Mechanism design is a core research field in mechanical engineering. Overconstrained linkages are a unique type of spatial mechanisms which do not satisfy the Kutzbach mobility criterion, yet they are mobile throughout the complete motion process due to the special geometric properties of joints connecting their links. Meanwhile, they have been widely utilized in the field of engineering structures, mainly due to advantages of structural stiffness, simple construction, and reliability.
1 New Spatial Overconstrained Linkages
Two construction methods for spatial overconstrained linkages were proposed by removing common link pairs and common linkages in assemblies of combined linkages. Then, new types of overconstrained linkages were invented, including back-to-back double Goldberg linkages, extended Myard linkages and mixed double-Goldberg linkages. For example, the mixed double-Goldberg linkage, a new type of 1-DOF overconstrained 6R linkage, was constructed by utilizing the combining of a subtractive Goldberg 5R linkage and a Goldberg 5R linkage.
Yan Chen, Zhong You*. An extended Myard linkage and its derived 6R linkage. Trans. ASME. Journal of Mechanical Design, 2008, 130(5), 052301. (http://dx.doi.org/10.1115/1.2885506 )
Chaoyang Song, Yan Chen*. A family of mixed double-Goldberg 6R linkages. Proceedings of the Royal Society A-Mathematical, Physical and Engineering Sciences, 2012, 468, 871-890. (http://dx.doi.org/10.1098/rspa.2011.0345)
Zhong You and Yan Chen, Motion Structures: Deployable Structural Assemblies of Mechanisms, Taylor and Francis, ISBN: 978-0-415-55489-3, 2011. [PDF]
2 Kinematics of Spatial Overconstrained Linkages
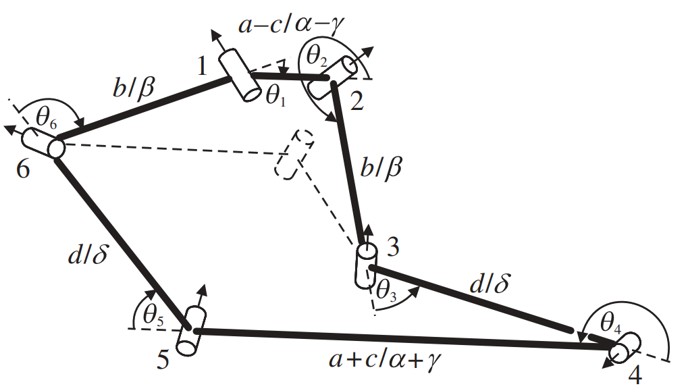
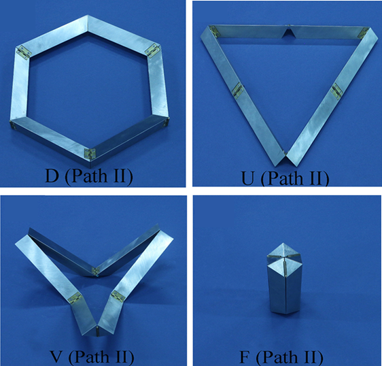
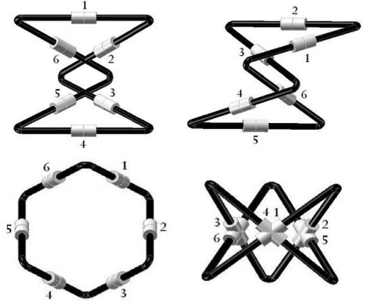
Based on the kinematic analysis of the threefold-symmetric Bricard linkage, a systematic study of its configuration variations was carried out, revealing that this threefold-symmetric Bricard linkage exhibits both a compactly folded state and a fully unfolded hexagonal state. In addition, two independent explicit solutions to closure equations of the line-symmetric Bricard linkage were derived, corresponding to two closure forms which are not mutually transferable. Furthermore, the line-symmetric octahedral Bricard linkage was treated as a special case of the general line-symmetric Bricard linkage, and a line-symmetric Bricard octahedral mechanism with both mechanism and structural configurations was obtained, in which the characteristics of these closed configurations were analysed under different parameter conditions.
Threefold-symmetric Bricard linkage
General line-symmetric Bricard linkage
Line-symmetric octahedral Bricard linkage
Yan Chen, Zhong You, Tarnai Tibor*. Threefold-symmetric Bricard linkages for deployable structures. International Journal of Solids and Structures, 2005, 42 (8) 2287-2301. (http://dx.doi.org/10.1016/j.ijsolstr.2004.09.014 )
Fufu Yang, Zhong You, Yan Chen*. Foldable hexagonal structures based on threefold-symmetric Bricard linkage. Trans. ASME. Journal of Mechanisms and Robotics, 2020, 12(1): 011012. (https://doi.org/10.1115/1.4045039)
Chaoyang Song, Yan Chen*, I-Ming Chen. Kinematic study of the original and revised general line-symmetric Bricard 6R linkages. Trans. ASME. Journal of Mechanisms and Robotics, 2014, 6(3), 031002. (http://dx.doi.org/10.1115/1.4026339 )
3 Bifurcation and Reconfiguration of Spatial Overconstrained Linkages
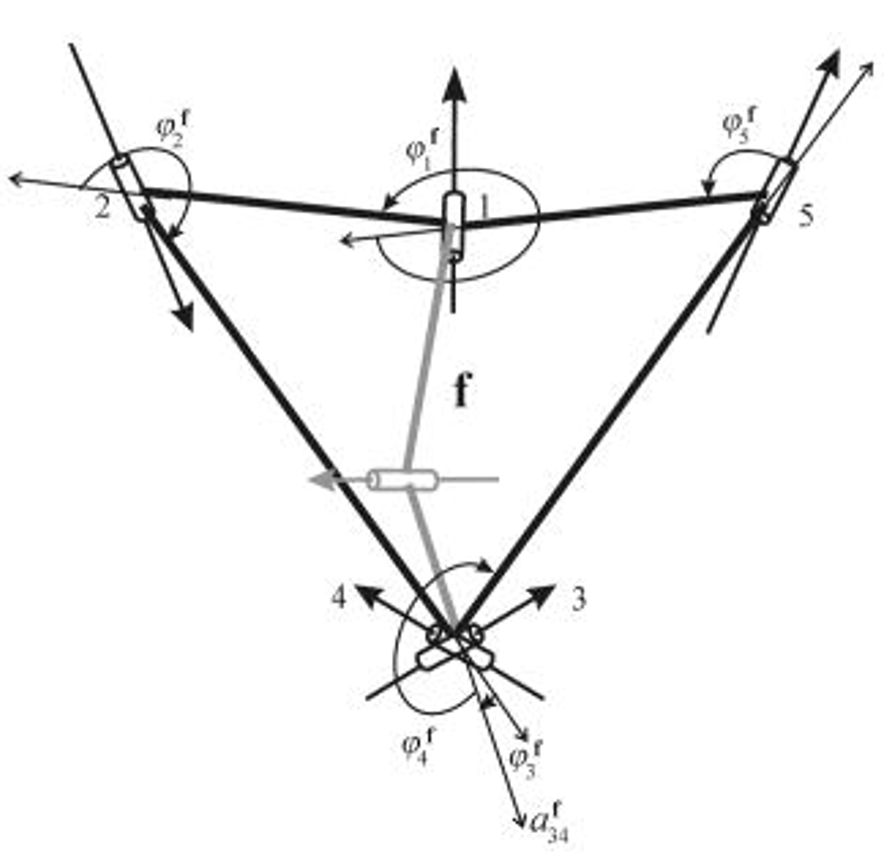
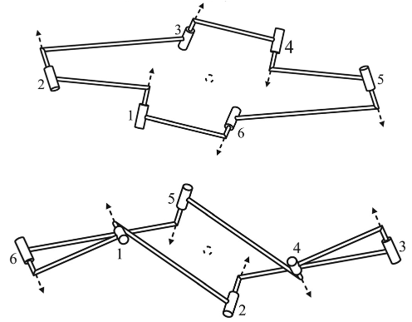
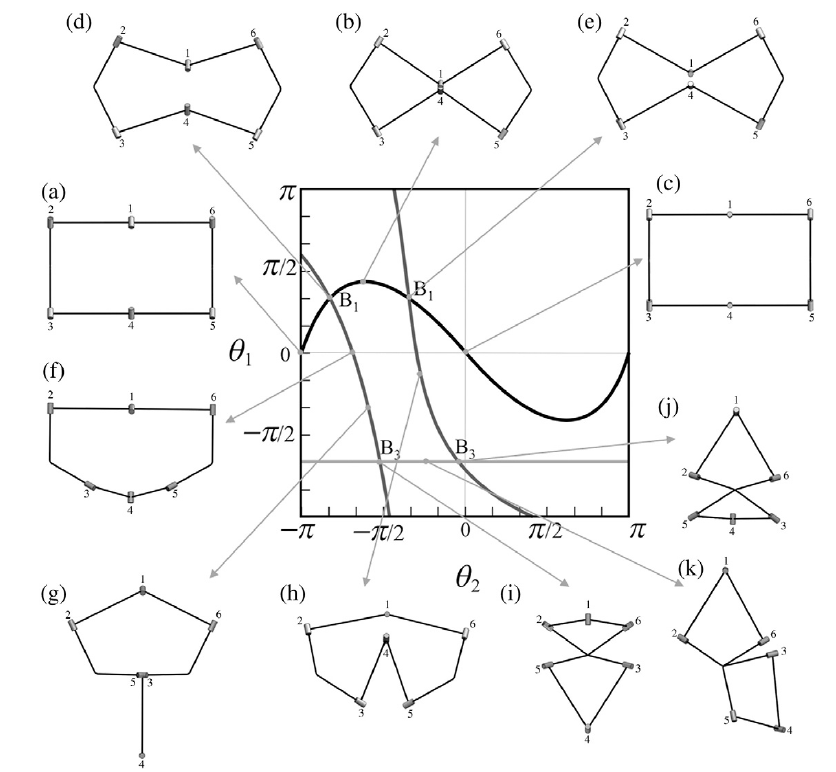
Two approaches to achieve reconfiguration of spatial overconstrained linkages were proposed, which were realized by utilizing bifurcation behaviors or designing a new reconfigurable mechanism. On one hand, singularity of the line- and plane-symmetric Bricard linkages was investigated by means of singular value decomposition theory, the bifurcation point of spatial overconstrained linkages determined by the rank of singular values in their Jacobian matrices, and numerous motion paths and bifurcation points of line- and plane-symmetric Bricard linkages were derived, resulting in the discovery of a bifurcation closure loop. On the other hand, a reconfigurable mechanism was generated from a network of four Bennett linkages, and five Bennett-based overconstrained linkages were achieved by modifying the mobile joints, which revealed the intrinsic relationship between various Bennett-based overconstrained linkages.
Bifurcation closure loop of a line- and plane-symmetric Bricard linkage
Chaoyang Song, Yan Chen*,I-Ming Chen. A 6R linkage reconfigurable between the line-symmetric Bricard linkage and the Bennett linkage. Mechanism and Machine Theory, 2013, 70, 278-292. ( http://dx.doi.org/10.1016/j.mechmachtheory.2013.07.013 )
Huijuan Feng, Yan Chen*, Jian Sheng Dai, Grigore Gogu. Kinematic study of the general plane-symmetric Bricard linkage and its bifurcation variations. Mechanism and Machine Theory, 2017, 116, 89–104. (http://dx.doi.org/10.1016/j.mechmachtheory.2017.05.019)
Chaoyang Song, Huijuan Feng, Yan Chen*, I-Ming Chen, Rongjie Kong. Reconfigurable mechanism generated from the network of Bennett linkages. Mechanism and Machine Theory, 2015, 88, 49-62. (http://dx.doi.org/10.1016/j.mechmachtheory.2015.02.003)
Weiqi Liu, Yan Chen*. A double spherical 6R linkage with spatial crank-rocker characteristics inspired by kirigami. Mechanism and Machine Theory, 2020, 153: 103995. (https://doi.org/10.1016/j.mechmachtheory.2020.103995)
4 Truss Method for Kinematic Analysis of Spatial Overconstrained Linkages
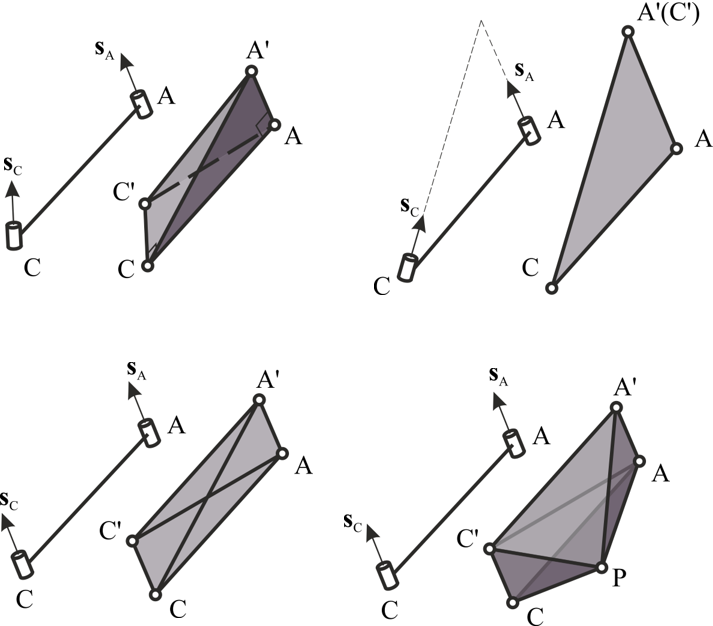
By combining mechanism theory and structural mechanics, the kinematic properties of spatial mechanisms were investigated including mobility, motion path, and bifurcation behavior. A general truss transformation method based on the equivalence between spatial linkages and their truss forms was proposed, which provided a new way to analyze the kinematic properties of mechanisms with complicated topologies. We proposed a framework to obtain the non-overconstrained forms of its corresponding overconstrained Bennett and Myard linkages, which resolved the conflict between accuracy and compatibility in the assembly of the mechanism, leading to a great potential for future applications in deployable structures.
Truss Method
Non-overconstrained form of Bennett linkage
Fufu Yang, Yan Chen*, Kang R, Ma J. Truss transformation method to obtain the non-overconstrained
forms of 3D overconstrained linkages. Mechanism and Machine Theory, 2016, 102, 149–166. (http://dx.doi.org/10.1016/j.mechmachtheory.2016.04.005)
5 Overconstraint reduction of multiloop overconstrained mechanisms
A systematic method for the overconstraint reduction of multiloop overconstrained mechanisms was proposed by extracting Hamiltonian paths from topological graphs of deployable polyhedral mechanisms. Firstly, for the only Hamilton path remaining in the equivalent topological graph of the tetrahedral mechanism, the simplest constraint form with a single DOF was obtained by removing the topological elements other than this path, in which the degrees of overconstraint are greatly reduced from 19 to 7. Next, for the cubic mechanism, the overconstraints were reduced from 43 to 13 by investigating two Hamiltonian paths in its dual octahedron. Finally, seventeen different Hamiltonian paths in the complex dodecahedral mechanism were discussed in detail, and the overconstraints were reduced from 115 to 31. The proposed overconstraint reduction method based on the Hamiltonian path greatly reduced the overconstraint of multiloop mechanisms while maintaining kinematic equivalence.
Overconstraint reduction of the tetrahedral mechanism