|
New Publication: A double spherical 6R linkage with spatial crank-rocker characteristics inspired by kirigami
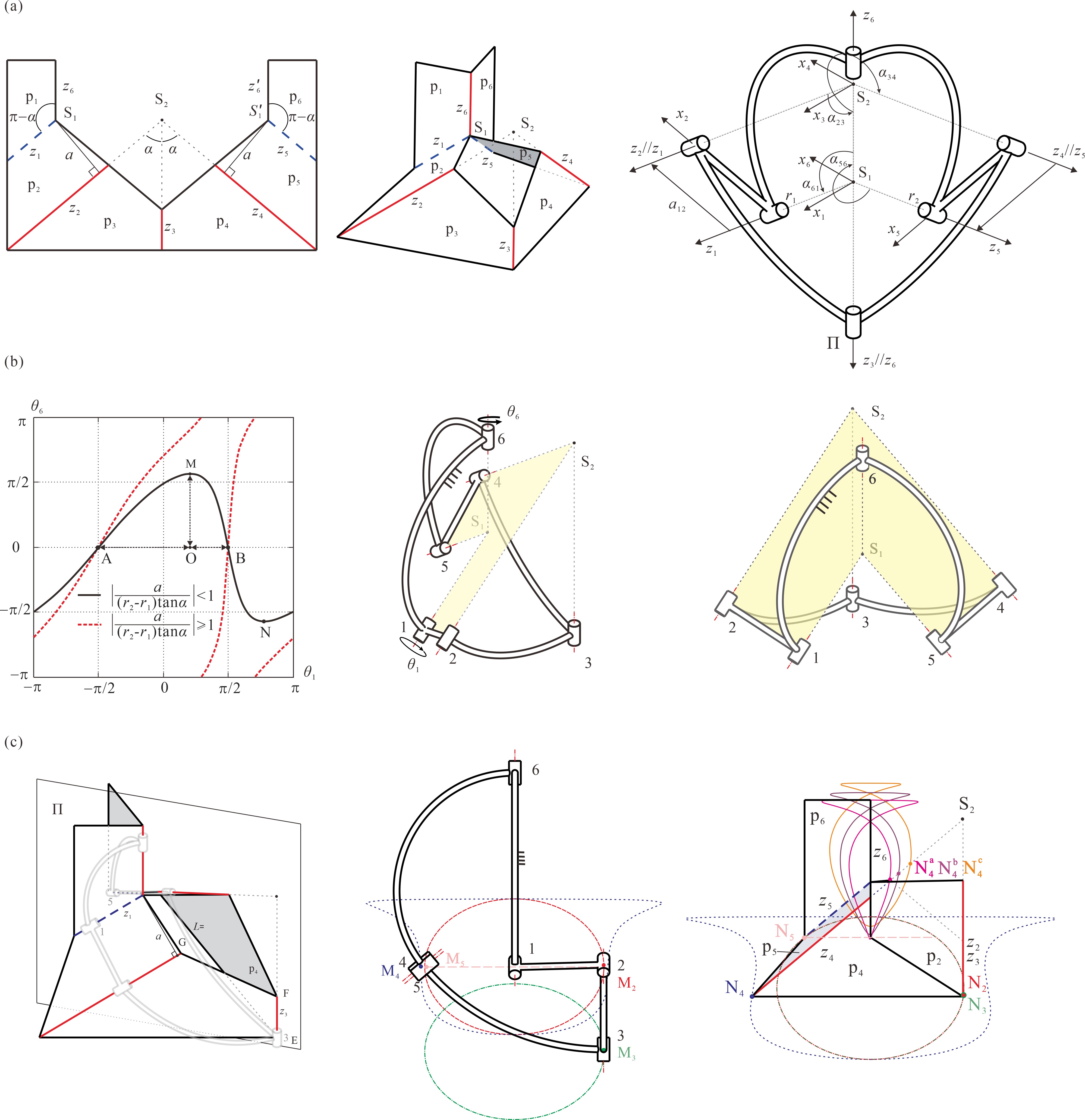
From: Date: 2020-11-25 The planar crank-rocker linkage is the basic form of the four-bar linkage. It transforms a continuous rotary motion to an oscillatory motion and has a wide range of applications in engineering practice, such as shaper, radar, sewing machine, etc. Based on the planar crank-rocker linkage, complex spatial multi-bar linkages with special trajectory (8-shaped) were synthesized to design the transmission mechanism of flapping wing aircraft. Meanwhile, the spatial RSSR linkages with crank-rocker characteristics also have similar trajectories, but ball joints are used as the connections in those linkages, which is easy to be worn and difficult to be manufactured and miniaturized. The synthesis of crank-rocker linkages with more than four links is still an attractive and challenging problem nowadays.
(a) The kirigami pattern and its equivalent double spherical linkage;(b) the characteristics of crank-rocker;(c) trajectories of points on the linkage and its kirigami form
Crank-rocker linkage (left) & Double crank linkage (right)
This work sets up the bridge between the spatial linkages and rigid kirigami forms to develop emerging kinematic behaviours. The results were accepted by Mechanism and Machine Theory on Jun. 24, 2020.
Weiqi Liu, Yan Chen. A double spherical 6R linkage with spatial crank-rocker characteristics inspired by kirigami. Mechanism and Machine Theory, 2020, 153: 103995.
|