|
New Publication: Advanced Functional Materials | Xiaochen Yang published Threefold Möbius Machine
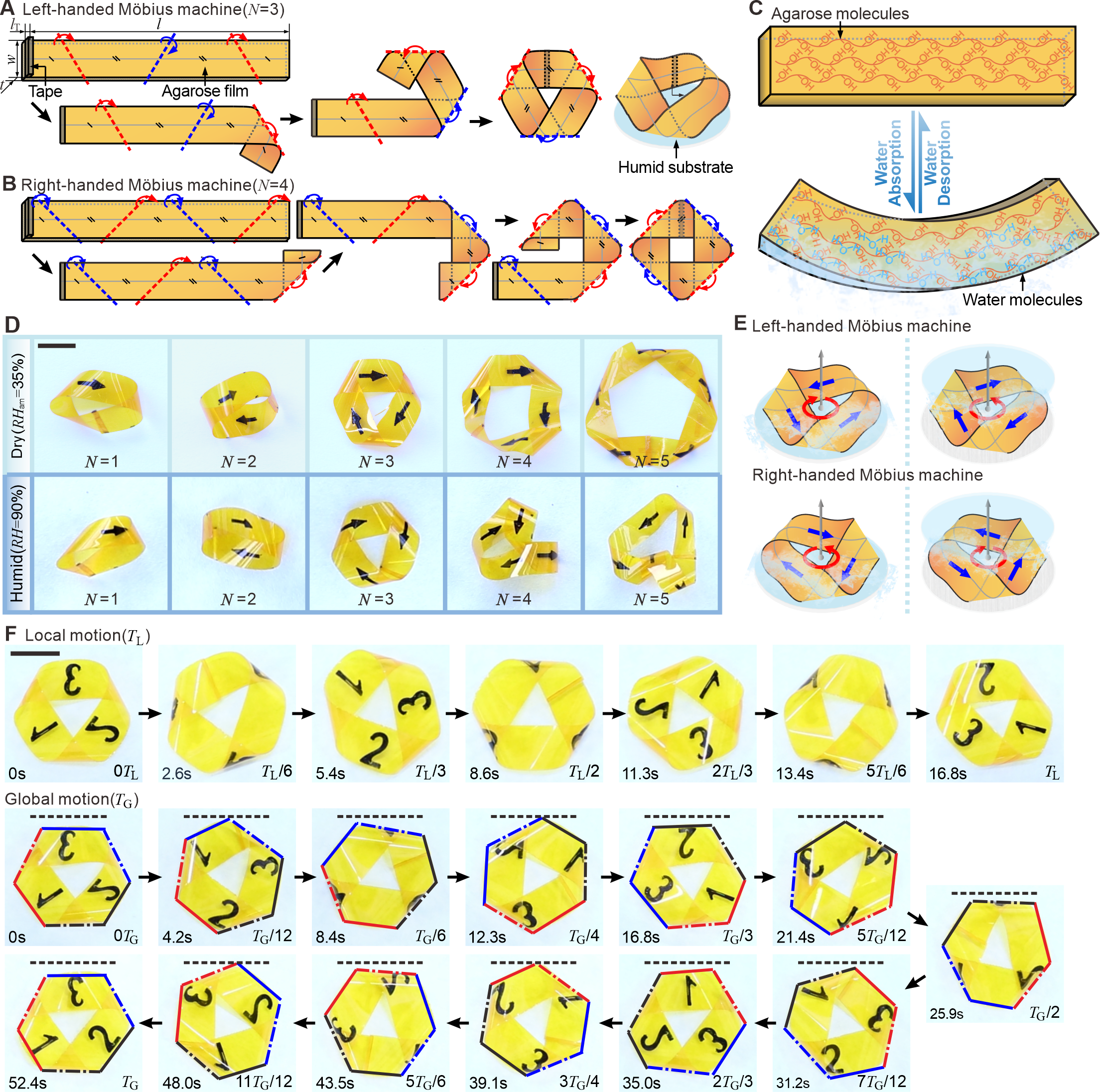
From: Date: 2025-02-18 Soft-matter machines fabricated from stimuli-responsive materials can achieve diverse controllable deformations under external stimuli such as light, temperature, electricity, and magnetic fields. However, continuous shape changes and movements of these machines often depend on precise control of external stimuli, which significantly restricts their potential applications in intelligent systems and human–machine interactions. To achieve self-sustainable motion under constant external stimuli, it is essential to overcome the challenges of geometric design, physical modeling, and mechanical -guided parametric study. Recently, the research team of Professor Yan Chen from School of Mechanical Engineering at Tianjin University, in cooperation with Professor Lei Zhang from School of Chemical Engineering at Tianjin University and Professor Jiu'an Lv from School of Engineering at West Lake University proposed a threefold Möbius machines based on topological structure of the Möbius strip, which can continuously operate in a constant environment. A theoretical model is built based on moisture diffusion and developable surfaces to unveil the mechanisms of curvature-driven rotary motion with shape conservation, and to establish the quantitative correlations between the motion speed and the geometric and environmental parameters to optimize the design under given constraints. Experiments have demonstrated that the machine can achieve autonomous periodic motion for over 252 hours, continuously output mechanical work, and dynamically sense environmental humidity. The research was published online on February 9, 2025, in Advanced Functional Materials. The co-corresponding authors of this paper are Professor Yan Chen and Professor Lei Zhang from Tianjin University. The co-first authors are Ph.D. student Xiaochen Yang from Tianjin University, and Associate Professor Zhao Wei Qiang from Nankai University and Professor Jiayao Ma from Tianjin University. The study was supported by the National Natural Science Foundation of China and New Cornerstone Science Foundation through the XPLORER PRIZE. Researchers have constructed the Möbius machines made from AG(agarose) films, which can rapidly bend and unbend with water absorption and desorption, respectively. A threefold Möbius actuator is fabricated by twisting a rectangular strip of Agarose (AG) film back and forth for 3 times, and then joining two ends with the tape, leading to a structure with threefold rotational symmetry, and placing it within a constant humidity gradient (Video 1). It can exhibits two types of periodic motions: ignoring the relative motion between the machine and the substrate, the material can flow along the length of the strip through bending and unbending to adapt to the varying curvature of the Möbius machine at different positions, which is similar to the motion of a conveyor belt. Hence, we call it “local motion”. Meanwhile, if taking the Möbius machine as a whole in a hexagonal profile, it rotates clockwise about its central axis perpendicular to the substrate, which is thus referred to as “global motion” in Figure 1 and Video 2. Figure 1. The Möbius machines made from humidity-sensitive AG films.
Movie 1. Manufacturing process of the Möbius machines.
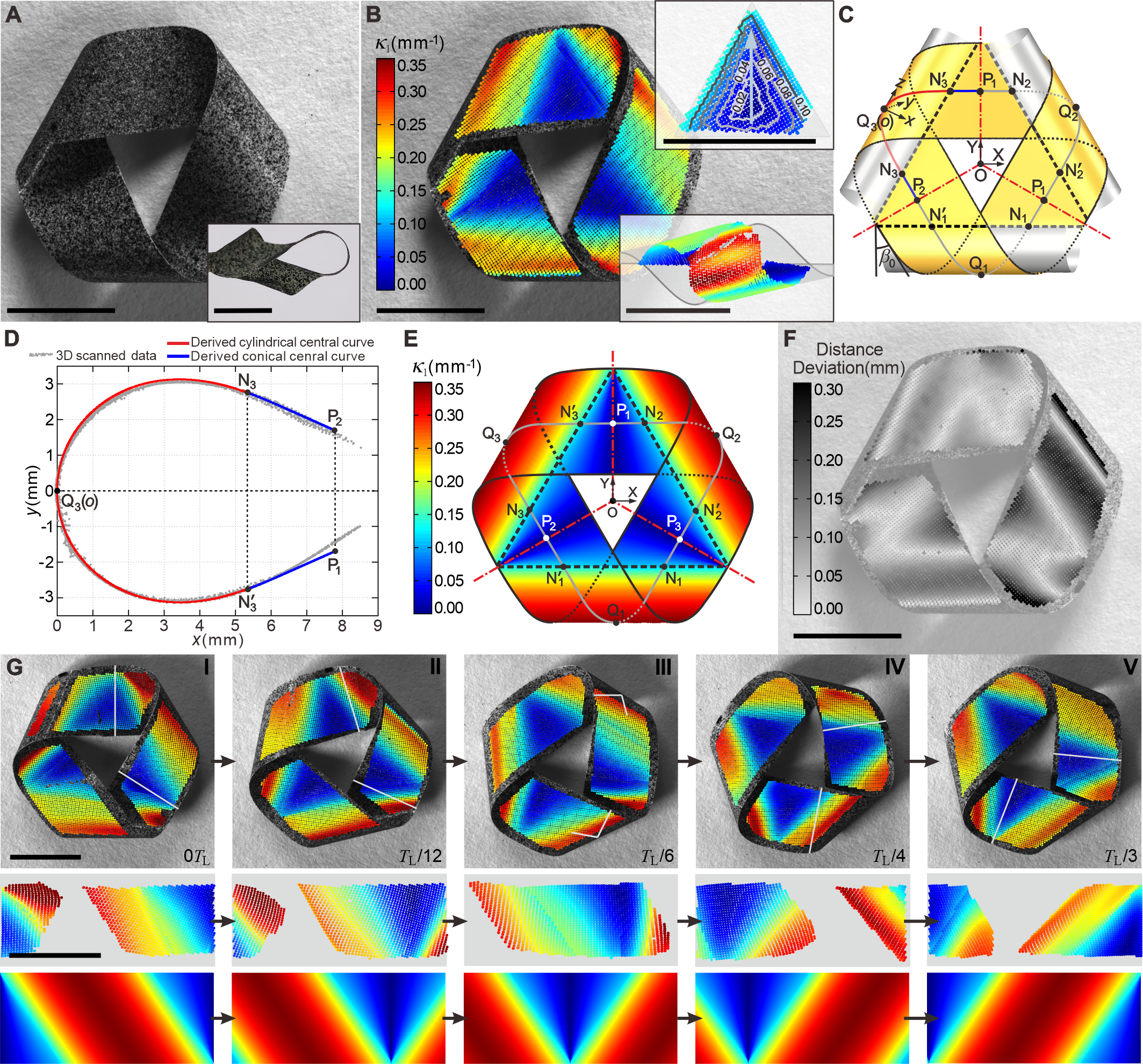
Movie 2. Local and global motions of theMöbius machine. Subsequently, researchers applied scanning technology to reconstruct the geometric shape of the machine in its standstill state. Based on the principal curvature distribution and inextensible developable surfaces, the closed-loop structure can be simplified as three identical cylindrical surfaces winding around a silver generalized cylinder, interconnected by three nearly flat trapezoidal conical surfaces. Furthermore, quadratic curves were applied here to fit the cylindrical surfaces, and specific curves were employed to fit the conical surfaces, thereby obtaining the entire geometric configuration, which matched our scanning results. Additionally, comparing the geometry of the machine in both dynamic and static states, it indicates that the overall shape and curvature distribution nearly remain unchanged during motion, forming zero-elastic energy modes (ZEEMs), which laid the foundation for the machine's autonomous motion,as show in Figure 2. Figure 2. Geometrical modeling of the Möbius machine. Utilizing the aforementioned geometric model, researchers employed an energy analysis method to investigate the conversion relationships between chemical energy and mechanical energy (including strain energy, kinetic energy, and gravitational potential energy) during motion. Given that the machine maintains its shape, During local motion, all the material particles must move along the length direction of the strip at a constant speed, vL, otherwise the strip would be stretched or wrinkled. Moreover, based on the zero-elastic energy modes (ZEEMs) hypothesis, the Möbius machine conserves the humidity energy absorbed and released during self-sustained motion. By coupling moisture diffusion with definition of developable surface, The curvature-driven locomotion mechanism has been mathematically revealed here, which elucidates the underlying mechanism of local motion. For global motion, the mechanism was revealed by analyzing the rolling friction force. Driven by local motion, contact points between the machine and the substance generated rolling friction forces. The tangential components of the friction forces provided torque to accelerate the machine until it reached a steady global rotation. Furthermore, the mechanical model was applied to derive the relationship between design parameters and motion rates, aiding in the optimization of machine designs for various applications. This theoretical model clarifies the quantitative relationship between these parameters and provides a scientific basis for optimizing the Möbius machine for diverse scenarios (Figure 3). Figure 3. Theoretical modeling of the machine motions. To verify the accuracy and reliability of the theoretical model, researchers tested Möbius machines with different geometric parameters under various humidity conditions (Figure 4). The optimal self-rotation speed of the machine reached 25.95 r/min, which is significantly higher than the maximum rotational speed of existing soft machines driven by constant stimuli.
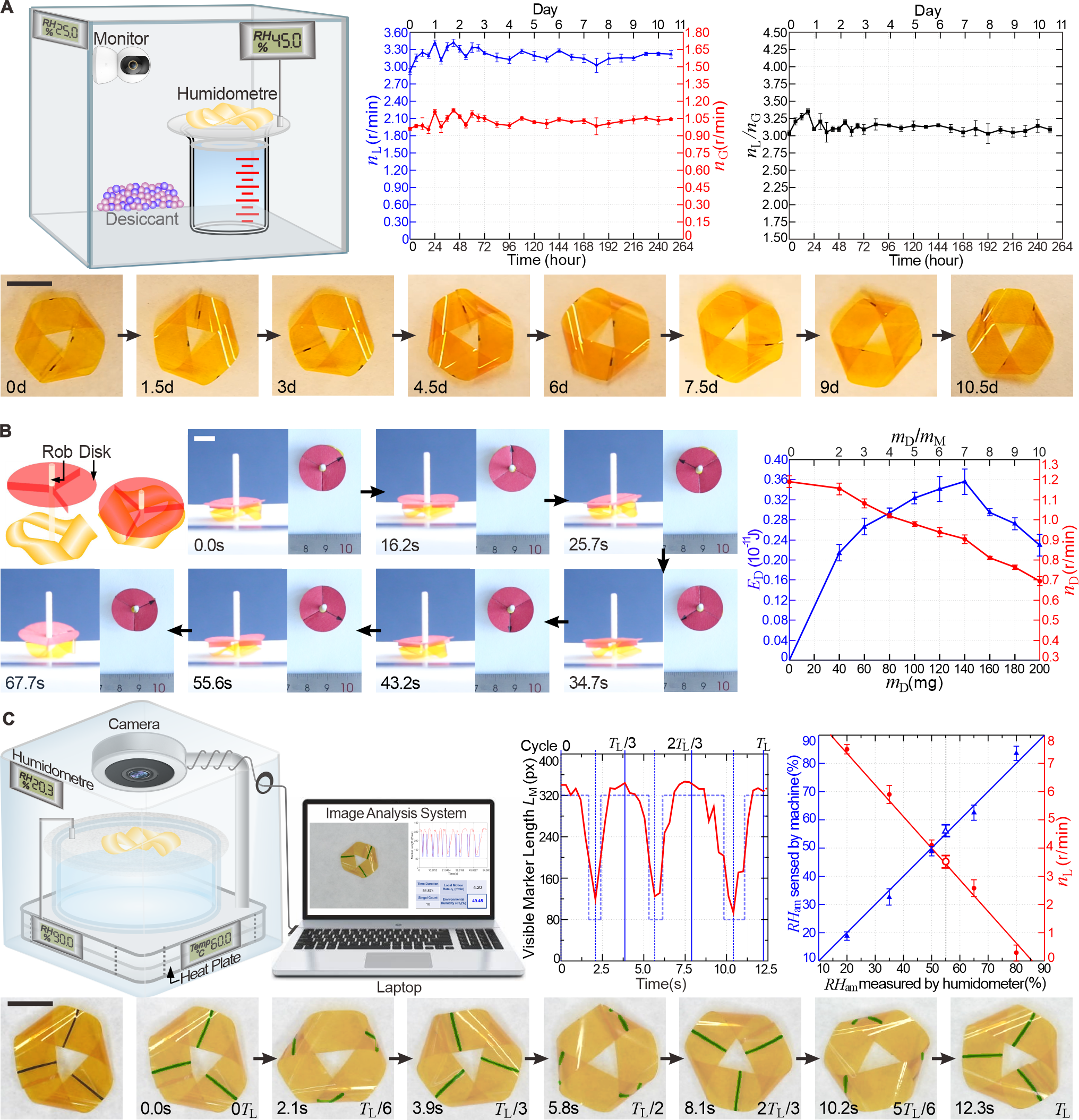
Figure 4. Parametric analysis of the machine motions. The Möbius machine, with its unique structure and performance, has demonstrated significant multifunctionality and efficiency across various applications (Figure 5). In long-term operation tests, the machine worked continuously for 252 hours (10.5 days) under constant humidity conditions, completing over 47,500 local motion cycles, which fully proves its remarkable stability and self-sustaining capability (Video 3). In mechanical power output tests, the Möbius machine drove paper disks of different weights to rotate through its orbital motion and continuously output mechanical work, showing good adaptability and reliability in mechanical power output(Video 4). Additionally, the Möbius machine also functions as an environmental humidity sensor. With the aid of machine vision technology, it can accurately measure relative humidity within 2 minutes, with an error margin of less than 5.37% compared to standard hygrometers, achieving dual functions of actuation and sensing(Video 5).
Figure 5 Demonstrations of the Möbius machine.
Movie 3. Demonstration of long-term motion.
Movie 4. Demonstration of mechanical work output.
Movie 5. Demonstration of ambient humidity. In closing, this study proposed a threefold Möbius machine fabricated from humidity-responsive materials, which can achieve a stable periodic motion driven by humidity. The curvature-driven locomotion mechanism has been mathematically revealed here by coupling moisture diffusion with definition of developable surface. Thereby, the correlation among the structural design, material deformation, and periodic motions of the machine enables a parametric design based on specific requirements. Beyond this Möbius machine, we anticipate that our theoretical model will bring profound understanding to design novel soft machines with distinctive topologies to achieve enduring self-regulated locomotion driven by constant stimuli for forefront applications in advanced robotic systems.
Yang X#, Zhao W#, Ma J#, Fu L, Liu M, Xu C, Hu Z, Lv J, Chen Y*, Zhang L*, Threefold Möbius Machine. Advanced Functional Materials, 2025, 202420815. |