|
New publication:A Humidity-powered Soft Robot with Fast Rolling Locomotion
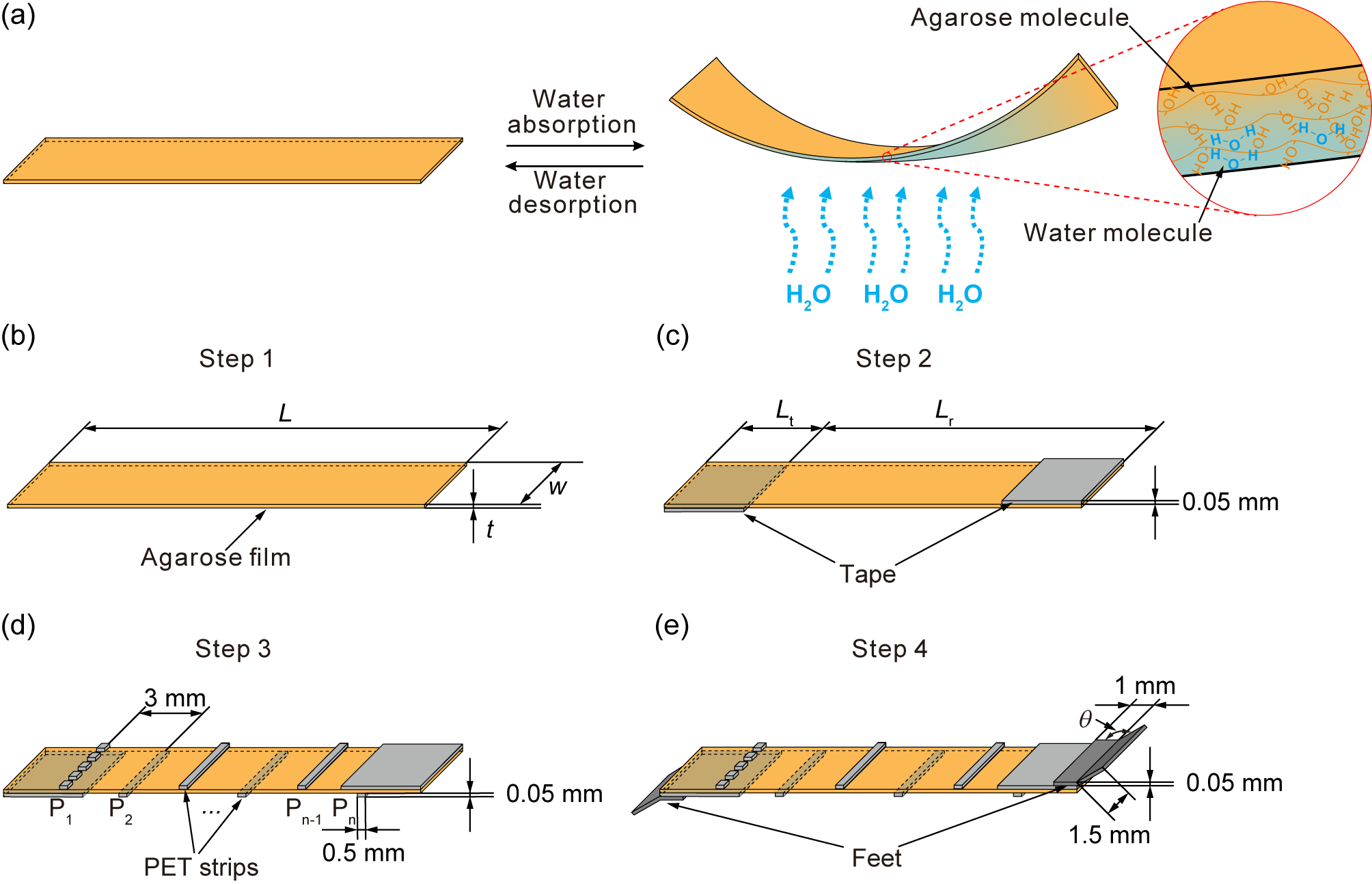
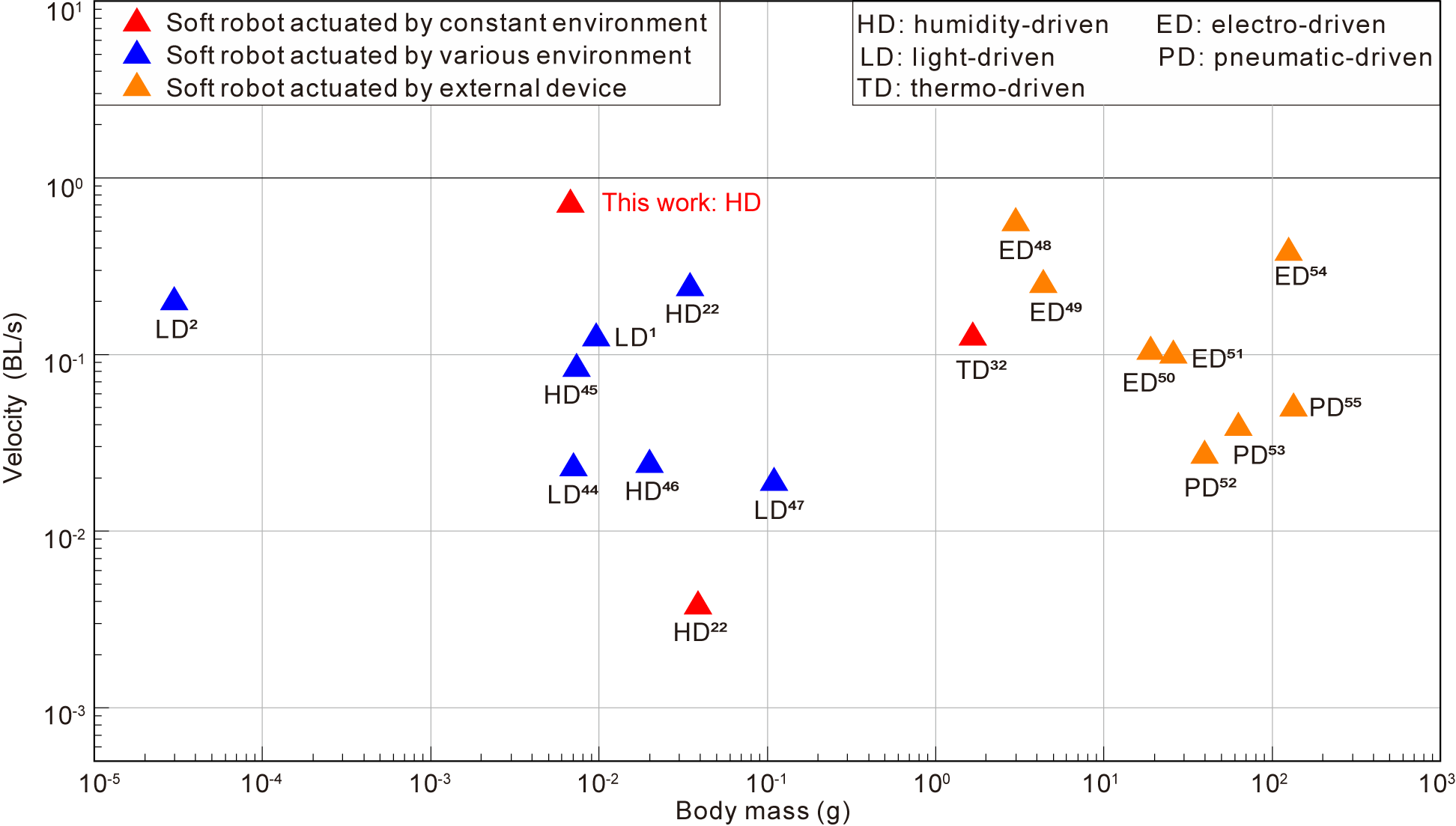
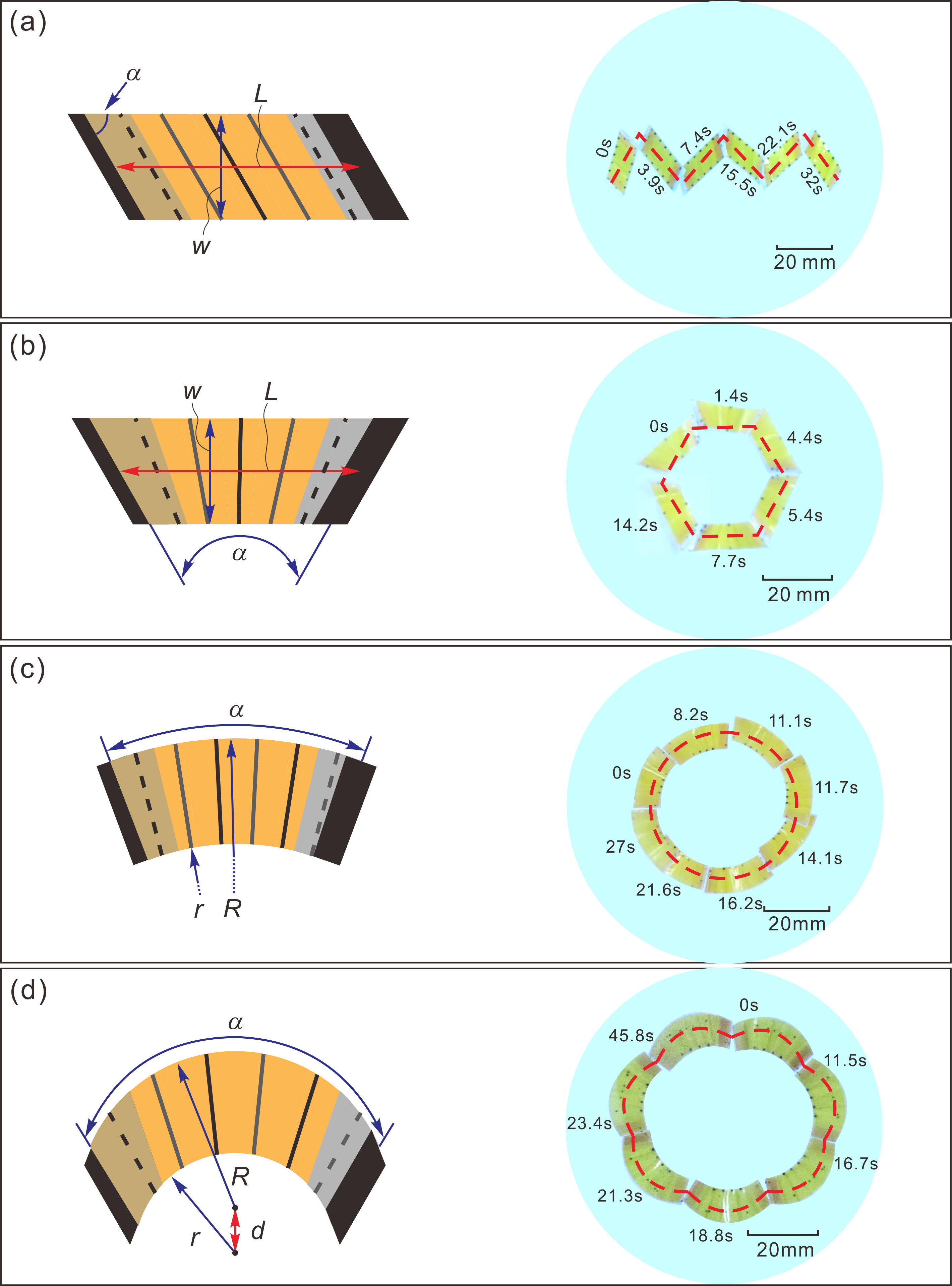
From: Date: 2022-05-31 Through interdisciplinary collaboration, Prof. Lei Zhang at School of Chemical Engineering and Prof. Yan Chen at School of Mechanical Engineering from Tianjin University developed such a soft robot called the Hydrollbot by using a humidity-sensitive agarose film that achieved continuous fast self-rolling locomotion in a constant-humidity environment. As the optimized Hydrollbot had velocity of 0.714 BL/s in a straight line, it increased the speed of soft robots that moved in a constant-humidity environment by two magnitudes and was much faster than current reported soft robots actuated by a variable-humidity environment. Meanwhile, the Hydrollbot was capable of carrying a payload up to 100% of its own weight, and the trajectory of the Hydrollbot could be programmed. The results were published in Research with the title “A Humidity-powered Soft Robot with Fast Rolling Locomotion” on May 14th, 2022 (Research, 2022, 9832901, DOI: 10.34133/2022/9832901). 1. Background The soft robots actuated by the environment can respond to light, heat, chemical substances, magnetic fields, humidity and other stimuli to achieve specific locomotion and functions, which become a research trend in the area of robotics. The greatest challenge in their design is the integration of the actuator, energy sources and body of robots while achieving fast locomotion and well-defined programmable trajectories under constant conditions without the need for an externally modulated stimulus. To tackle this problem, the authors developed such a soft robot called the Hydrollbot, by using a humidity-sensitive agarose film and overcoming the isotropic and random bending of the film, that achieved continuous fast self-rolling locomotion with a programmable trajectory in a constant-humidity environment. 2. Progress The authors first designed the structure of the robot (Figure 1). To avoid the random twisting of the isotropic film, polyethylene terephthalate (PET) strips were attached to both sides of the film. Two V-shaped PET sheets were attached to both ends of the film to function as the feet of the robot, increasing friction and avoiding the possibility of reverse movement. Figure 1. Design of the Hydrollbot Under the effect of the bending deformation caused by water absorption and its own gravity, the robot achieved continuous fast self-rolling locomotion in a constant-humidity environment (Figure 2). Figure 2. Rolling process of the Hydrollbot with velocity of 0.714 BL/s Utilizing a simplified analytical model to estimate the locomotion speed of the robot (Figure 3), the authors found that the locomotion speed increased with film length and humidity, while reduced with film thickness and tape length. Figure 3. Analytical model of the Hydrollbot As the optimized Hydrollbot had weight of 6.8 mg and velocity of 0.714 BL/s in a straight line, it was faster than current reported humidity-responsive soft robots (Figure 4) and much faster than most of soft robots actuated by various environments. Meanwhile, the Hydrollbot was capable of carrying a payload up to 100% of its own weight (Figure 5). Figure 4. Velocity of soft robots vs. body mass Figure 5. Rolling process of the Hydrollbot with 100% payload Finally, the trajectory of the Hydrollbot could be programmed simply by changing the robot geometry (Figure 6). The rolling direction could be changed by designing the shape of the film and the positions of the feet. In addition, the bending direction of the film could be controlled by adjusting the relative positions of the PET strips. Figure 6. Programmable trajectories of the Hydrollbots 3. Prospect This work provides a new idea of interdisciplinary research in the structural design of soft robots actuated by the environment, and is expected to advance the applications of humidity-driven soft robots in medical treatment, sensing, actuation, and so on. Future research will focus on the design of more advanced Hydrollbot structures that can autonomously perform complex locomotion paths. Moreover, incorporation of new materials may enable the Hydrollbot responsive to multiple stimuli and with more intelligent and reliable performance. 4. Author introduction Prof. Lei Zhang is full professor at the Department of Biochemical Engineering, School of Chemical Engineering, Tianjin University, and member of the National Science Fund for Distinguished Young Scholars. His research areas cover biochemical and synthetic biology, cryogenic protection, functional materials, marine coatings, etc. He has published more than 100 papers in journals including Nature Biotechnology, Nature Communications, JACS, AIChE Journal, CES, etc. Prof. Yan Chen is full professor at School of Mechanical Engineering, Tianjin University, and member of the National Science Fund for Distinguished Young Scholars. Her research areas cover fundamental theories of kinematics, deployable structures, metamaterials and their engineering applications in aerospace, robotics, and medical foldables. Her representative papers were published in top journals such as Science, PNAS, etc. |