|
New Publication: Vertex-Splitting on a Diamond Origami Pattern
From: Date: 2019-10-07 Origami is an ancient art, transforming a paper sheet into a three-dimensional structure. Due to the superiorly foldable properties, it has great potential for various engineering fields, such as deployable structures, robotics, architectures and materials. Rigid origami is a special type of origami, where its creases and facets can be regarded as hinges and rigid links, respectively. Hence, a single-vertex rigid origami consisting of at least four creases meeting at one point can be considered as a spherical linkage. A rigid origami pattern with a lot of vertices forms a mobile assembly of spherical linkages. According to the mobility of the assembly, rigid origami can be classified into two groups, one-DOF origami and multi-DOF origami. The multi-DOF origami generally consists of the six-crease origami vertex and the five-crease origami vertex. As multi-DOF origami patterns can be deployed to variable configurations, they have been widely used in morphing robots. However, sometimes one motion characteristic is needed, it is a challenge to accurately control a multi-DOF origami system. Reducing the DOF of multi-DOF origami patterns and obtaining one-DOF origami patterns with the equivalently and symmetrically kinematic property are the main objectives.
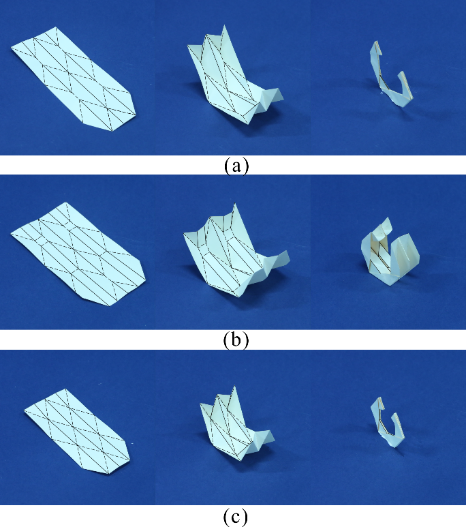
(a) The one-DOF origami pattern with four- and six-crease vertices, (b) the one-DOF origami pattern with four-, five-, and six-crease vertices, (c) the multi-DOF diamond origami pattern.
The research result was accepted by Journal of Mechanisms and Robotics of ASME on 4th March 2019 and published in volume 11, issue 3 in June 2019. (DOI: 10.1115/1.4043214)
|