|
New Publication: Mobile assemblies of four-spherical-4R-integrated linkages and the associated four-crease-integrated rigid origami patterns
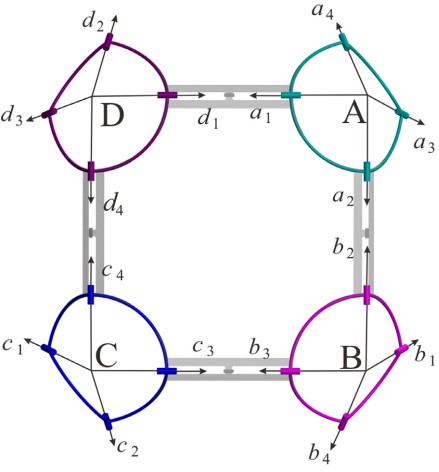
From: Date: 2019-10-08 Origami is the traditional art of paper folding into sculpture, and rigid origami is a particular form of origami in which each surface surrounded with crease lines is not stretching and bending. Hence, by taking the panels as links and the creases as revolute joints, a degree-4 rigid origami vertex can be regarded as a spherical 4R linkage, and an rigid origami pattern formed by degree-4 vertexes can be regarded as a mobile assembly of spherical 4R linkages. Rigid origami patterns can therefore be obtained according to the kinematical analysis of spherical linkages. However, the method mentioned above requires solution of complex nonlinear equations, which may limit the design of rigid origami patterns. Simplifying the mechanism model of rigid origami patterns is helpful to solve the problem.
a single loop formed by four identical spherical 4R linkages
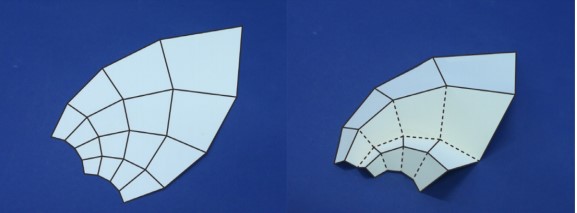
a novel rigid origami pattern (the helical pattern)
This paper provides a novel approach for generating new rigid origami patterns which can lead to the development of foldable structures and tessellations with potential applications in robotics, smart architectures, mechanical metamaterials and space exploration.
|