Our laboratory has carried out research on various types of robots. The design concept is to simplify the structures and driving methods of the robots while meeting functional requirements. To achieve this, we introduced smart materials, deployable structures, and biomimetics in the design of robots.
1 Film robots driven by constant humidity
Soft robots developed based on smart materials can respond to environmental stimuli such as light, heat, magnetism, and humidity to perform specific movements and functions. This has become a research hotspot in the field of robotics. One of the key challenges in the design of such soft robots is how to achieve fast movement and multifunctionality in a constant external environment, without human intervention, while integrating the robot's structure, actuators, and power sources.
To address this challenge, through interdisciplinary collaboration, we have developed a soft robot, Hydrollbot, which utilizes the humidity-sensitive properties of agarose (AG) films to achieve continuous and rapid motion under constant humidity conditions. This robot overcomes the issues of isotropy and random bending in the film through structural design, achieving a linear motion speed of 0.714 BL/s. This speed is two orders of magnitude higher than that of previously reported humidity-driven robots, and it can carry its own weight (100% load) while enabling programmable motion trajectories.
Trajectory programmable robot 'Hydrollbot'
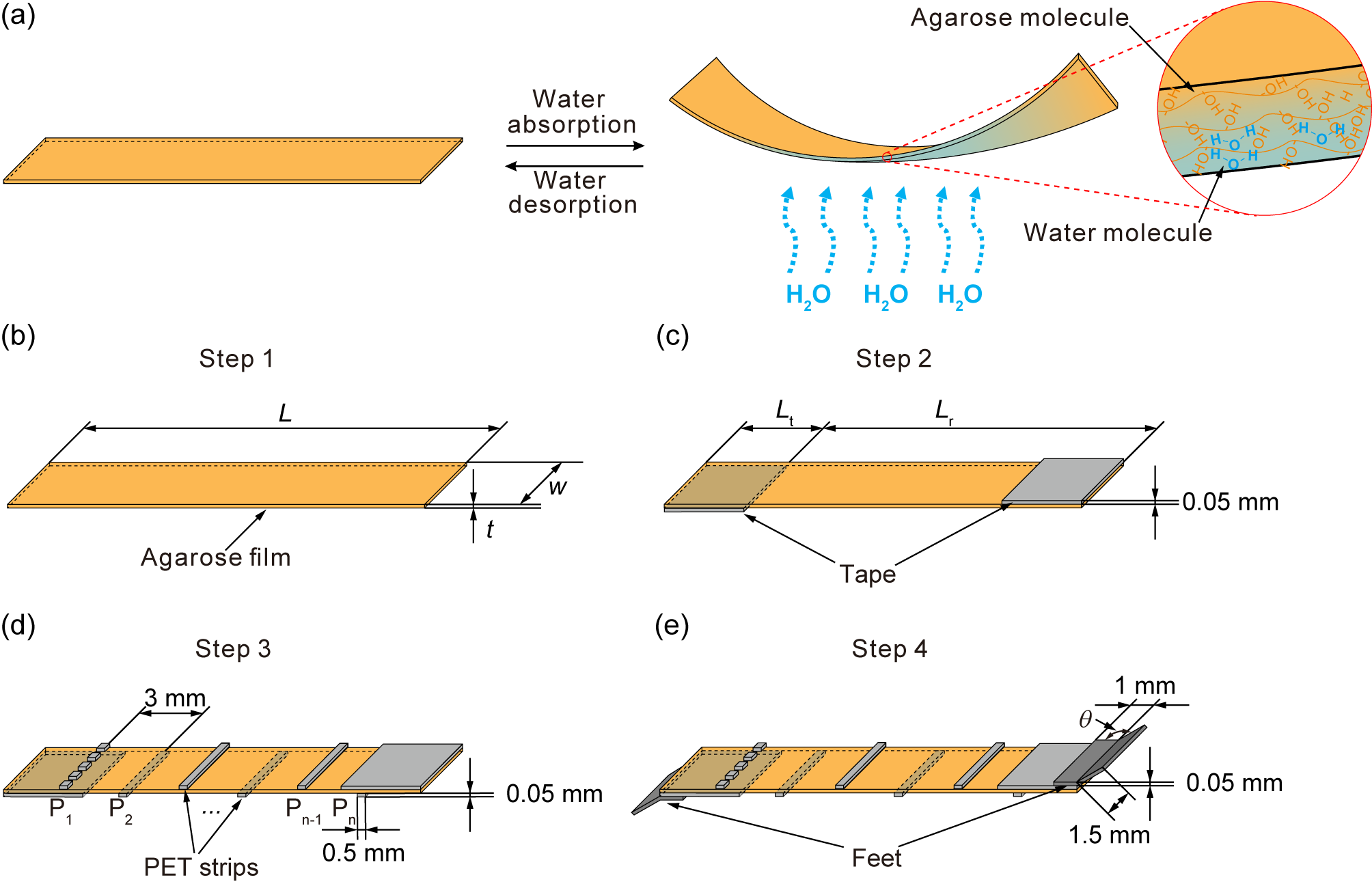
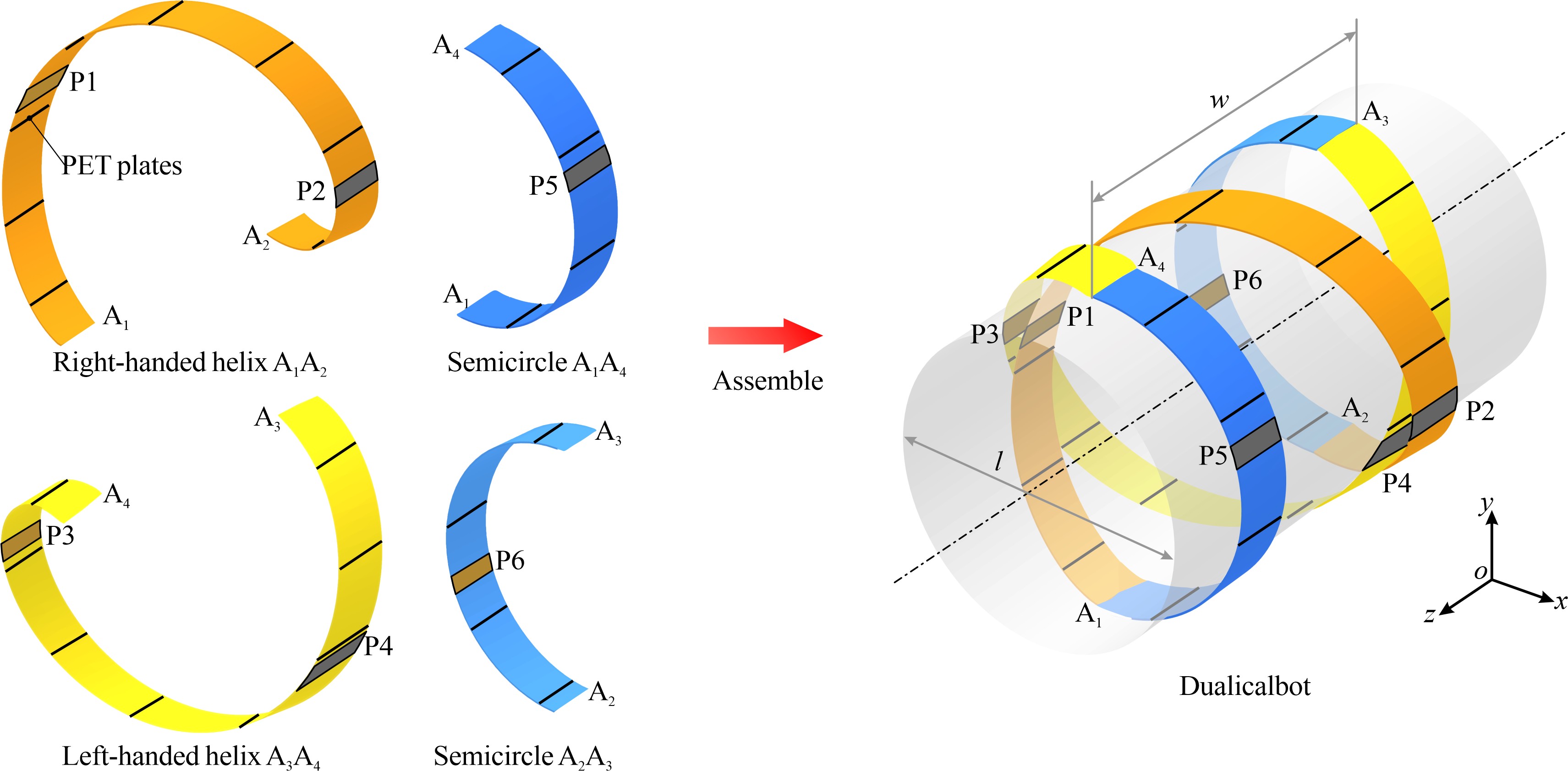
To further enhance the speed of soft robots driven by constant environmental conditions, we propose a dual-helix robot, Dualicalbot. By alternately driving two sets of opposite chirality helical structures, this robot eliminates the need for a separate configuration recovery stage after deformation, significantly improving its speed. The robot can roll at a speed of 5.8 times its body length per second in a constant humidity environment, surpassing the highest speed of existing soft robots driven by constant environmental conditions by a factor of 4.8. It can also carry a load equal to its own weight and is applicable for environmental pH detection.
Double-helical robot 'Dualicalbot'
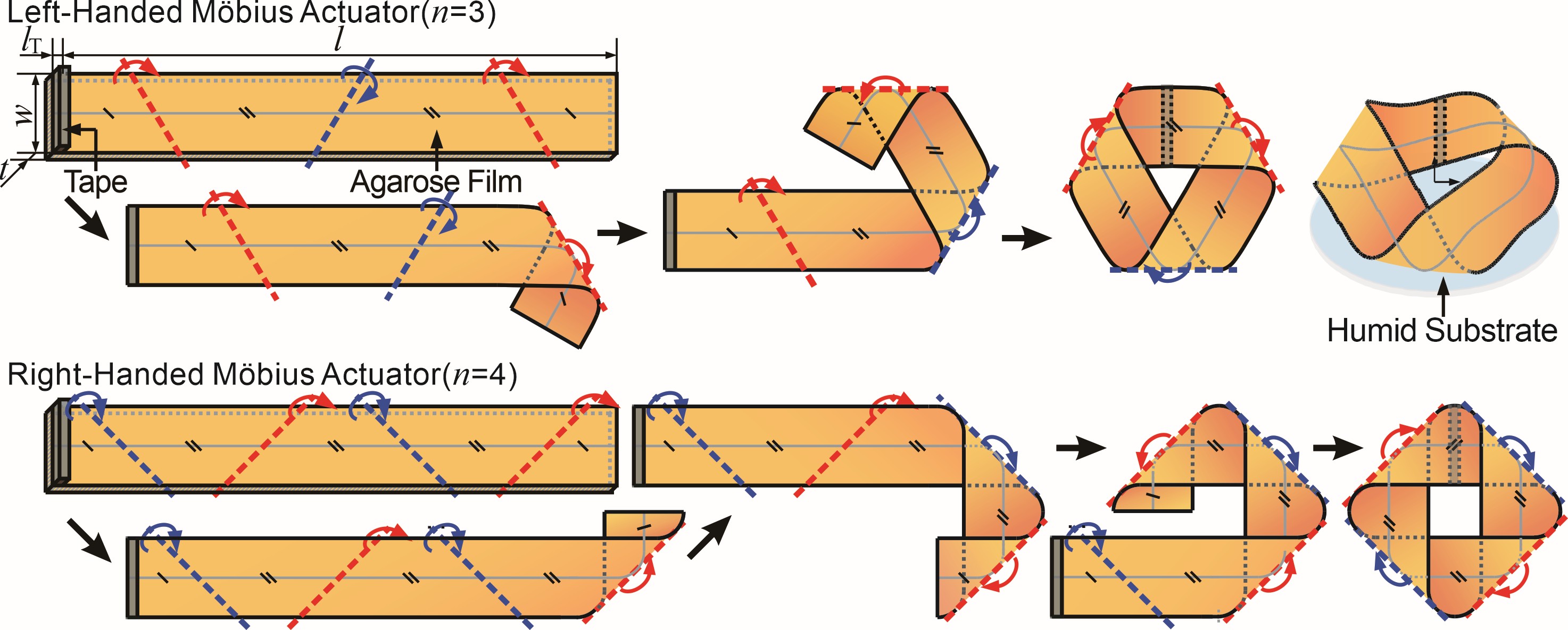
Additionally, we have developed a class of triply symmetric Möbius robots, which can operate continuously in a constant environment. By combining deployable surfaces with diffusion theory in a physical model, we have revealed the mechanisms behind their shape retention and continuous movement under humidity gradients. Experiments have shown that these robots can achieve over 252 hours of autonomous periodic movement while continuously outputting mechanical work, and they can dynamically sense environmental humidity.
Threefold Möbius machine
The structural design and theoretical modelling methods proposed in these studies offer new interdisciplinary research approaches for the structural design of environmental-driven soft robots. They present promising prospects for advanced robotics applications, with potential to drive the application of humidity-driven soft robots in fields such as healthcare, sensing, and actuation.
Lei Fu#, Weiqiang Zhao#, Jiayao Ma#, Mingyuan Yang, Xinmeng Liu, Lei Zhang*, Yan Chen*. A Humidity-Powered Soft Robot with Fast Rolling Locomotion. Research, 2022, 2022, 9832901.
(https://doi.org/10.34133/2022/9832901)
Chuhan Xu#, Jiayao Ma#, Lei Fu, Xinmeng Liu, Lei Zhang*, Yan Chen*. An Ultra-Fast Rolling Double-Helical Robot Driven by Constant Humidity. Advanced Science, 2025, 12(23), 2500577.
(https://doi.org/10.1002/advs.202500577)
Xiaochen Yang#, Weiqiang Zhao#, Jiayao Ma#, Zhiming Hu, Xinmeng Liu, Lei Fu, Chuhan Xu, Jiuan Lv, Lei Zhang*, Yan Chen*. Threefold Möbius Machine. Advanced Functional Materials, 2025, 35(23), 202420815.
(https://doi.org/10.1002/adfm.202420815)
2 Deployable robots
Deployable structures have the inherent capability of changing their size and morphology significantly with minimal mobility. The threefold-symmetric Bricard linkage is a 6R over-constrained linkage with good folding characteristics. Combining a threefold-symmetric Bricard linkage with robotics, a novel deployable robot is developed. It can adjust its morphology to adapt to multiple tasks or an uncertain environment.
Through the observation of the movements of hexapod insects such as mantis and ants, we found that they have a movable and multi-segmented body. When encountering an obstacle, they will lift the front segment of the body to increase their ability to climb obstacles. Inspired by this motion pattern, we designed a hexapod crawling robot named “HIbot” with two movable body segments. When HIbot encounters an obstacle during locomotion, it will lift the front segment passively due to friction between the legged wheels and the obstacle. This robot can crawl in various outdoor environments such as gravel, grassland, etc. With the help of the legged wheels and the movable body segments, it can cross obstacles that are as high as 2.8 times the radius of the legged wheel. Such characteristics give the robot great potential in real-world applications.
Bio-inspired hexapod robot
These two types of robots are suitable for security and disaster investigation missions due to their morphing capability and high climbing ability. Future work will further take inspiration from deployable structures and the body-environment interaction behaviors of animals, and investigate cooperation strategies between mechanical and computational intelligence in a robotic system.
4 Aquatic-terrestrial amphibious robots
From the leaps of a frog into water to the agile movements of mudskippers across tidal flats, many small animals can effortlessly navigate both land and water. Their locomotion strategies, though seemingly simple, achieve remarkable efficiency. A key challenge in amphibious robotics is developing a minimalist system that can traverse these two radically different environments using the fewest possible actuators. By integrating rigidly foldable origami structures with SMA actuation, the study demonstrates large-scale motion amplification from minimal actuation, enabling seamless transitions between terrestrial crawling and underwater jet propulsion. This design opens new avenues for lightweight, multimodal, low-power amphibious robots and their potential applications in environmental monitoring, search and rescue, and reconnaissance.
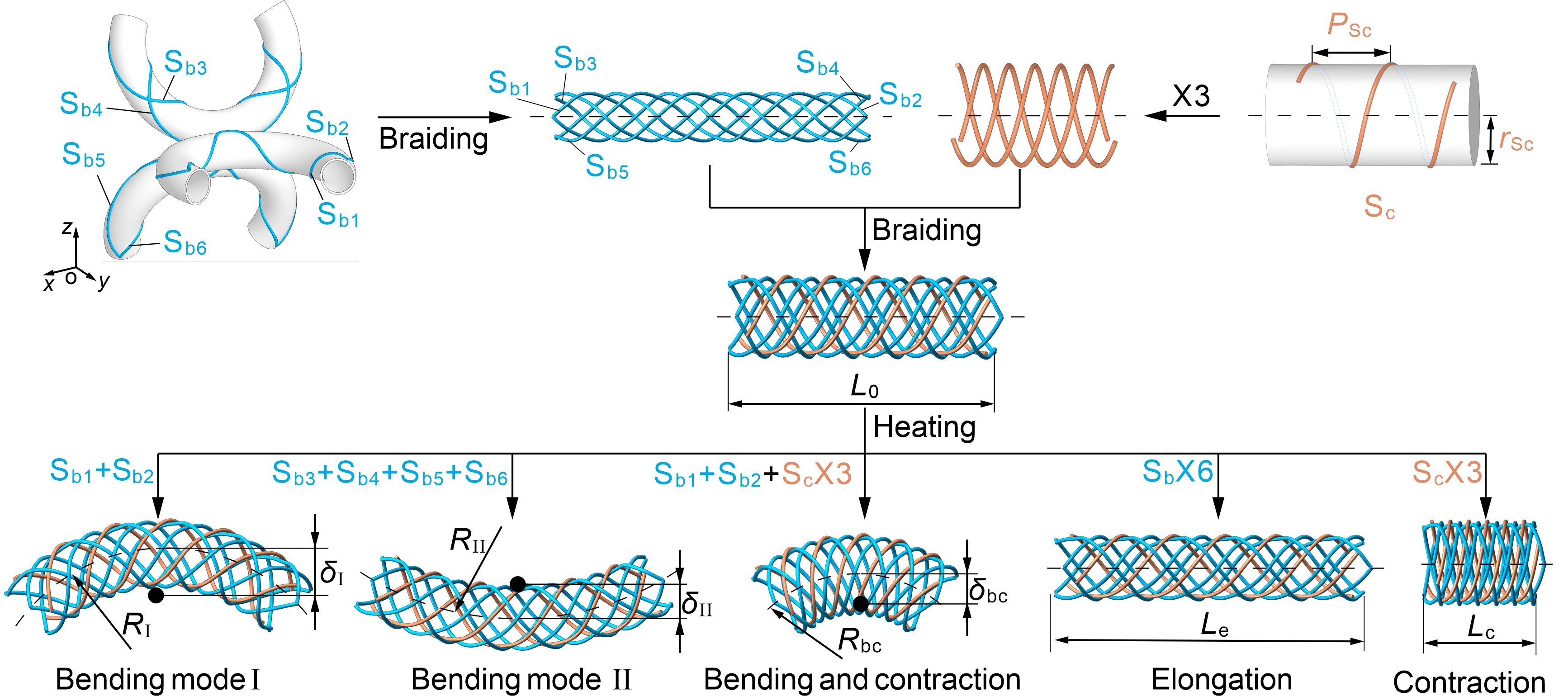
5 A multimode soft robot based on a single braided tube
Soft robots with multimode locomotion possess great application potential across various engineering fields due to their exceptional motion flexibility and environmental adaptability. How to achieve diverse deformations and motions with a simple structure formed by smart materials has remained a core challenge. To address this challenge, we propose a multimode soft robot based on a single braided tube composed of shape memory alloy (SMA) wires set at distinct initial configurations. By strategically heating different wires, it can realize axial contraction, elongation, and bending deformation. Leveraging the abundant deformation modes, it can move by straight crawling, left/right turning, inchworm crawling, and rolling, without additional actuators. The proposed structure-actuation integrated design approach provides a new way of developing highly integrated, multifunctional soft robots with enhanced adaptability and performance.
A multimode soft robot based on a single braided tube
Zhenhao Jia#, Jiayao Ma*, Yan Chen*, A Multimode Soft Robot Based on a Single Braided Tube. Advanced Intelligent Systems, 2025, e202500777.
(http://doi.org/10.1002/aisy.202500777)