|
New Publication: Reconfigurable thick-panel origami tube
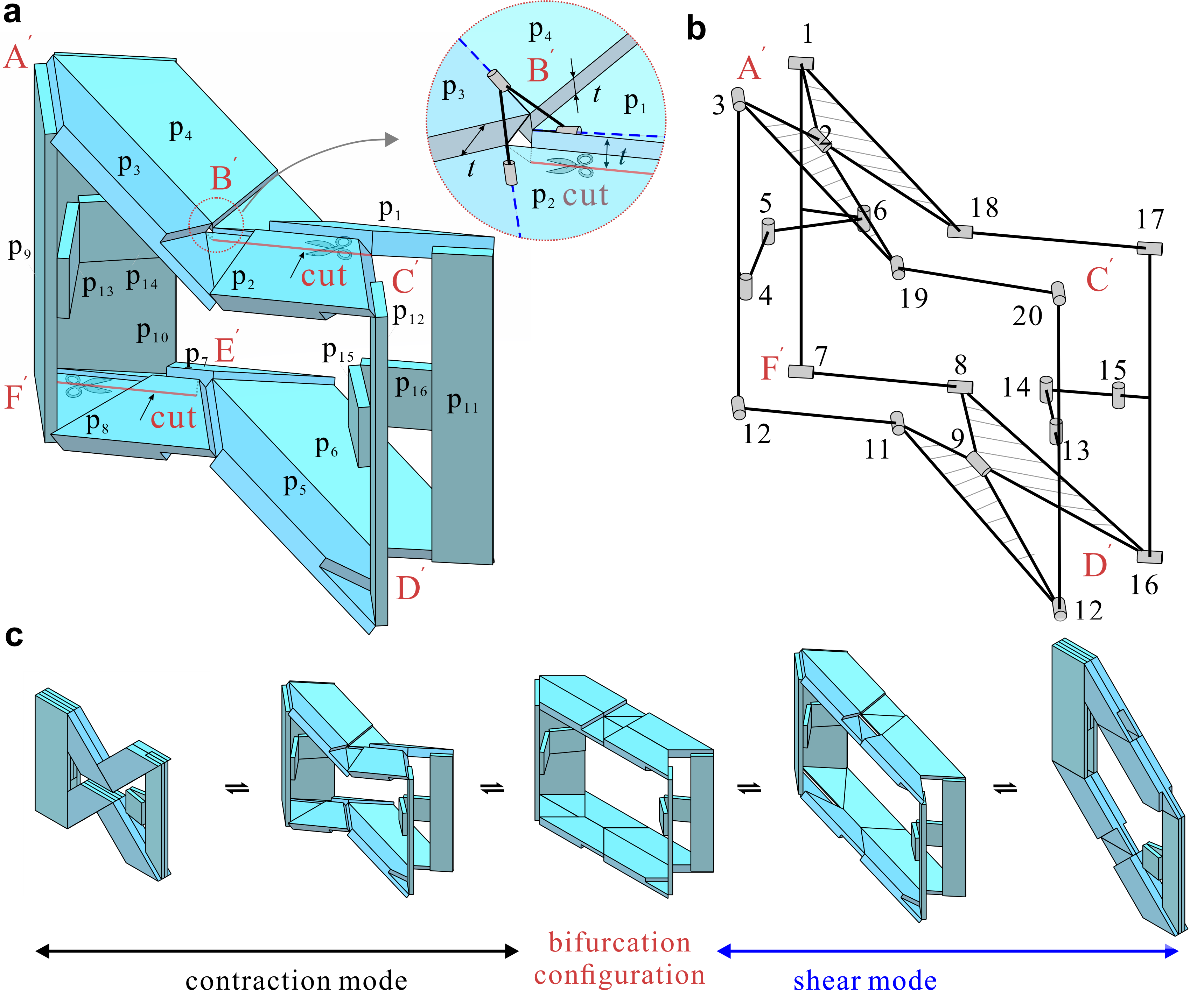
From: Date: 2024-04-22 Variable crease origami that exhibits crease topological morphing allows a given crease pattern to be folded into multiple shapes, greatly extending the reconfigurability of origami structures. However, it is a challenge to enable the thick-panel forms of such crease patterns to bifurcate uniquely and reliably into desired modes. Fig. 1. Zero-thickness origami tube with kinematic bifurcation Such powerful reconfigurability confers extra motion modes to the stacked origami tubes with one DOF. However, the increased instantaneous DOFs, the overlapping motion curves and the homogeneous bifurcation configurations in Fig.1 further suggest that it is difficult to predict the system’s behavior at the bifurcation point. Forcing the tube into a particular configuration after reaching the bifurcation point can be challenging, e.g., making the tube switch from the nested configuration i in contraction modes to inclined-down configuration v in shear mode. Fig. 2. Construction of thick-panel forms for the tube without reconfigurability To solve this problem, the team employ a kirigami technique by removing the crease connecting panels p1 and p2 at vertex B' and the crease connecting panels p7 and p8 at vertex E`. Then two rectangular panels p15 and p16 with thickness t are introduced to connect panels p12 and p11. Employing a similar strategy, rectangular panels p13 and p14 with thickness t connect panels p9 and p10. Eventually, a model of the thick-panel tube with cuts in Fig. 3 is established, which not only enables compact folding, but also obtains the desired reconfiguration between nested configuration i with contraction modes and inclined-down configuration v with shear mode, as demonstrated by the one DOF folding sequence of model in Fig. 3. Fig. 3. Construction of thick-panel forms for the tube with reconfigurability Figure 4 and video 1 illustrate the reconfiguration process of the prototype under a single driver (6V 15kg RC Digital Servo). By controlling the direction or range of rotation of the motor, they have achieved not only the folding and unfolding process of this reconfigurable unit, but also the reliable bifurcation control. In addition to configuration i, the other three configurations ii, iii, and iv in contraction mode, also allow bifurcation into inclined-down configuration v in shear mode, by setting the position of the cut at creases and the tabs on the panels. Fig. 4 Reconfiguration between desired modes under a single actuator
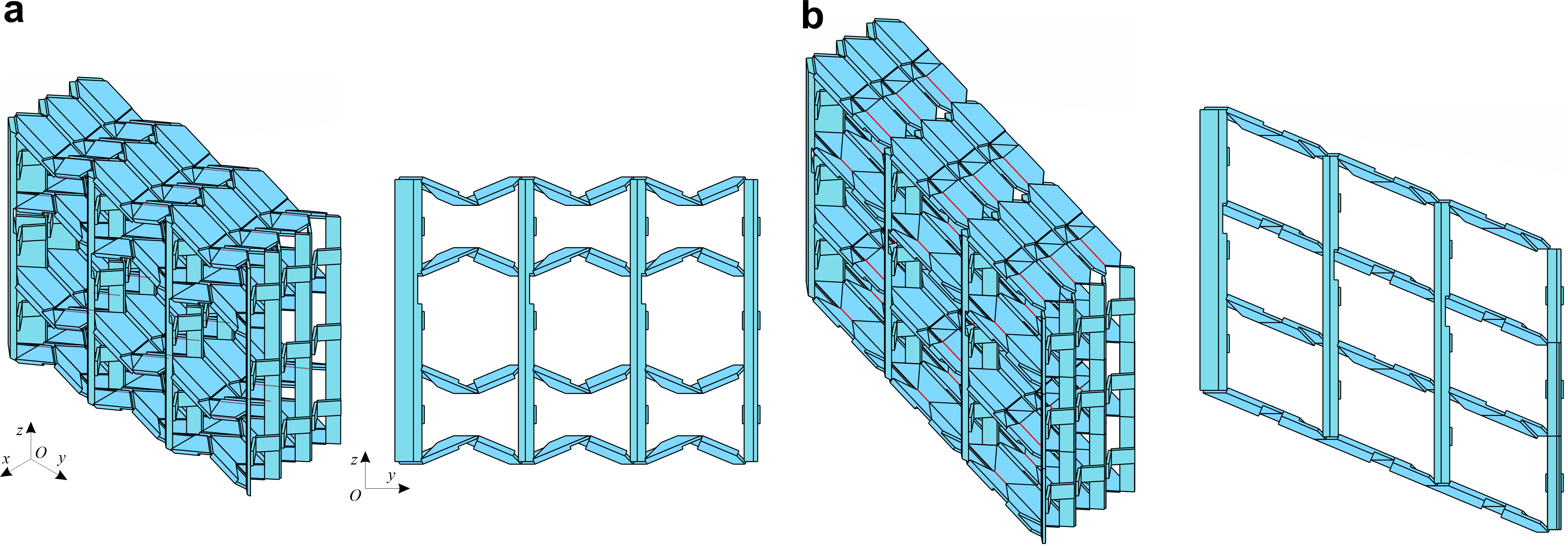
Video 1 Reconfiguration between desired modes under a single actuator Lastly, the stacked origami tube with thick panels can be tessellated in three-dimensional space as shown in Fig. 5. These compatible tessellations preserve the kinematic properties of origami units. On the one hand, they have a one-DOF rigid folding motion inherent from units. On the other hand, both of them have contraction and shear deformation modes due to reconfigurability. Fig. 5. Typical configurations and motion modes of the 3×3×3 tessellation This work was published on the ASME Journal of Mechanisms and Robotics. The reconfigurable thick-panel origami structure proposed in this study can achieve fast switching of target configurations under a single actuator, which can not only be applied to scenarios with multifunctional requirements such as reconfigurable antennas and morphing wings, but also opens up ways to reduce the control complexity of reconfigurable systems through mechanical intelligence. The corresponding author of the paper is Prof. Yan Chen and Dr. Xiao Zhang of Tianjin University, the first author is Weiqi Liu, a PhD student at Tianjin University, and the second author is Yuxing Song, a master's student at Tianjin University.
Liu W, Song Y, Chen Y*, Zhang X*. Reconfigurable thick-panel structures based on a stacked origami tube. Journal of Mechanisms and Robotics, 2024, 16(12): 121005. |