|
New Publication: Mobile Assembly of Two Bennett Linkages and Its Application to Transformation Between Cuboctahedron and Octahedron
From: Date: 2020-01-02 Bennett 4R linkage, a classic overconstrained one, could realise complex spatial motions with the least links in 3D space, it hence has attracted lots of attentions in mechanism. To get larger and realise more complex deployable structures, lots of Bennett 4R linkages are expected to be connected as mobile assemblies with one DOF. While, all of these existed assemblies were constructed by tessellation, and they hence could not realise deployable polyhedrons.
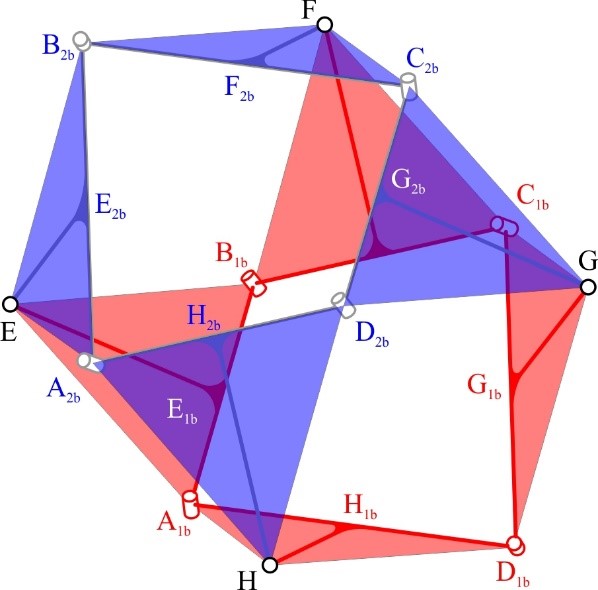
A mobile assembly constructed with two Bennett linkages
The linkage composed with triangular links
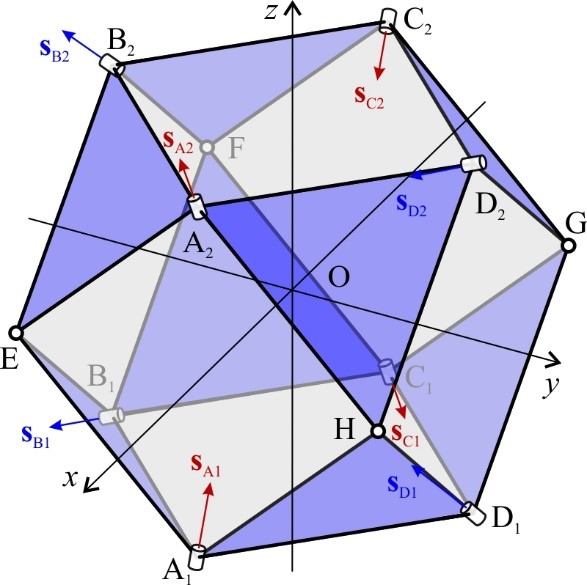
The transformable polyhedron
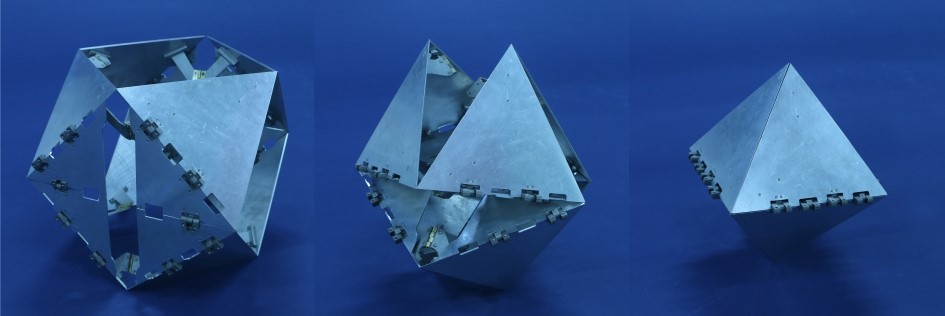
Physical model of the transformable polyhedron
According to the symmetric feature of two identical Bennett 4R linkages, the geometric conditions to construct a one-DF assembly with four spherical joints were derived. Then, the authors realised the transformation between cuboctahedron and octahedron with one DOF. The directions of revolute joints were obtained by studying the geometric properties of the deployed and the folded configurations, i.e., cuboctahedron and octahedron. Although the symmetries of the polyhedrons are broken, it is indeed with one DOF and with no bifurcation, which were demonstrated by the kinematic analysis and the truss-transformation method. Finally, a physical model was fabricated to verify the results.
Fufu Yang, Zhong You, Yan Chen, 2020, Mobile Assembly of Two Bennett Linkages and Its Application to Transformation Between Cuboctahedron and Octahedron, Mechanism and Machine Theory 145, 103698.
|