|
New Publication: Reconfigurable Origami-inspired Multistable Metamorphous Structures
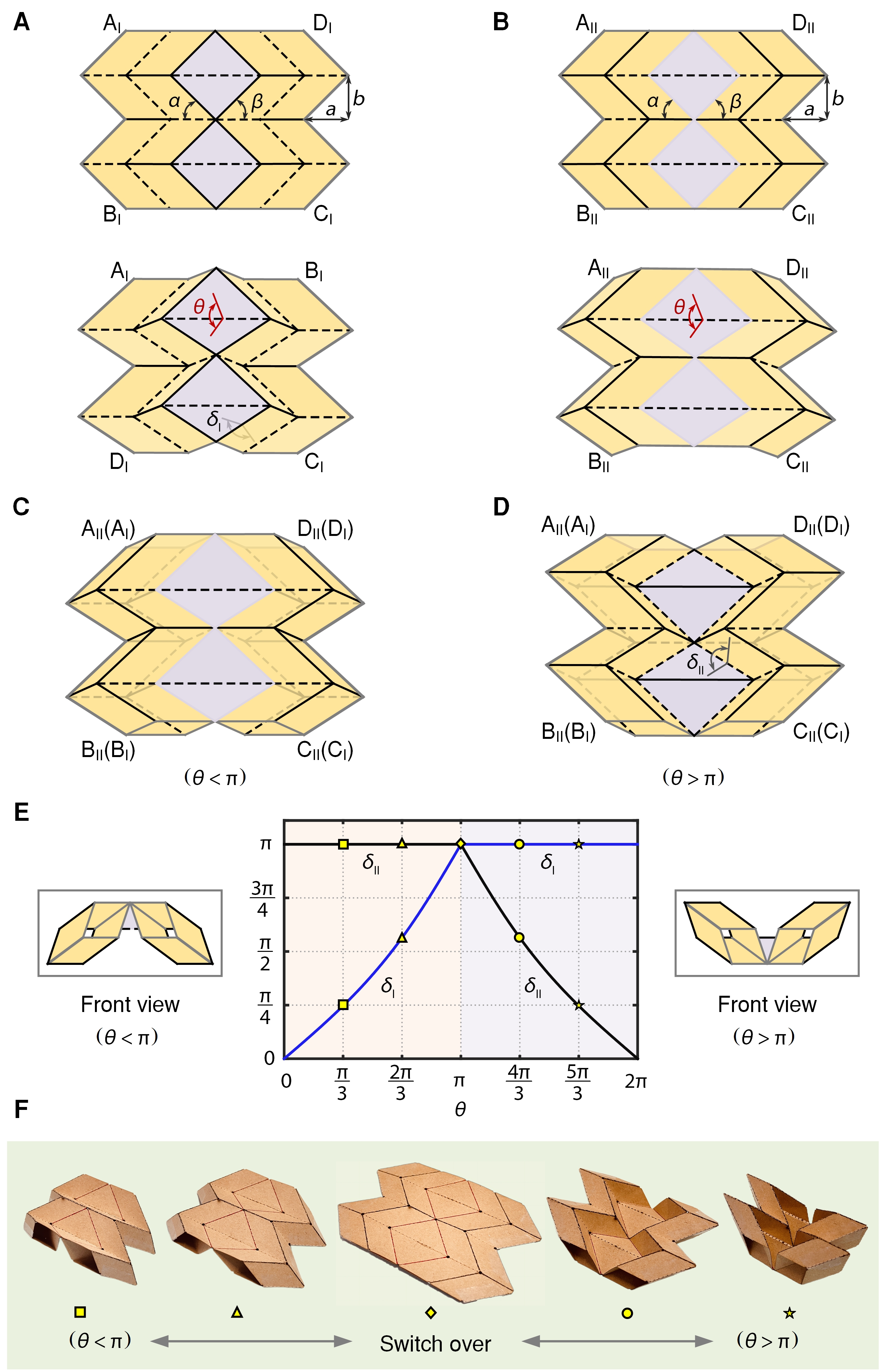
From: Date: 2024-05-30 Multistable metamorphous structures have significant advantages in achieving rapid configuration transformation and accompanied change of mechanical behaviours according to operational requirements. Multistable morphing structures, especially origami-inspired objects, have been extensively developed in fields such as robotics, mechanical metamaterials, and aerospace reconfigurable structures. At present, they are typically composed of non-rigid origami, where required facet deformation complicates actuation and makes them highly material dependent. In addition, once the design of a structure is determined, rarely can it acquire new configurations. There is a distinct lack of reconfigurability. The researchers started with four creases and six creases origami structures. Through introducing dormant creases and active creases, a new reconfigurable rigid origami structure was designed. The constitutive unit of the structure is composed of a pair of origami cells that are bonded together. Kinematically the unit is a single DOF flat-foldable rigid origami with a motion bifurcation. Cells can be switched over when the dormant creases along the edges of the central rhombuses are activated by turns. This transition only occurs at the fully deployable configuration. Next, the creases are assumed to behave like linear elastic torsional springs with a stiffness per unit length whereas the facets are rigid, and deformation modes of these linear elastic torsional springs are determined by the initial state and motion process of each origami cell. According to the total potential energy, the origami unit becomes a bi-stable structure whose stable states are related to but slightly different from the stable states of each cell. The researchers studied programming relationship between the angles at two stable states and initial rest states of the cells. Figure 1 A reconfigurable rigid origami structure Three sample units, SU1, SU2 and SU3, were constructed in this research. Cells were manufactured in their unstrained forms using a 0.6 mm thick elastomeric material, and 0.4 mm thick carbon fibre laminate sheet was bonded to each facet to maintain rigid origami and confine all deformation to the creases. To eliminate motion interference caused by the thickness of materials, the diagonal creases of the two central rhombuses were slit open. The results of the angles corresponding to two stable configurations and mechanical experiments validated the proposed design concept. Figure 2 Fabrication and experimental validation of the bi-stable units Since the origami unit is scalable and could be used as building blocks for robots, a multistable robotic limb owning a total of 8 configurations is reported in this research. It consists of three main components: the origami skeleton, a set of arc-shaped strips made from shape memory alloy that are mounted on the central vertex of each unit for reconfiguration, and a flexible air-tight skin over the entire structure and a pump used to deploy the skeleton in each configuration. The limb can lift a weight when it is in ⊖-⊕-⊕ configuration and act as a gripper, which can easily cope with objects of various shapes and weights, when it reconfigures from ⊖-⊕-⊖ to ⊕-⊕-⊕ configuration. Figure 3 Multistable robotic limb
Video 1 The multistable robotic limb grabs objects The bistable origami unit could also be extended laterally to create reconfigurable and programmable mechanical metamaterials to achieve desirable features. A representative sample metamaterial was built, whose pattern consists of 3 columns of units laterally and 7 columns in the longitudinal direction. This origami metamaterial has therefore a total of 128 stable states among which five symmetrical stable configurations are selected to show the programmability of Poisson’s ratio. Moreover, unsymmetrical origami units could also be included as building blocks to broaden design paradigm, such as a metamaterial with spiral profile. Figure 4 Reconfigurable and programmable origami metamaterials In summary, this work provides an origami-based building block for multistable metamorphous structures that can be reconfigurable from one set of motions to a completely different set without facet deformations. This research offers a new design paradigm for the reconfigurable shape morphing structures and metamaterial architecture that can potentially be used to realise multifunctional robotic systems, bioinspired morphing mechanisms and advanced metamaterials.
Wang C, Guo H*, Liu R, Deng Z, Chen Y, You Z*. Reconfigurable Origami-inspired Multistable Metamorphous Structures. Science Advances. 2024, 10(22), eadk8662. |