Metamaterials are man-made materials or structures whose internal constituents and topologies allow them to have unusual emergent properties which are not available among conventional materials. Origami, kirigami, and modular origami techniques, which transform 2D materials into complex 3D structures, are able to provide a geometric design approach independent of scale and material, and hence offer a promising platform for the design of metamaterials. Thus, our laboratory focuses on the structural design and property analysis of metamaterials based on origami, kirigami, and modular origami techniques.
1 Origami-based metamaterials
1.1 Waterbomb origami metamaterials
For the tubular waterbomb origami structures, the kinematic compatibility conditions and the closed-loop constraints of the tubular mesh are considered, and the equations of motion are established accordingly. A mathematical relationship between the geometric design parameters and the folding kinematics is derived. It is shown by the kinematic model that, when the number of layers is small, the folding process is governed by a single mechanism motion. As the number of layers increases, physical interference leads to a hybrid folding mode, in which transitions among mechanism motion-structural deformation-mechanism motion are induced. By analytically establishing the relationship between geometric parameters and folding deformation, the programmable design of folding modes and surface configurations is enabled, allowing for precise control over the transition between rigidity and flexibility. Further analysis reveals that the torsion of the middle layer in the fully contracted state is governed by mechanism motion, while the subsequent torsion is attributed to structural deformation. Based on this torsional characteristic, a class of metamaterials with compressive-torsional coupled deformation is designed, through which large torsional deformation and graded stiffness induced by folding mode transitions are achieved.
Mechanism-structure-mechanism transitions, compressive-torsional coupling, and graded stiffness in tubular waterbomb origami metamaterials
Jiayao Ma, Huijuan Feng, Yan Chen*, Degao Hou, Zhong You*. Folding of Tubular Waterbomb. Research, 2020, 2020: 1735081. (https://doi.org/10.34133/2020/1735081)
Tanmoy Mukhopadhyay, Jiayao Ma, Huijuan Feng, Degao Hou, Joseph M. Gattas, Yan Chen*, Zhong You*. Programmable stiffness and shape modulation in origami materials: Emergence of a distant actuation feature. Applied Materials Today, 2020, 19: 100537. (https://doi.org/10.1016/j.apmt.2019.100537)
Huijuan Feng, Jiayao Ma, Yan Chen*, Zhong You. Twist of tubular mechanical metamaterials based on waterbomb origami. Scientific Reports, 2018, 8(1): 9522. (https://doi.org/10.1038/s41598-018-27877-1)
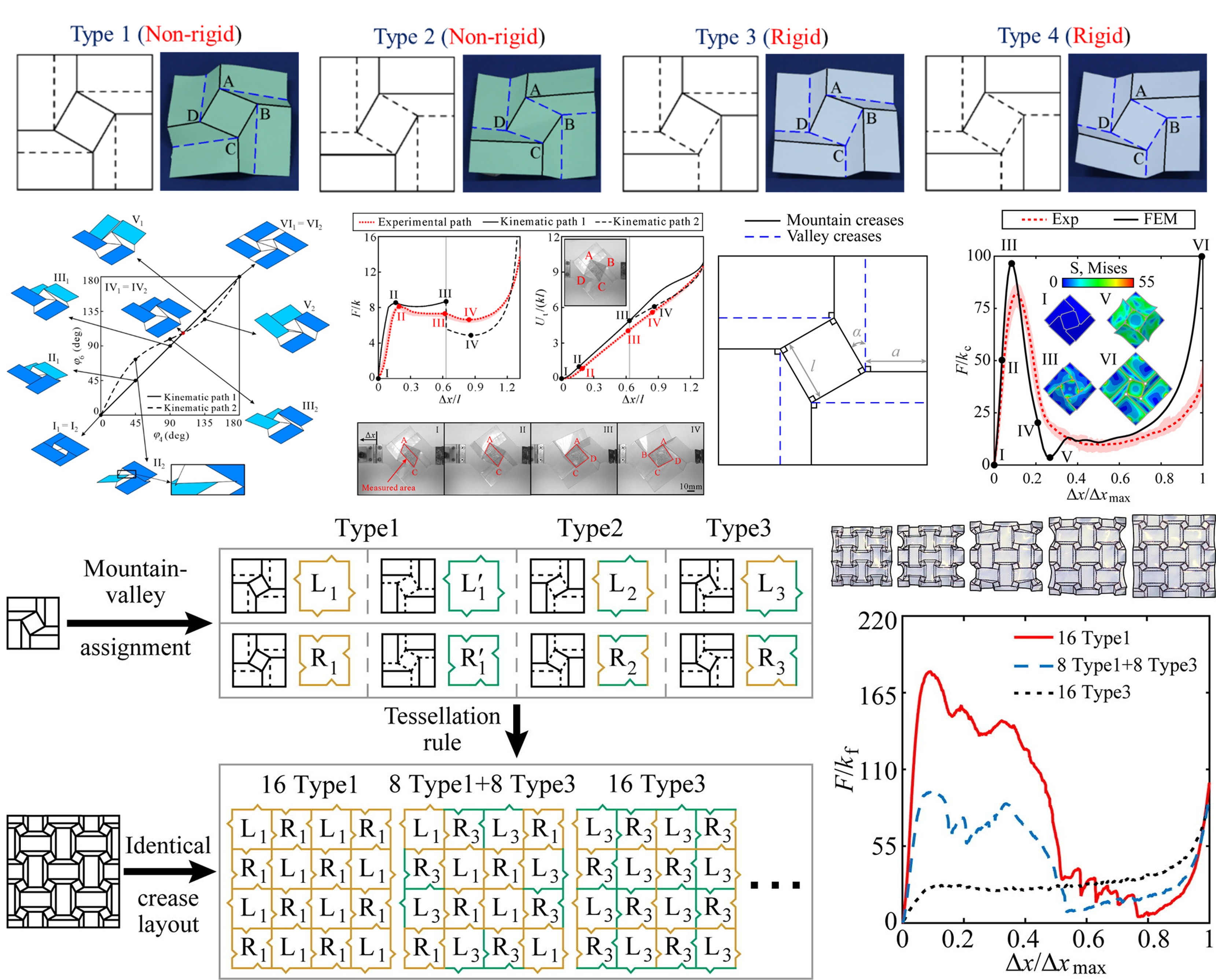
The square-twist origami structure was investigated using spatial kinematics theory and mechanism-based mesh analysis. The rigid-foldability under four different mountain–valley crease assignments was studied, and explicit kinematic equations were derived accordingly. For the non-rigid Type 2 unit, an equivalent origami model was constructed by replacing bending deformation of the square panels with virtual crease rotations, based on insights from uniaxial tensile experiments. Theoretical analysis revealed that the non-rigid Type 2 and rigid Type 2M units undergo bifurcation during stretching and follow the path of minimum energy deformation. Furthermore, a mechanical model was established for the non-rigid Type 1 unit, and a design strategy for tunable mechanical performance was proposed by programming geometric and material parameters. Based on the analysis of individual units, square-twist origami metamaterials composed of different types and proportions of units were designed. It was demonstrated that the mechanical properties of the metamaterials can be precisely programmed through unit-level superposition, while individual units retain independent deformation modes within the tessellated structure.
Kinematic analysis, mechanical modeling, and property programming of square-twist origami metamaterials
Huijuan Feng, Rui Peng, Shixi Zang, Jiayao Ma, Yan Chen*. Rigid foldability and mountain-valley crease assignments of square-twist origami pattern. Mechanism and Machine Theory, 2020, 152: 103947. (https://doi.org/10.1016/j.mechmachtheory.2020.103947)
Jiayao Ma#, Shixi Zang#, Huijuan Feng, Yan Chen*, Zhong You. Theoretical characterization of a non-rigid-foldable square-twist origami for property programmability. International Journal of Mechanical Sciences, 2021, 189: 105981. (https://doi.org/10.1016/j.ijmecsci.2020.105981)
Shixi Zang#, Jiayao Ma#, Zhong You, Yan Chen*. Deformation characteristics and mechanical properties tuning of a non-rigid square-twist origami structure with rotational symmetry. Thin-Walled Structures, 2022, 179: 109570. (https://doi.org/10.1016/j.tws.2022.109570)
Jiayao Ma#, Shixi Zang#, Yan Chen*, Zhong You*. The tessellation rule and properties programming of origami metasheets built with a mixture of rigid and non-rigid square-twist patterns. Engineering, 2022, 17: 82–92. (https://doi.org/10.1016/j.eng.2022.02.015)
1.3 Thin-walled structures for energy absorption
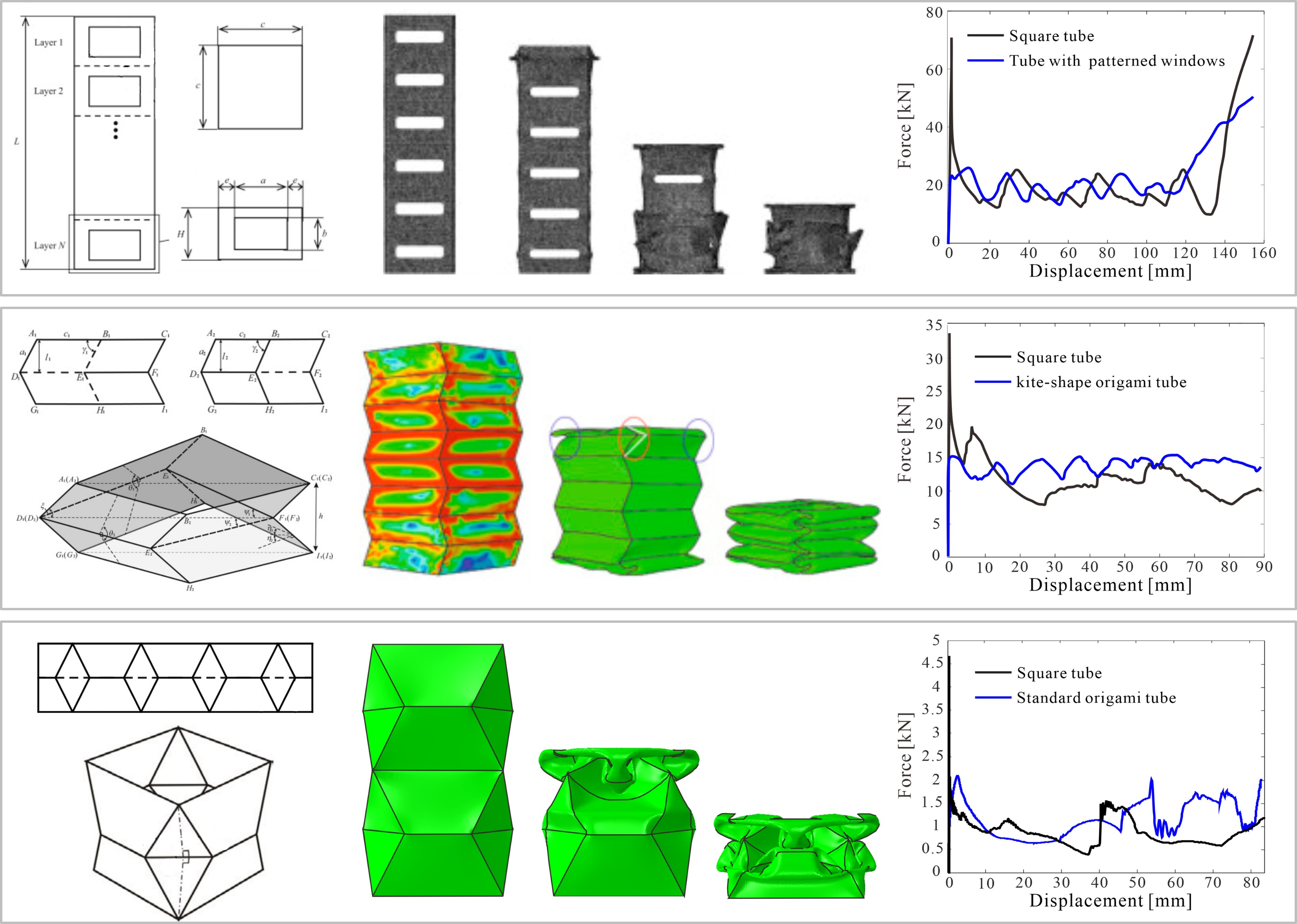
To reduce the initial peak force while maintaining high energy absorption efficiency in tubular energy-absorbing devices, a pattern design strategy was adopted to develop novel thin-walled tubular structures. Square tubes with patterned windows were designed, and their axial crushing performance was optimized through topological design. Compared to conventional square tubes, these windowed designs reduced the initial peak force by 63% while increasing specific energy absorption by 54%. To further improve energy absorption performance, a pre-folding approach based on origami designs was implemented. The application of a kite-shaped rigid origami pattern produced a smoother, more efficient energy absorption response, achieving a 56.5% reduction in initial peak force and a 29.2% enhancement in specific energy absorption. Additionally, a series of origami-inspired crash boxes with more efficient deformation modes were proposed. The optimized structures demonstrated up to a 68.3% reduction in initial peak force and a 107.1% increase in specific energy absorption compared to traditional square tubes.
Tubes with patterned windows, tubes with a kite-shape rigid origami pattern, and origami crash boxes
Jie Song, Yan Chen*, Guoxing Lu. Axial crushing of thin-walled structures with origami patterns. Thin-Walled Structures, 2012, 54: 65–71. (https://doi.org/10.1016/j.tws.2012.02.007)
Jie Song, Yan Chen*, Guoxing Lu. Light-Weight Thin-Walled Structures with Patterned Windows under Axial Crushing. International Journal of Mechanical Sciences, 2013, 66: 239–248. (https://doi.org/10.1016/j.ijmecsci.2012.11.014)
Jiayao Ma, Degao Hou, Yan Chen*, Zhong You. Quasi-static axial crushing of thin-walled tubes with a kite-shape rigid origami pattern: numerical simulation. Thin-Walled Structures, 2016, 100: 38–47. (https://doi.org/10.1016/j.tws.2015.11.023)
Lin Yuan, Haoyuan Shi, Jiayao Ma*, Zhong You. Quasi-Static Impact of Origami Crash Boxes with Various Profiles. Thin-Walled Structures, 2019, 141: 435–446. (https://doi.org/10.1016/j.tws.2019.04.028)
1.4 Graded origami metamaterials
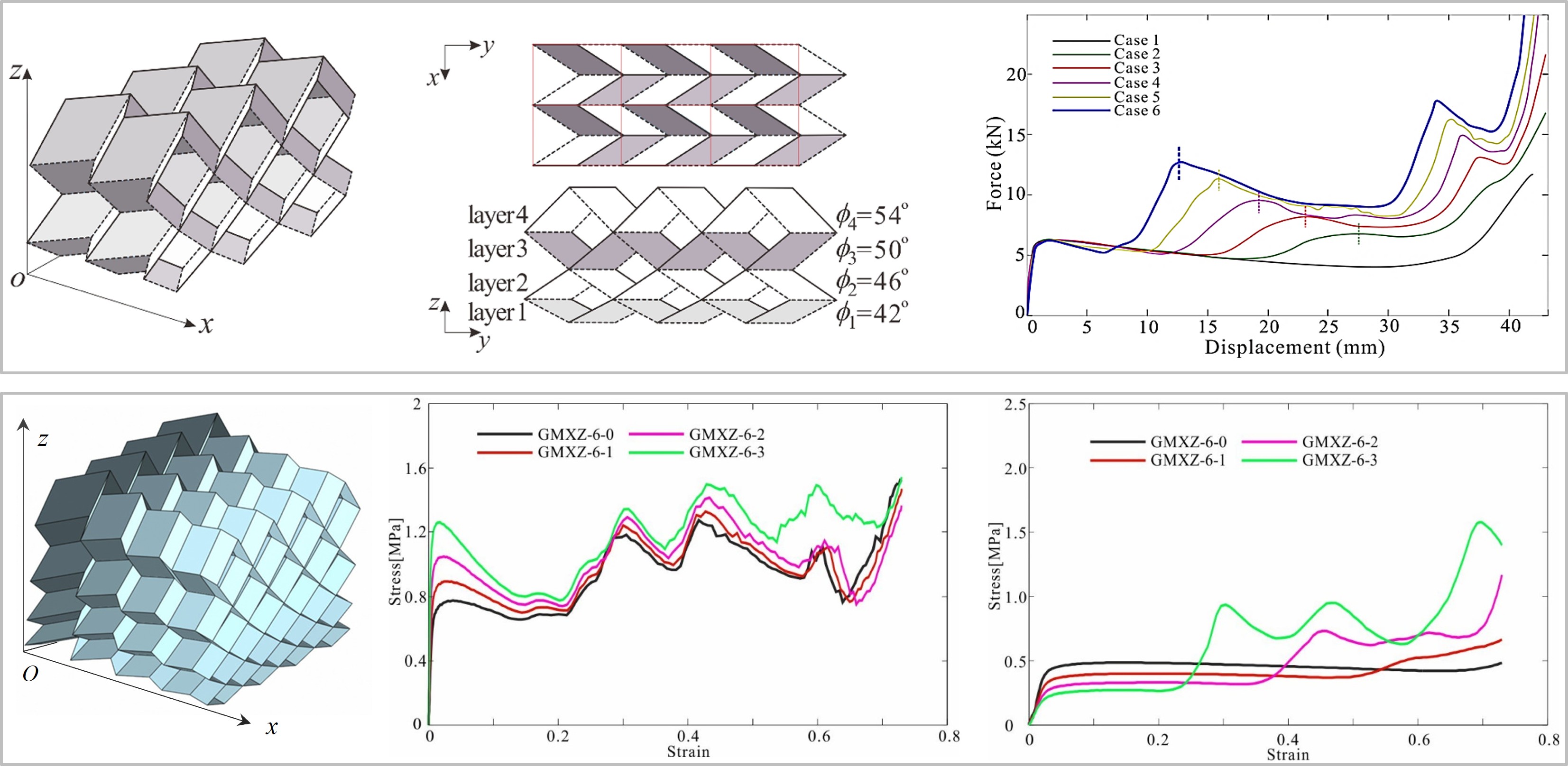
Inspired by functionally graded materials in nature, a design methodology for gradient origami metamaterials based on the Miura-ori pattern was proposed. A kinematic model of out-of-plane graded Miura-ori metamaterials was established, revealing their self-locking behavior and deformation mechanisms. Experimental results demonstrated an energy absorption enhancement of 106.10% compared to uniform structures. Furthermore, in-plane graded and three-dimensional graded origami metamaterials were developed. Based on a spatial multi-loop mechanism kinematic model, the geometric parameters of crease patterns and motion compatibility conditions under three-dimensional grading were derived. An analytical model describing the rigid folding to non-rigid folding transition of the metamaterials was constructed. Parametric analysis indicated an approximately linear relationship between the folding angle gradient and energy absorption, with the maximum gradient structure achieving nearly three times the energy absorption of uniform counterparts. The three-dimensional graded structures exhibited energy absorption improvements of 42.67% and 129.68% under in-plane and out-of-plane loading conditions, respectively.
Gradient origami metamaterials with two-dimensional and three-dimensional graded stiffness
Jiayao Ma, Jichao Song, Yan Chen*. An Origami-inspired Structure with Graded Stiffness. International Journal of Mechanical Sciences, 2018, 136: 134–142. (https://doi.org/10.1016/j.ijmecsci.2017.12.026)
Lin Yuan, Huaping Dai, Jichao Song, Jiayao Ma*, Yan Chen. The behavior of a functionally graded origami structure subjected to quasi-static compression. Materials & Design, 2020, 189: 108494. (https://doi.org/10.1016/j.matdes.2020.108494)
1.5 Reconfigurable origami metamaterials
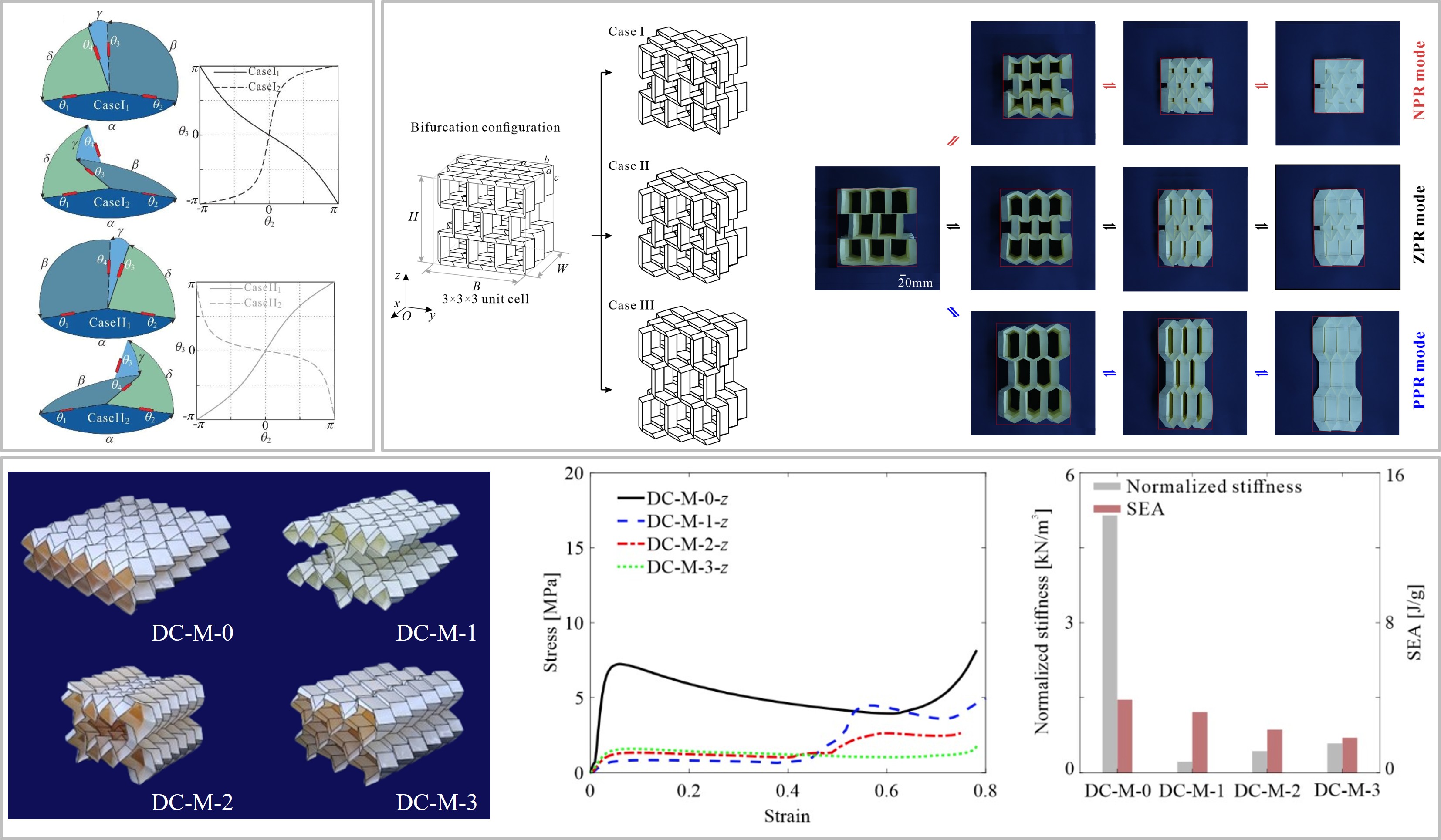
Most research on programming the properties of origami metamaterials has focused on geometric or material parameters such as design angles, panel edge lengths, and folding angles, while the role of mountain-valley crease arrangements in crease patterns has been largely overlooked. The research team systematically analyzed the influence of different mountain-valley crease configurations on the Poisson’s ratio of stacked Miura-ori origami metamaterials. The results demonstrated that when the origami patterns satisfied specific mountain-valley distribution schemes, in-plane negative, zero, and positive Poisson’s ratios were exhibited, respectively. The effects of different mountain-valley crease assignments on the geometry and mechanical properties of double-corrugated origami metamaterials were also systematically investigated. By exploiting the geometric scale correlation of configurations sharing the same crease path directions, hybrid arrangements were constructed to produce metamaterials with more complex geometric features. The specific energy absorption within the hybrid structures was primarily influenced by the total angular variation during compression, and was determined by the number and types of origami units involved in the hybrid arrangement. Through rational combinations of different units, programmable design of the metamaterial’s specific energy absorption was achieved, providing targeted solutions to meet diverse application requirements.
Programming the mechanical properties of stacked Miura origami and double-corrugated origami metamaterials by varying mountain-valley assignments
Rui Peng, Jiayao Ma, Yan Chen*. The Effect of Mountain-Valley Folds on the Rigid Foldability of Double Corrugated Pattern. Mechanism and Machine Theory, 2018, 128: 461–474. (https://doi.org/10.1016/j.mechmachtheory.2018.06.012)
Weiqi Liu, Song Cao, Yan Chen*. Mountain-valley crease reconfiguration of 4-crease origami vertices and tessellations. International Journal of Mechanical Sciences, 2024, 273: 109224. (https://doi.org/10.1016/j.ijmecsci.2024.109224)
Mengyue Li, Rui Peng, Jiayao Ma*, Yan Chen*. Programming the mechanical properties of double-corrugated metamaterials by varying mountain-valley assignments. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2024, 382: 20240004. (https://doi.org/10.1098/rsta.2024.0004)
2 Kirigami metamaterials
2.1 Planar kirigami metamaterials
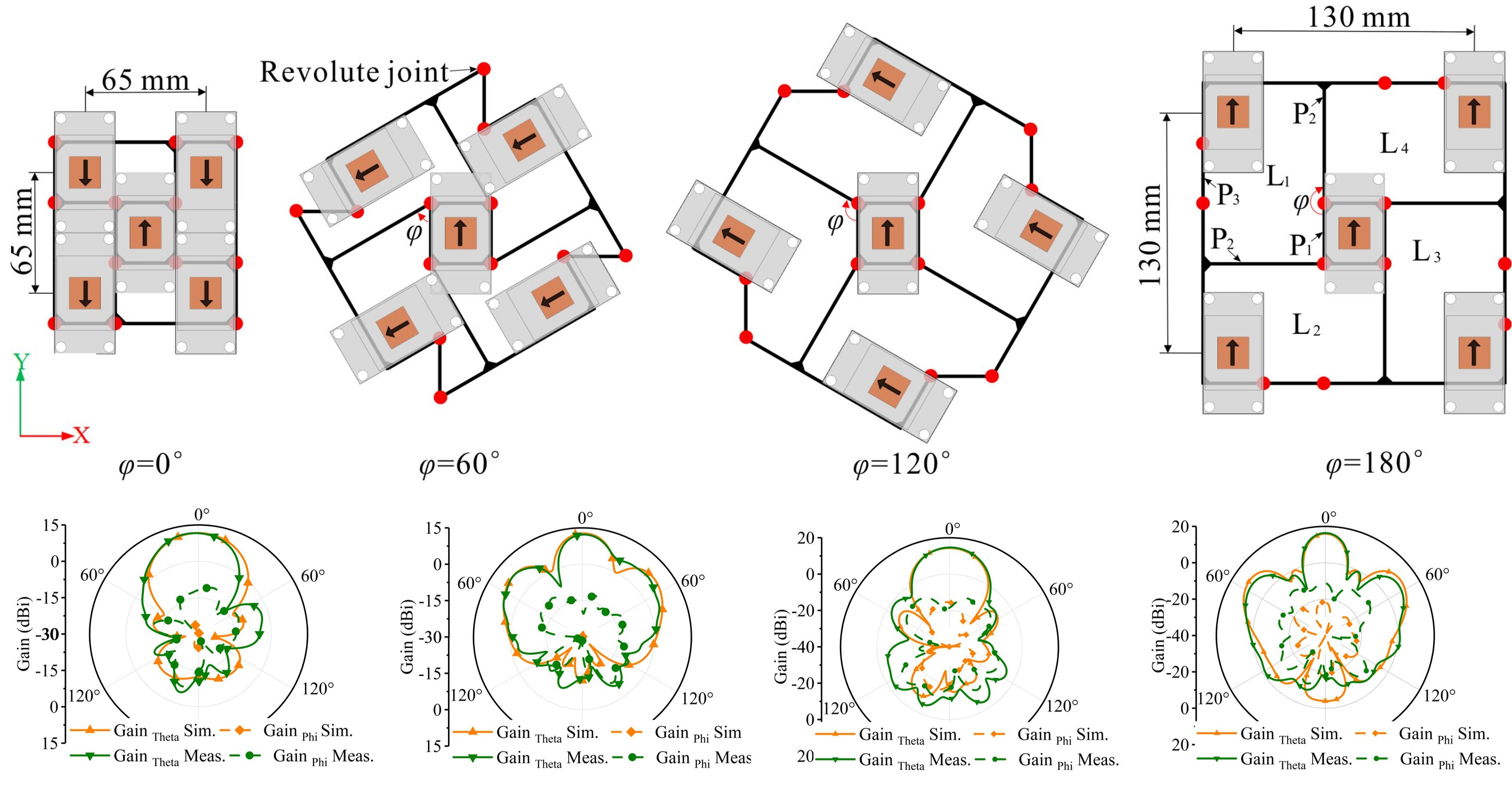
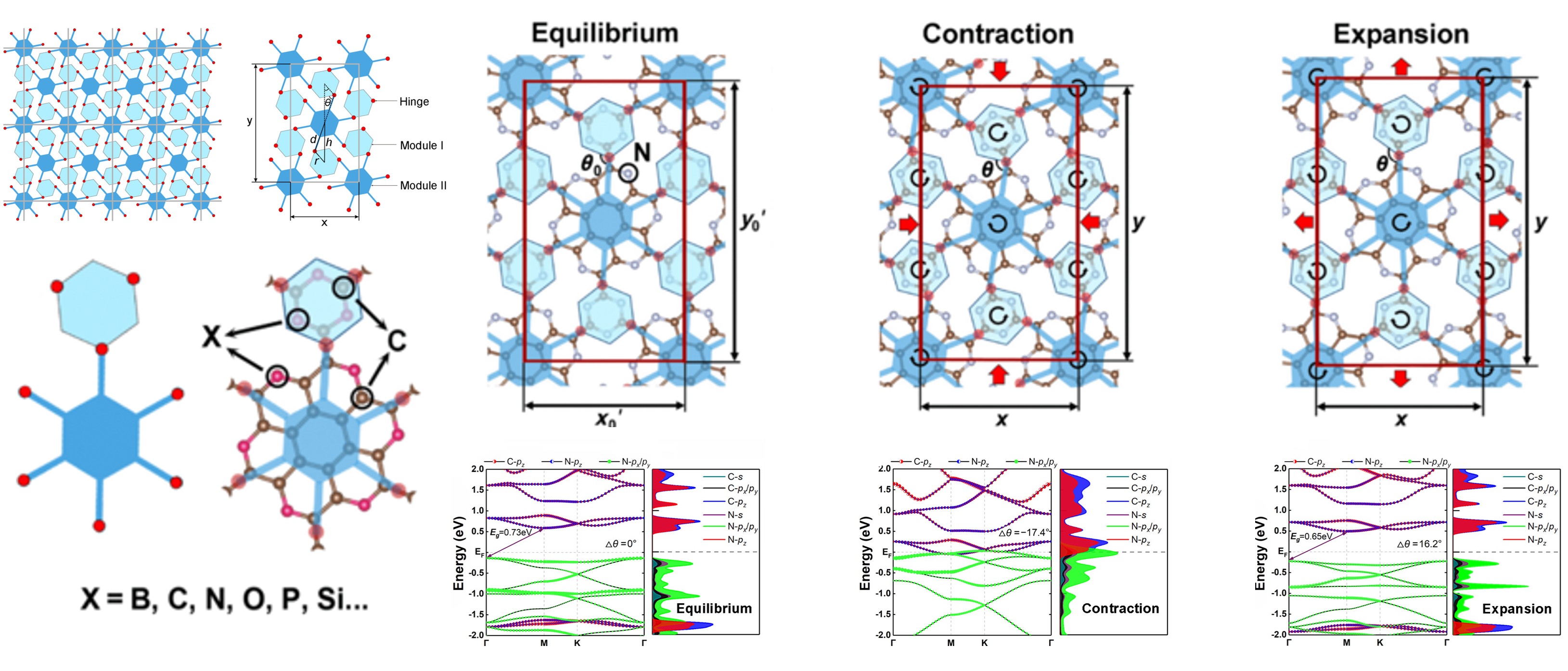
A single-degree-of-freedom mechanically reconfigurable framework system was designed based on planar kirigami structures, enabling synchronous reconfiguration of antenna array size and inter-element phase distribution. Consequently, a gain-enhanced reconfigurable radiation array (RRA) was developed by integrating miniaturized directive elements with the mechanically reconfigurable system. Furthermore, a novel two-dimensional honeycomb kirigami mechanism was mapped onto graphene, leading to the design of a nitrogen-doped porous graphene (NPG) metamaterial. Through first-principles calculations and molecular dynamics simulations, the unique topology was shown to endow the material with rotational deformation behavior, enabling a metal–insulator transition under small deformations. This transition altered the dominant heat-carrying units within the material, achieving an ultrahigh thermal switching ratio of 27.78 at 1% strain.
Abubakar M. Sadiq#, Yuanqing Gu#, Yu Luo, Yan Chen*, Kaixue Ma*. A gain-enhanced reconfigurable radiation array with mechanically driven system and directive elements. Frontiers of Mechanical Engineering, 2022, 17(4): 60. (https://doi.org/10.1007/s11465-022-0716-0)
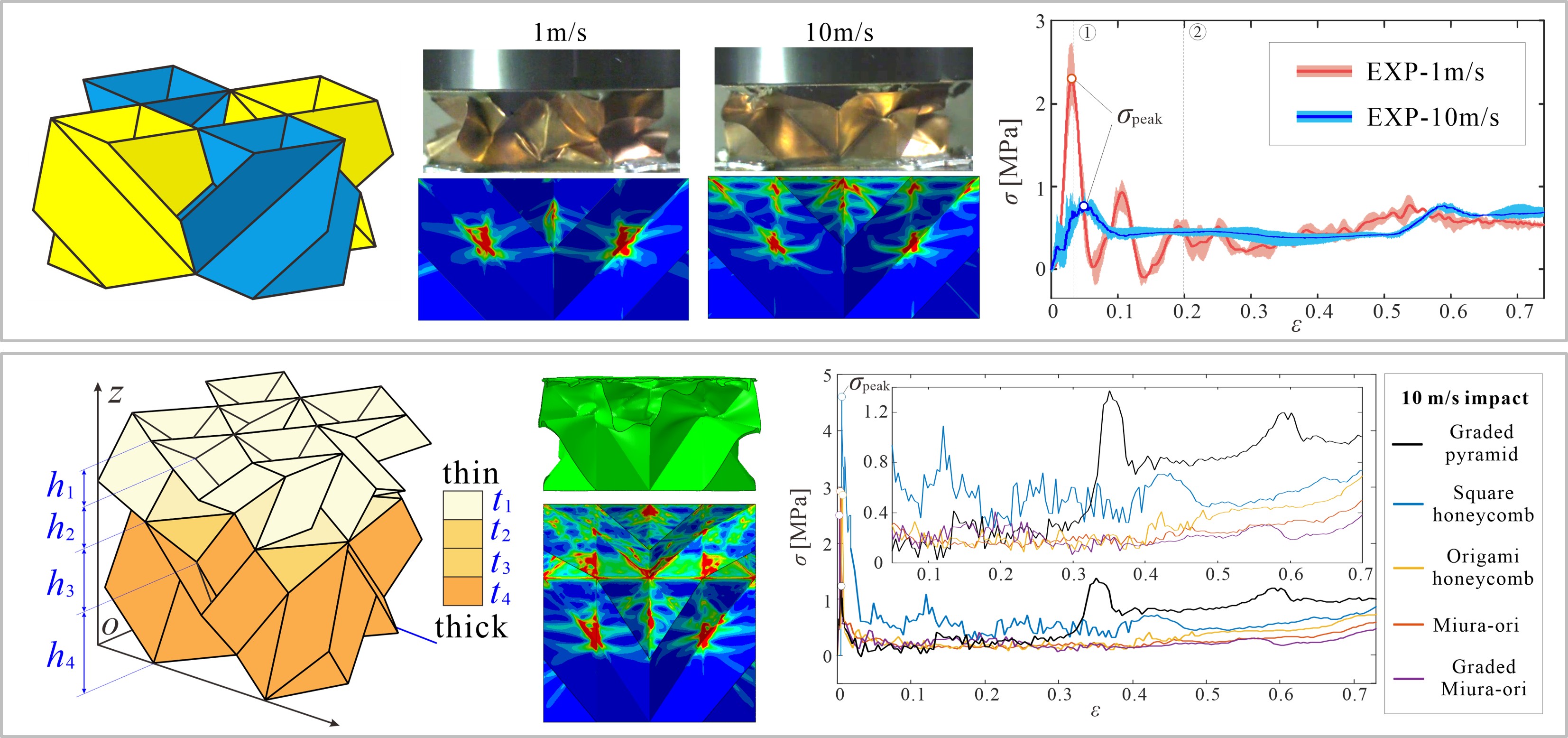
A hierarchical chiral helical structure inspired by kirigami was designed, enabling chirality switching and transfer through bifurcation of the mechanism motion. A novel pyramid foldcore structure was developed by alternately arranging left-handed and right-handed chiral units. The deformation mechanisms and mechanical properties of the sandwich structure were systematically investigated through quasi-static compression and shear loading experiments, complemented by numerical simulations and theoretical analyses. Compared to square honeycomb, Miura-ori, and eggbox structures, the pyramid foldcore exhibited energy absorption improvements of 73%, 342%, and 130%, respectively. Furthermore, the energy absorption characteristics under low-velocity impact were explored, revealing unique deformation mechanisms enhanced by inertia effects. By introducing geometric gradient, graded pyramid foldcores with multiple layers were constructed. These graded structures achieved significant performance enhancements, reducing load uniformity by 70.9% and 80.5% compared to conventional honeycomb and Miura-ori foldcores, respectively, while simultaneously increasing specific energy absorption by 0.97% and 138.37%.
Energy absorption of kirigami-inspired pyramid foldcore sandwich structures under quasi-static compression and low-velocity impact
Huijuan Feng#, Weilin Lv#, Jiayao Ma, Wenwu Chang, Yan Chen*, Jianshan Wang. Helical structures with switchable and hierarchical chirality. Applied Physics Letters, 2020, 116(19): 194102. (https://doi.org/10.1063/5.0005336)
Jiayao Ma, Huaping Dai, Sibo Chai, Yan Chen*. Energy absorption of sandwich structures with a kirigami-inspired pyramid foldcore under quasi-static compression and shear. Materials & Design, 2021, 206: 109808. (https://doi.org/10.1016/j.matdes.2021.109808)
Houhua Chen#, Sibo Chai#, Jiayao Ma*. Energy absorption of the kirigami-inspired pyramid foldcore sandwich structures under low-velocity impact. International Journal of Mechanical Sciences, 2024, 284: 109774. (https://doi.org/10.1016/j.ijmecsci.2024.109774)
2.3 Thermal expansion metamaterials
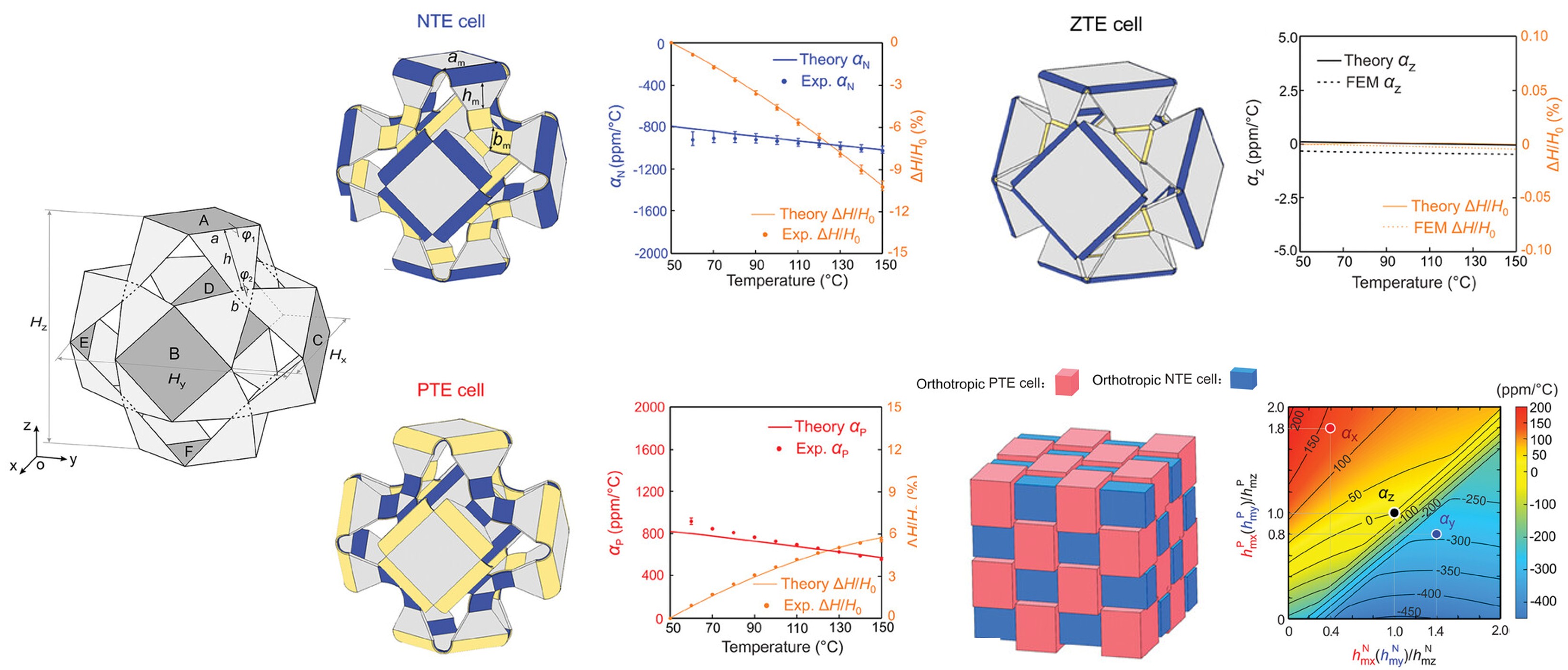
Researchers started with the truncated octahedral kirigami unit cell and analyzed its single-degree-of-freedom kinematic characteristics. Building on this, by breaking the symmetry of the kirigami polyhedra, they obtained the design of an orthotropic single-degree-of-freedom origami unit cell. By replacing the folding creases of the cells with curved bi-material strips comprising of two layers with high and low coefficient of thermal expansion respectively, the polyhedral cells with isotropy and orthotropy for thermal expansion metamaterials are obtained (ranging from -2354.3 to 3006.7 ppm/°C). Then, zero thermal expansion can be realized by cancelling out the normal thermal expansion of the substrate panels through folding of the bi-metal creases. By combining orthotropic cells with a hybrid method, a programmable orthotropic metamaterial was designed to exhibit negative/zero/positive thermal expansion in three orthogonal directions.
Kirigami-inspired three-dimensional metamaterials with programmable isotropic and orthotropic thermal expansion
Yuanqing Gu#, Zhibo Wei#, Guowu Wei, Zhong You, Jiayao Ma*, Yan Chen*. Kirigami-inspired three-dimensional metamaterials with programmable isotropic and orthotropic thermal expansion. Advanced Materials, 2024, 2411232. (https://doi.org/10.1002/adma.202411232)
3 Modular Origami Metamaterials
3.1 Metamaterials with programmable Poisson’s ratio
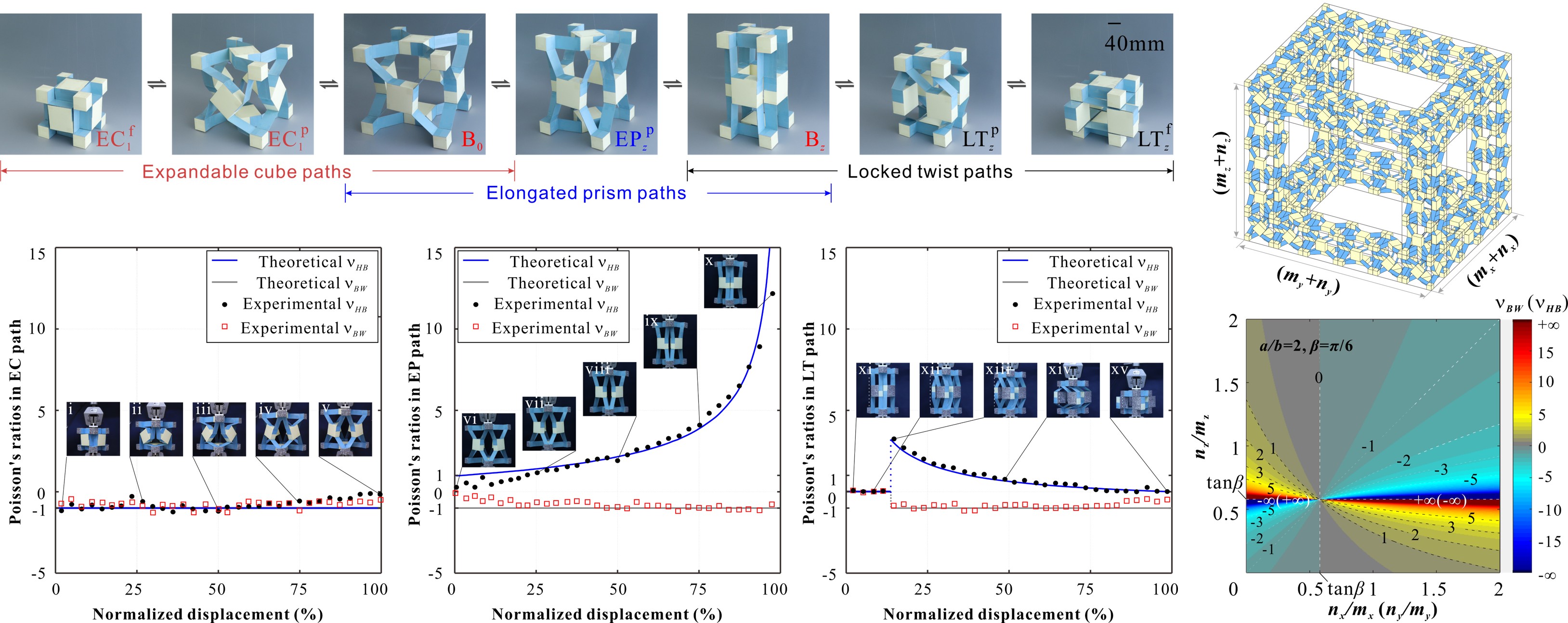
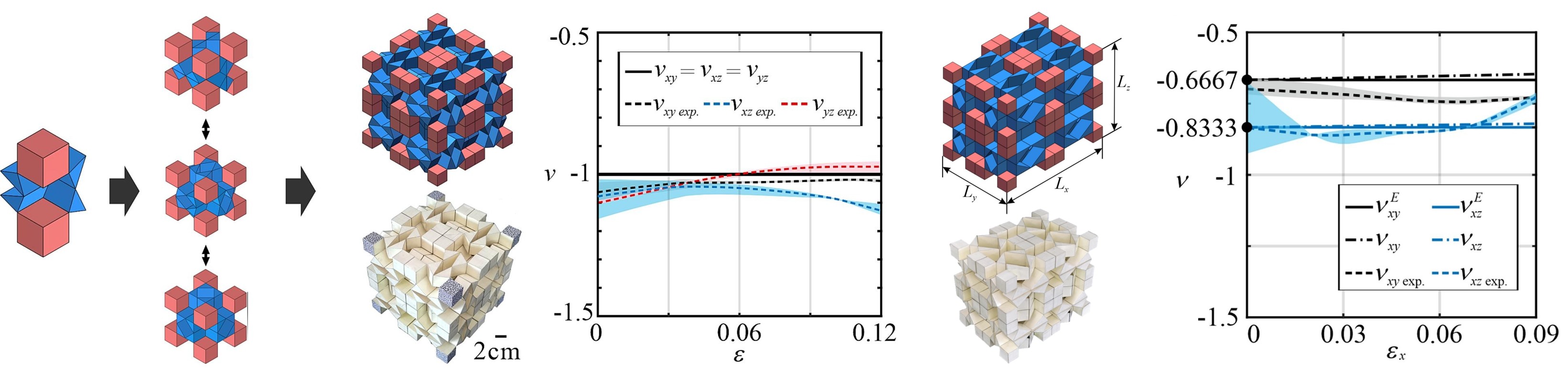
Based on the Wohlhart polyhedron, a single-degree-of-freedom reconfigurable module with multiple reliable deformation paths was developed. Through intrinsic kinematic bifurcation, the module was continuously reconfigured among an expandable cube, an elongated prism, and a locked twisting path, exhibiting negative, positive, and zero Poisson’s ratio behaviors, respectively, along with local and global chirality and tunable stiffness. By combining different deformation paths based on geometric compatibility and motion coordination, a three-dimensional metamaterial was constructed. The Poisson’s ratios in orthogonal planes of the metamaterial were programmably tuned across the full range from −∞ to +∞ by adjusting the proportions in different directions.
Modular origami metamaterials with programmable negative Poisson’s ratio
Modular origami metamaterials with programmable constant Poisson’s ratio
Weiqi Liu, Hanqing Jiang, Yan Chen*. 3D programmable metamaterials based on reconfigurable mechanism modules. Advanced Functional Materials, 2022, 32(9): 2109865. (https://doi.org/10.1002/adfm.202109865)
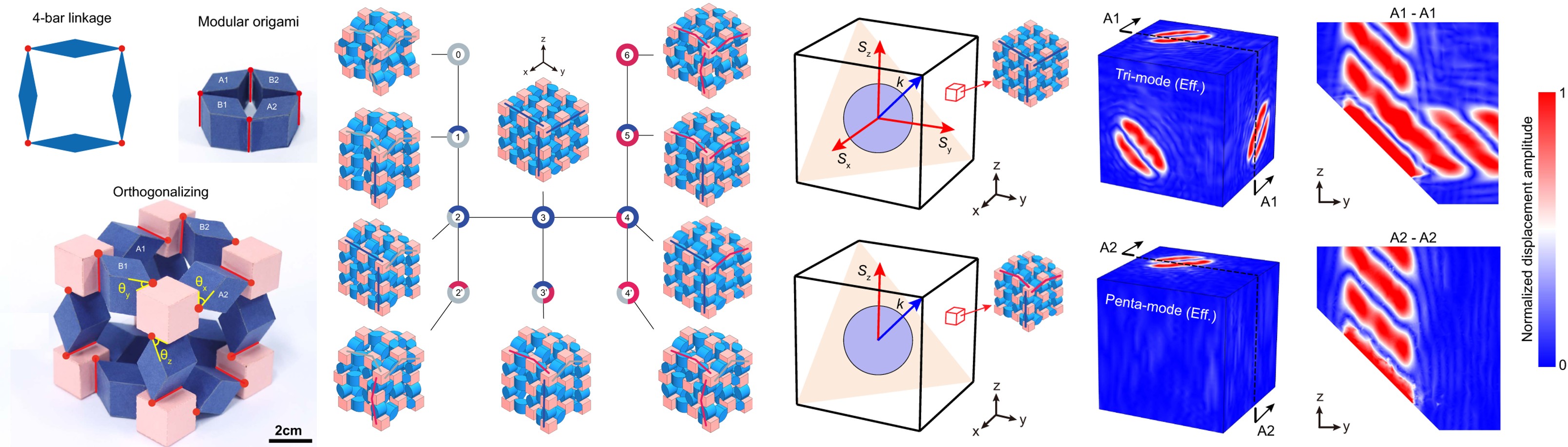
A transformable metamaterial with programmable zero modes was proposed by designing a three-dimensional modular origami structure with decoupled kinematic degrees of freedom, enabling independent programming of zero modes along orthogonal directions. This design achieves full coverage of zero modes ranging from 0 to 6 for the first time, and supports reversible transformation among various configurations. The zero modes characteristics across different configurations are verified through static experiments. Furthermore, the tunable wave manipulations are investigated and demonstrated in 1D, 2D, and 3D systems. On the other hand, conventional three-dimensional penta-mode metamaterials are limited to the diamond lattice structures, lacking alternative lattice topologies and reconfigurable features. To address this, a transformable anisotropic 3D penta-mode metamaterial was developed, which can transform between regular truncated octahedron and transformed truncated octahedron configurations, exhibiting isotropic and anisotropic penta-mode properties, respectively. This transition enables tunable effective acoustic impedance and wave velocity, allowing precise control of underwater acoustic transmission amplitude and phase.
Wave metamaterials with programmable zero modes
Transformable anisotropic 3D penta-mode metamaterial
Zhou Hu#, Zhibo Wei#, Kun Wang, Yan Chen*, Rui Zhu*, Guoliang Huang, Gengkai Hu. Engineering zero modes in transformable mechanical metamaterials. Nature Communications, 2023, 14(1): 1266. (https://doi.org/10.1038/s41467-023-36975-2)
Zhibo Wei#, Zhou Hu#, Rui Zhu*, Yan Chen*, Gengkai Hu. A transformable anisotropic 3D penta-mode metamaterial. Materials & Design, 2023, 234: 112306. (https://doi.org/10.1016/j.matdes.2023.112306)
4 Multi-stable metastructures
4.1 Curved-crease origami with multi-stability
A design method was proposed to guide the formation of curved-crease origami structures through constrained boundaries, enabling the construction of a series of tubular origami configurations with various cross-sectional shapes. Under boundary constraints forming a Sarrus linkage composed of planar facets, the curved facets were found to deviate from generator-based bending modes. Instead, a pair of elastic traveling hinges emerged, analogous to plastic traveling hinges in plasticity mechanics. Based on this deformation mechanism, an analytical model was developed for the uniaxial compression of curved-crease origami structures. Specific positions of these elastic traveling hinges during motion were transformed into physical creases. When the elastic hinges reached these creases, a significant strain energy reduction occurred, generating additional stable states. Using the analytical model and crease transformation strategy, multi-stability was achieved in curved-crease origami units. Furthermore, the number and positions of stable states, as well as the initial peak forces, could be fully programmed.
Curved-crease origami structures with programmable multi-stability
Sibo Chai, Zhou Hu, Yan Chen, Zhong You, Jiayao Ma*. Programmable multi-stability of curved-crease origami structures with travelling folds. Journal of the Mechanics and Physics of Solids, 2024, 193: 105877. (https://doi.org/10.1016/j.jmps.2024.105877)
4.2 Extensible origami structures with multi-stability
A series of multilayer extensible origami structures with square, hexagonal, and octagonal configurations were designed to exhibit multi-stability by introducing additional creases and radial extensions based on traditional wrapping origami. During folding, each layer's panels were sequentially wrapped around a central hub following rotational symmetry from the interior to the exterior, with each added layer introducing an additional stable state. The deformation modes and mechanical responses of the structures were characterized through experimental testing and finite element simulations. The force-displacement curves demonstrated multi-stable behavior, showing progressively increasing local peak forces in successive layers. After accounting for the influence of crease stiffness, the stable states aligned with predictions from the kinematic model, confirming the critical role of delayed folding kinematics in generating multi-stability.
Multi-stability of the extensible origami structures
Kaili Xi#, Sibo Chai#, Jiayao Ma*, Yan Chen*. Multi-Stability of the Extensible Origami Structures. Advanced Science, 2023, 10(29): 2303454. (https://doi.org/10.1002/advs.202303454)
4.3 Bistable mechanism
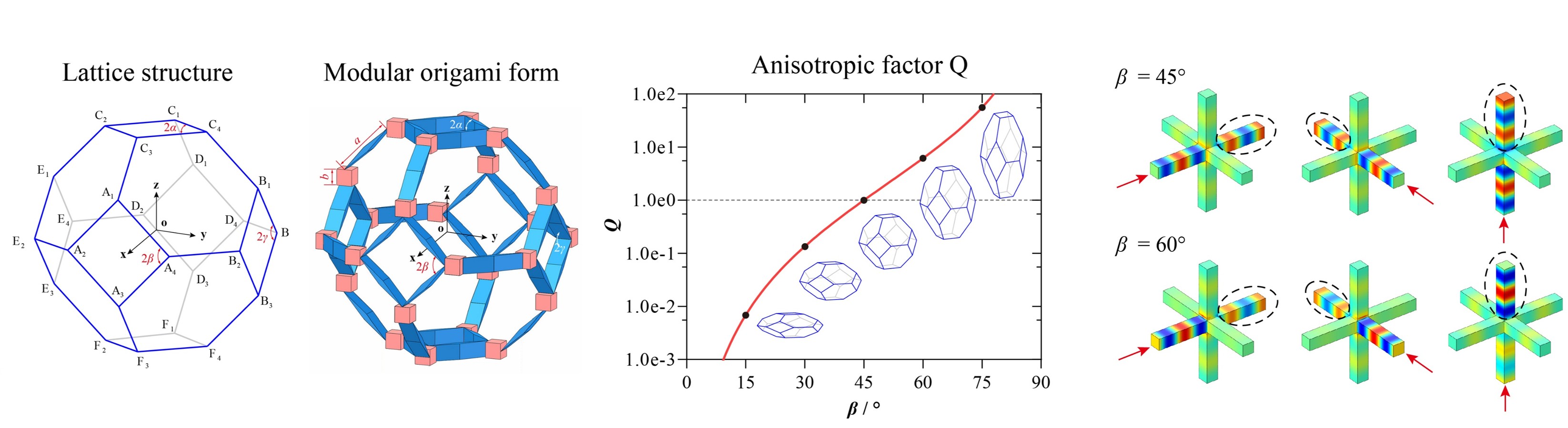
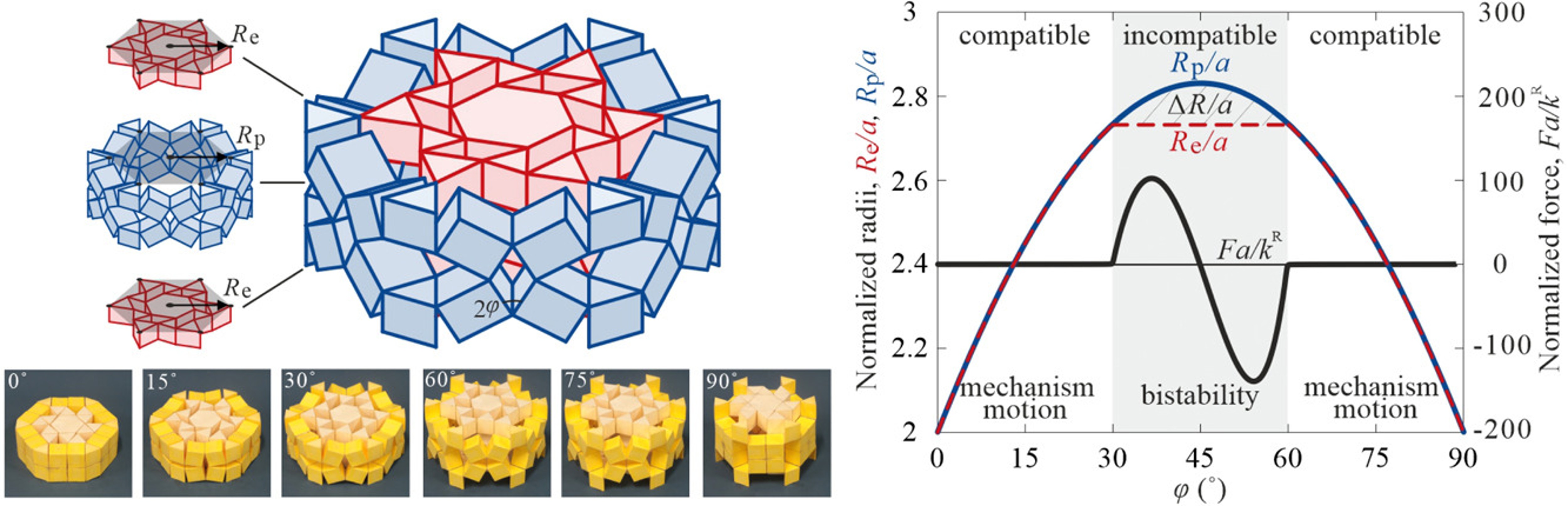
The design strategy of mechanisms was introduced into the study of multistable structures, and the concept of multistable mechanisms was innovatively proposed. A three-dimensional modular metamaterial featuring continuous mechanism motion and bistability was designed. The kinematic model of the metamaterial mechanism was established, and the influence of geometric design parameters on the metamaterial’s motion modes was systematically analyzed. By tuning the geometric parameters, five motion modes were realized: fully compatible, compatible–incompatible–compatible transition, compatible–incompatible transition, incompatible–compatible transition, and fully incompatible. A quantitative relationship between geometric parameters and the degree of motion incompatibility in the metamaterial was obtained. Furthermore, based on the principle of energy minimization, a mechanical theoretical model of the bistable metamaterial was established. The fundamental mechanism by which the metamaterial’s motion incompatibility induces bistable behavior and stiffness jumps was specifically elucidated, and the theoretical model was validated through quasi-static compression experiments.
Bistable mechanism
Jiayao Ma#, Xiaoyi Jiang#, Yan Chen*. A 3D modular meta-structure with continuous mechanism motion and bistability. Extreme Mechanics Letters, 2022, 51: 101584. (https://doi.org/10.1016/j.eml.2021.101584)
4.4 Tristable metastructure
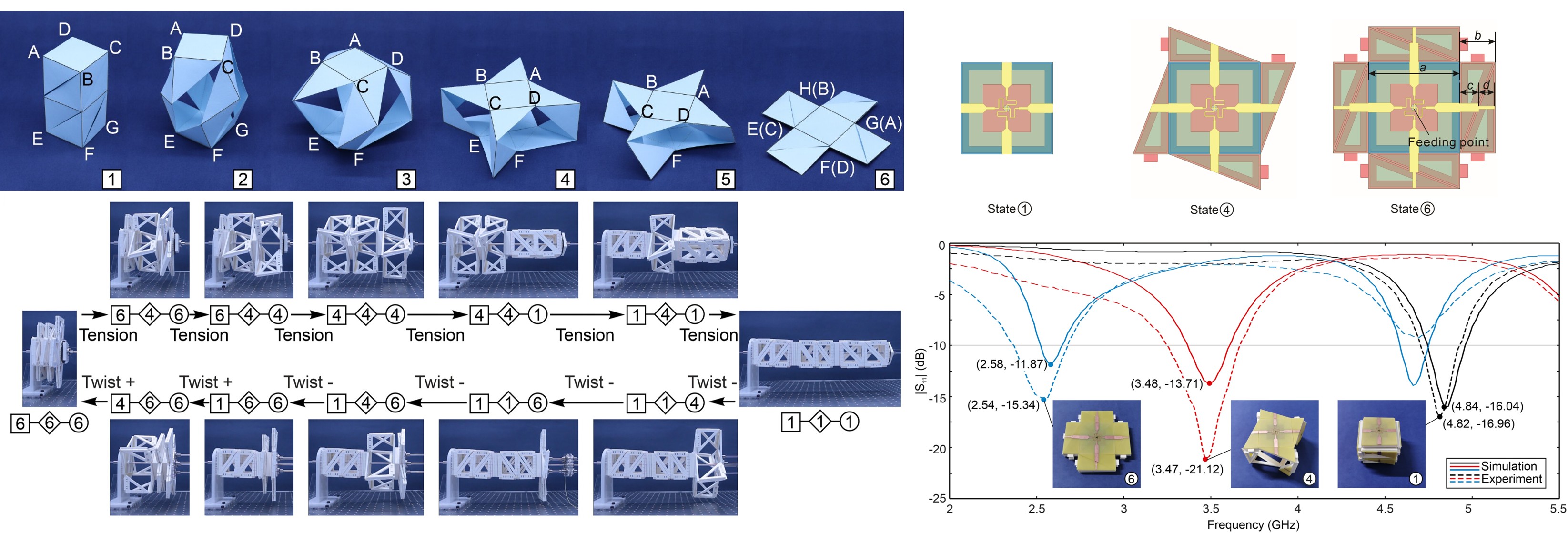
Starting from cuboid origami structures, new deployable kirigami architectures were designed by introducing crease and cut patterns on their lateral faces. Based on the geometric angular characteristics of the deployable kirigami structures in three typical states, a set of novel elastic hinges with specific effective motion ranges was developed. By integrating the kirigami cuboid and elastic hinge technologies, a novel tristable unit was successfully constructed. Further, taking the tristable structure as the basic unit, a variety of multistable superstructures with the same rotation direction, different rotation direction, the same geometric parameters, different geometric parameters, and a different number of units are designed in series. Finally, the team carried out the application research of tristable structure on frequency reconfigurable antenna and designed a frequency reconfigurable antenna that can realize 5G three-band communication through parameter analysis method. The working frequencies of its three stable states are concentrated at 4.84GHz, 3.48GHz, and 2.58GHz, respectively.
Tristable metastructure
Xiao Zhang, Jiayao Ma, Mengyue Li, Zhong You, Xiaoyan Wang, Yu Luo, Kaixue Ma, Yan Chen*. Kirigami-based metastructures with programmable multistability. Proceedings of the National Academy of Sciences of the United States of America, 2022, 119(11): e2117649119. (https://doi.org/10.1073/pnas.2117649119)