Deployable structures are a unique class of engineering structures and an interdisciplinary research field in between mechanism and structure design. Unlike conventional mechanisms or structures, they are able to change their size and shape like mechanisms to accommodate different operation requirements, whilst still providing adequate load bearing capacity like structures, and are key to the design of numerous equipment in fields including aerospace and civil engineering. Our laboratory focuses on deployable structures based on spatial mechanisms including spatial linkages, rigid origami and thick panel origami. Differing from flexible deployable structures, we employ mechanism design to realize the efficient folding of rigid components solely using revolute joints.
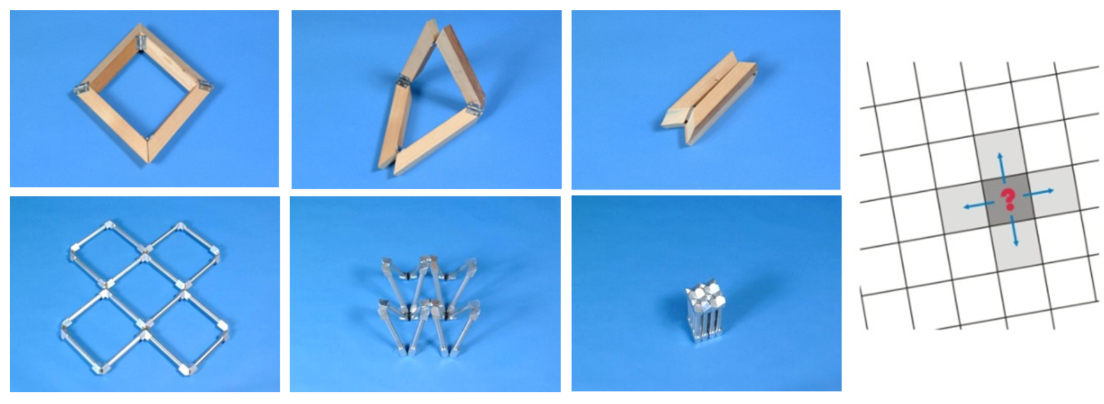
By solving for a series of highly nonlinear constraints including geometric and kinematic compatibility, we proposed a new systematic design methodology for deployable structures — tessellation. This approach employs over-constrained spatial mechanisms as basic mechanism units and constructs large deployable structures based on planar or spatial tessellation under mechanism constraint conditions. By this means, all designs that satisfy tessellation conditions can be obtained. Spatial arrangement of mechanism units often follows that of polygon and polyhedral tessellation and includes periodic arrays in one or many directions. The mechanism units include spatial linkages, as well as rigid and thick panel origami, the design of which not only needs to satisfy kinematic compatibility within the unit, but also must be compatible with adjacent units and ensure overall kinematic compatibility of the entire array. Tessellation is an effective tool to expand basic mechanism units to deployable structures of arbitrary scale.
Construction of a large deployable structure through tessellation of a Bennett linkage mechanism unit
Zhong You and Yan Chen, Motion Structures: Deployable Structural Assemblies of Mechanisms, Taylor and Francis, ISBN: 978-0-415-55489-3, 2011. [PDF]
2 Deployable structures based on spatial linkages
By considering their kinematic properties and tessellating over-constrained spatial linkages such as the Bennett linkage, the Myard linkage and the Bricard linkage, which are spatial 4R, 5R and 6R linkages, a series of single-degree of freedom (DOF) over-constrained large deployable structures with redundant stiffness and only revolute joints were generated. The single kinematic loop compatibility conditions of units are first satisfied to form single-DOF units under redundant constraints. Tessellating of these units is then accomplished to satisfy kinematic compatibility conditions for adjacent units with shared joints. The resulting designs are structurally simple, easy to control, can be compactly folded for storage and transportation, and can be deployed into large-scale planar, cylindrical, or saddle surfaces which satisfy certain functions and are applicable as supporting trusses for mesh antennas in the aerospace field.
Deployable saddle surface based on the Bennett linkage
Spatial deployable structurebased on the Myard linkage
Deployable planar structure based on the Bricard linkage
Yan Chen, Zhong You*. Mobile assemblies based on the Bennett linkage. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2005, 461, 1229 – 1245. (http://dx.doi.org/10.1098/rspa.2004.1383)
Yan Chen, Zhong You, Tibor Tarnai*. Threefold-symmetric Bricard linkages for Deployable Structures. International Journal of Solids and Structures, 2005, 42 (8) 2287-2301. (http://dx.doi.org/10.1016/j.ijsolstr.2004.09.014 )
3 Deployable structures based on thick panel origami
Using thick panel origami as the basic units for deployable structure construction and employing the tessellation method, it is possible to form planar, cylindrical, doubly-curved and multi-layer deployable structures, with use as deployable solar arrays, solid-surface antennas and other aerospace applications. Answering to requirements for planar antennas, isosceles triangle thick panels were adopted and combined with hinge offset as well as kirigami cuts in order to construct a 2-DOF 8R mechanism unit. The criteria for single-DOF coordinated motion between connected 2-DOF units were then proposed, creating planar deployable structures. Addressing requirements for cylindrical surface antennas, two 4-crease thick panel origami units were adopted and connected using spherical 4R mechanisms and Bennett linkages, forming two flat surfaces placed at an angle. Removing regions of the material then created a parabolic cylinder surface. Finally, removal of redundant hinges using kinematic equivalence gave rise to a cylindrical deployable structure. Similarly, for requirements of paraboloid reflectors, thick panel origami units were tessellated in the circumferential direction to create a conical prism and removal of material formed a doubly-curved deployable structure. According to requirements for high stiffness and high surface accuracy in deployable antennas, 4-crease thick panel origami was used to design an array with rectangular panels, and tubular 4-crease thick panel origami was adopted to design a supporting truss with coordinated kinematics with that of the surface array. Hinge removal and lightweight design then gave rise to a multi-layer deployable structure.
Uniform-thickness deployable planar array based on thick panel origami
Parabolic cylinder deployable antenna based on thick panel origami
Paraboloid deployable antenna based on thick panel origami
Deployable array with rectangular surface panels and a supporting truss
Jingyi Yang, Xiao Zhang, Yan Chen, Zhong You, Folding arrays of uniform-thickness panels to compact bundles with a single degree of freedom. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2022, 478: 20220043. (http://doi.org/10.1098/rspa.2022.0043)
Yuehao Zhang#, Ming Li#, Yan Chen, Rui Peng, Xiao Zhang*. Thick-panel origami-based parabolic cylindrical antenna. Mechanism and Machine Theory, 2023, 182: 105233. (https://doi.org/10.1016/j.mechmachtheory.2023.105233)
Chenjie Zhao#, Ming Li#, Xin Zhou, Tianming Liu, Jian Xing, Yan Chen, Xiao Zhang*. Deployable structure based on double-layer miura-ori pattern. Mechanics Research Communications, 2023, 131, 104152. (https://doi.org/10.1016/j.mechrescom.2023.104152)
4 Deployable structures based on polyhedrons
Applying origami mechanisms and spatial linkages to polyhedrons leads to the creation of deployable polyhedron structures. On one hand, through studying spatial multi-loop linkages and their kinematic compatibility and incorporating the truss method, a design approach for single-DOF transformable polyhedrons was proposed and used to design transformations between the cuboctahedron (a 14-faced polyhedron enclosed by 8 triangles and 6 quadrilaterals) and the octahedron, the truncated octahedron (a 14-faced polyhedron enclosed by 8 hexagons and 6 quadrilaterals) and the cube, as well as the truncated tetrahedron (8-sided polyhedron enclosed by 4 triangles and 4 hexagons) and the tetrahedron, and on the other hand, through combining solid geometry and mechanism kinematics, we establish a design criterion for deployable polyhedral mechanisms based on spatial symmetries and different mechanism units, creating a series of novel 1-DOF radial-deployable polyhedral mechanisms from spherical 4R, spatial 7R and Sarrus mechanisms, with engineering applications including medical capsule robots and modular micro-satellites. In addition, by introducing rotational symmetric creases and cuts into thick panel prism structures, a three-state deployable prism with a prism state, a fully deployed state and a fully folded state was created. Further design of elastic hinges led to a multi-stable deployable polyhedron structure with applications as reconfigurable 5G antennas and reconfigurable architecture.
Deployable polyhedron structure
Radial-deployable polyhedral mechanisms based on spherical 4R, spatial 7R and Sarrus mechanisms
Flat-foldable deployable prismatic structure
Fufu Yang, Zhong You, Yan Chen*. Mobile assembly of two Bennett linkages and its application to transformation between cuboctahedron and octahedron. Mechanism and Machine Theory, 2020, 145: 103698. (https://doi.org/10.1016/j.mechmachtheory.2019.103698)
Xiao Zhang, Jiayao Ma, Mengyue Li, Zhong You, Xiaoyan Wang, Yu Luo, Kaixue Ma, Yan Chen*. Kirigami-based metastructures with programmable multistability, Proceedings of the National Academy of Sciences of the United States of America, 2022, 119(11): e2117649119. (https://doi.org/10.1073/pnas.2117649119)
5 Engineering applications of deployable structures
Typical engineering applications of deployable structures include deployable arrays in the aerospace field and deployable architecture in the civil engineering and architecture field, where it provides efficient folding and stowage as well as functional form reconfiguration. Rigid deployable structures based on spatial linkages and rigid thick panel origami are formed completely by rigid components and often have single-DOF mechanism kinematics, while non-rigid deployable structures based on origami similarly fold into compact states along deterministic paths with strain concentrated at creases. These deployable structures typically have advantages including convenient manufacture, transport and deployment, as well as repeatable deployment. Example applications include large deployable arch structures, uniform thickness planar arrays based on thick panel origami, reconfigurable architecture capable of switching between closed and open forms, modular architecture capable of compact stowage and modular expansion, as well as compactly foldable inflatable origami cylinders.
Large deployable arch structure based on spatial linkages
Thick panel origami deployable array based on the plane linkage
Thick panel deployable array based on hexagonal origami
Reconfigurable architecture based on the flat-foldable prism structure
Modular foldable architecture based on rigid origami
Inflatable deployable cylinder based on Kresling origami
Xuesong Chen, Huijuan Feng, Jiayao Ma, Yan Chen*. A plane linkage and its tessellation for deployable structure. Mechanism and Machine Theory, 2019, 142: 103605. (https://doi.org/10.1016/j.mechmachtheory.2019.103605)
Mengyue Li, Zhiyong Zhou, Baoxin Hao, Chenfan Yu, Yan Chen, Jiayao Ma*. Design and deformation analysis of an inflatable metallic cylinder based on the Kresling origami pattern. Thin-Walled Structures, 2023, 188: 110859. (https://doi.org/10.1016/j.tws.2023.110859)