|
Professor Marcelo Diaz from University of Edinburgh and Professor Li Wen from Beihang University visited MSL
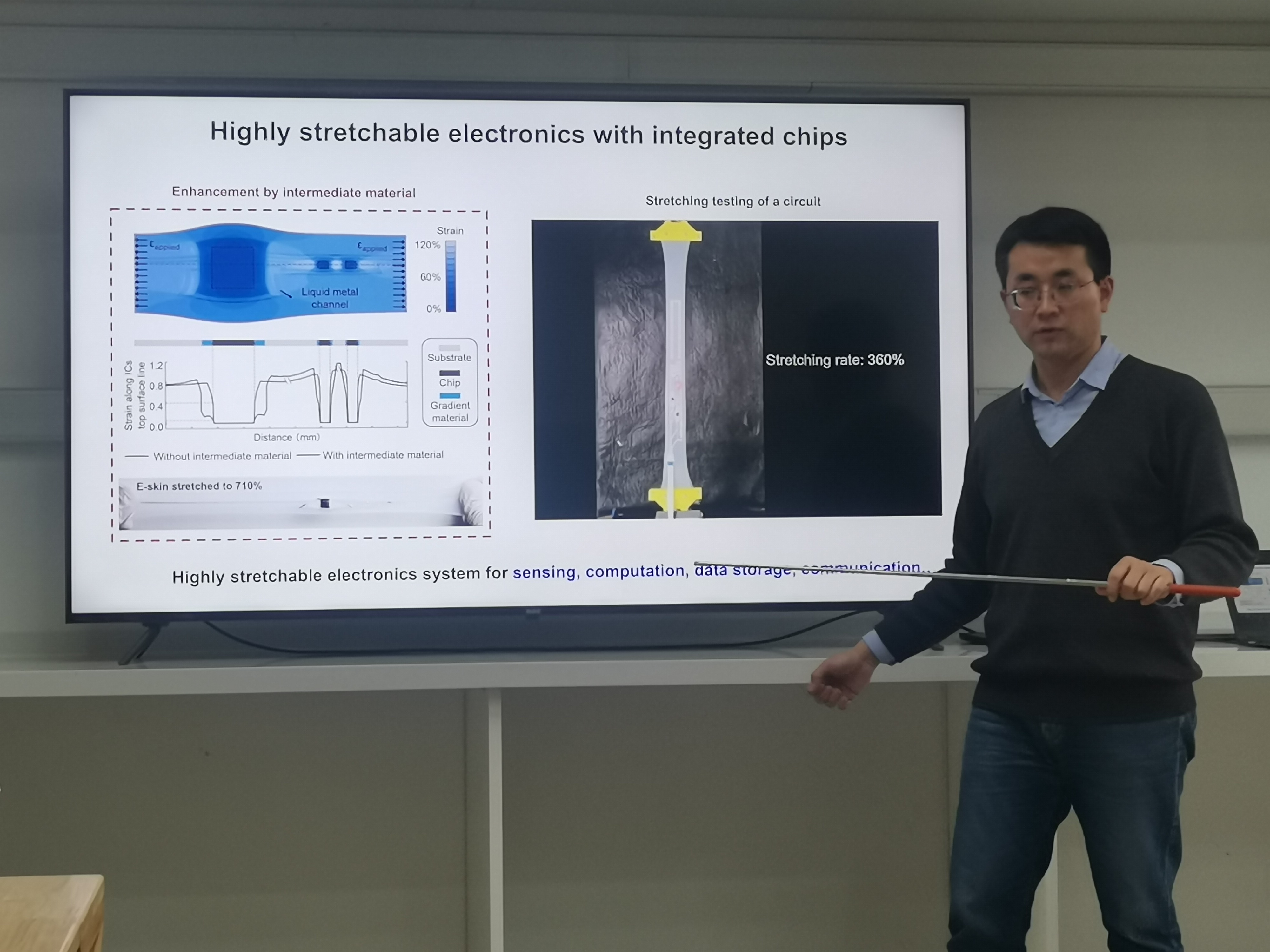
From: Date: 2023-12-07 On Dec. 7th, 2023, Professor Marcelo Diaz from University of Edinburgh and Professor Li Wen from Beihang University visited Motion Structures Laboratory of Tianjin University, invited by Professor Yan Chen. Prof. Diaz gave an interesting lecture entitled “On the mechanics of kirigami structures”. Kirigami, an ancient art of paper cutting, inspires new ways to tailor the morphology and the mechanics of thin elastic sheets. It has been found to be of special relevance to applications in reconfigurable structures (e.g., large deployable structures) and microstructures (e.g., stretchable electronics). Indeed, careful tailoring of cut patterns results in structures with interesting non-linear macroscopic responses emerging from local instabilities. In this presentation, local effects in Kirigami are discussed by focusing attention on the study of the deformation of a thin sheet with a single cut—i.e., the most basic and fundamental geometric building block of Kirigami. A new phenomenon is also discussed that arises when Kirigami sheets interact with a liquid substrate, namely elastocapillary kirigami. The effects of a liquid foundation and how it changes the nature of the local instabilities are studied. Analysis reveals that post-buckling configurations displays two types of a phase transitions: continuous (second order phase transition), which suggests a uniform phase; and a discontinuous transition (first order), leading to a phase propagation through kirigami structures. Prof. Wen gave an interesting lecture entitled “Octopus-inspired soft robots for environmental interaction”. The research is inspired by that Octopuses can whip their soft arms with a characteristic “bend propagation” motion to capture prey with sensitive suckers. Based on that, an electronics-integrated soft octopus arm (E-SOAM) is implemented, capable of reaching, sensing, grasping, and interacting in a large domain. E-SOAM’s distal part plays the role of a gripper and can process bending, suction, and temperature sensory information under highly deformed working states by integrating a stretchable, liquid-metal–based electronic circuit to autonomously perform tasks in a confined environment. The gripper also integrates intelligent adsorption material, which can adjust the material stiffness through heating, improve the adhesion between the suction part and the grabbing object, greatly improve the suction force. Through a wearable finger glove that produces suction sensations, a human can use just one finger to remotely and interactively control the robot’s in-plane and out-of-plane reaching and grasping both in air and underwater. Apart from that, Prof. Wen also introduced a touchless soft robots control method, which achieves interactive teaching of soft robots without touching the robot, through electrostatic induction between the interaction interface and the human hand. During the lectures, Professor Marcelo Diaz and Professor Li Wen answered questions raised by the audience, further deepening our understanding and providing us with updated perspectives and broader ideas for our future research. |