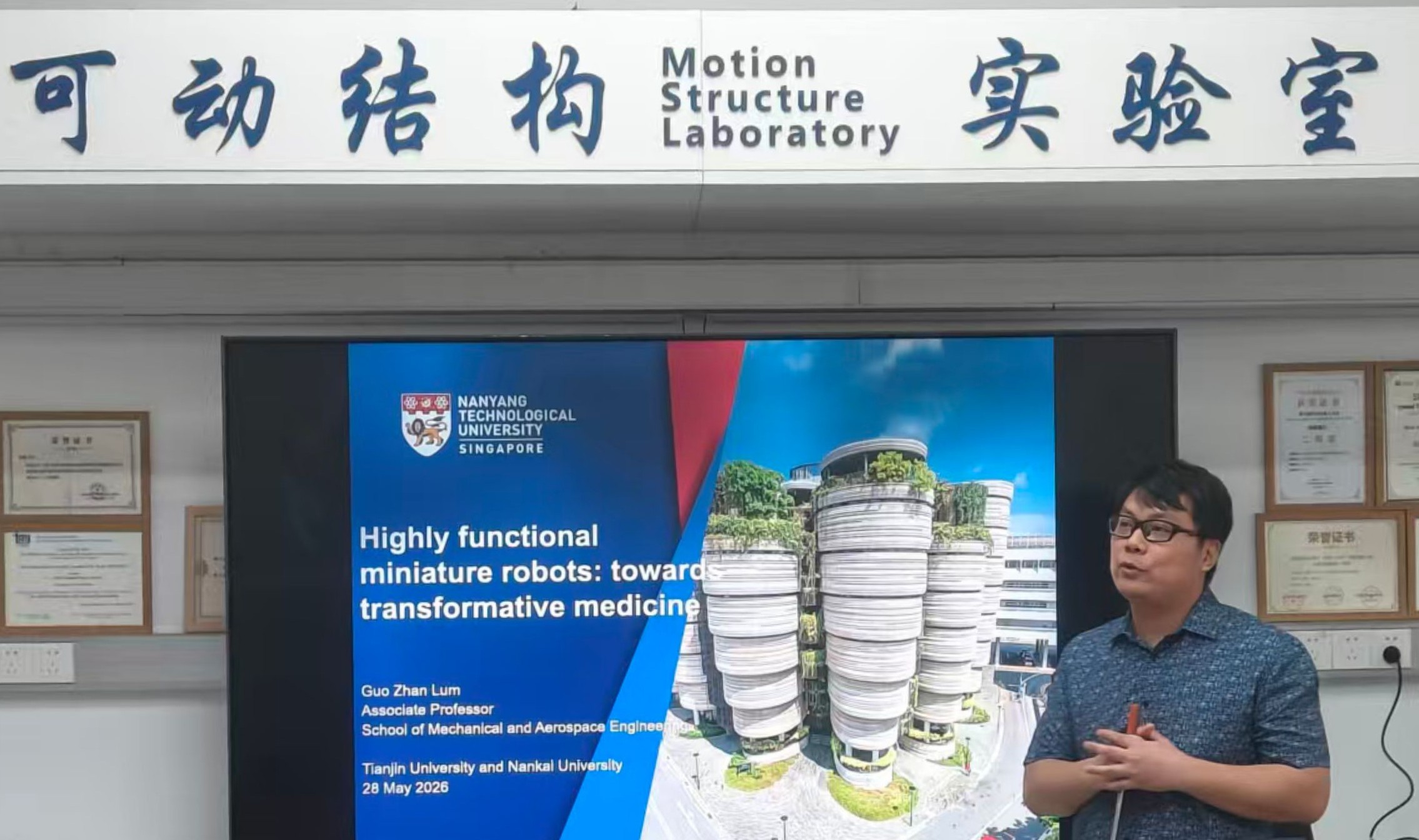
From: Date: 2026-06-01 2026年5月28日,应天津大学陈焱教授邀请,来自南洋理工大学的Guo Zhan Lum教授访问了天津大学可动结构实验室,并为大家带来了题为"Highly functional miniature soft robots: towards transformative medicine"的精彩学术报告。 Lum教授在报告中介绍了微型磁性软体机器人(Magnetic Miniature Robots, MMRs)在变革性医疗领域的最新研究进展。报告指出,磁性微型机器人作为可由磁场控制的无缆小型驱动器,能够无创进入高度受限和封闭的空间,在机器人学、材料科学和生物医学领域具有巨大的应用潜力。然而,当前微型机器人多为五自由度,在磁矩向量上难以用外部磁场进行有效控制,且缺乏软体功能,这些关键瓶颈限制了其广泛应用。Lum教授团队创新的磁铁设计与加工方法成功实现了六自由度控制,并可使最优设计的微型机器人产生比现有小型磁性驱动器大51至297倍的六自由度扭矩。团队还提出了一种适用于刚性和软体微型机器人的通用六自由度驱动方法,在精确姿态控制下,最优微型机器人能够可靠地执行完整的六自由度运动,六自由度角速度可达173度/秒。团队研发的软体微型机器人展现了前所未有的功能:六自由度水母状机器人能够穿越现有同类设备无法通过的障碍;六自由度夹持器在完成复杂小规模装配任务时比其五自由度前代快20倍。此外,团队还开发了一种可编程药物释放序列和剂量的软体微型机器人,能够实现四种药物的精准递送,为靶向联合治疗提供了全新方案。在最新研究中,团队进一步创造了可根据需求磁编程执行药物释放、切割、抓取、储存生物组织及热疗等功能的微型机器人,有望使未来的微创治疗更加安全无痛。 Guo Zhan Lum教授于2016年获得南洋理工大学和卡内基梅隆大学双博士学位,2016至2017年在德国马克斯·普朗克智能系统研究所从事博士后研究。自2018年起,Lum教授加入南洋理工大学任教,现为该校终身副教授。截至目前,Lum教授已在Nature、PNAS、Advanced Materials、Science Advances等顶级期刊发表论文21篇,其中多篇被选为Advanced Materials期刊封面。Lum教授的研究成果被BBC、纽约时报、华尔街日报等130余家国际媒体报道。2025年,Lum教授与Metin Sitti教授合作的Nature论文荣获国际基础科学大会(ICBS)颁发的"科学前沿奖"(Frontiers of Science Award)。其研究方向涵盖微型机器人、软体机器人、磁驱动系统及生物医学应用等领域。 |