|
New Publication: Advanced Science | Chuhan Xu published An Ultra-Fast Rolling Double-Helical Robot Driven by Constant Humidity
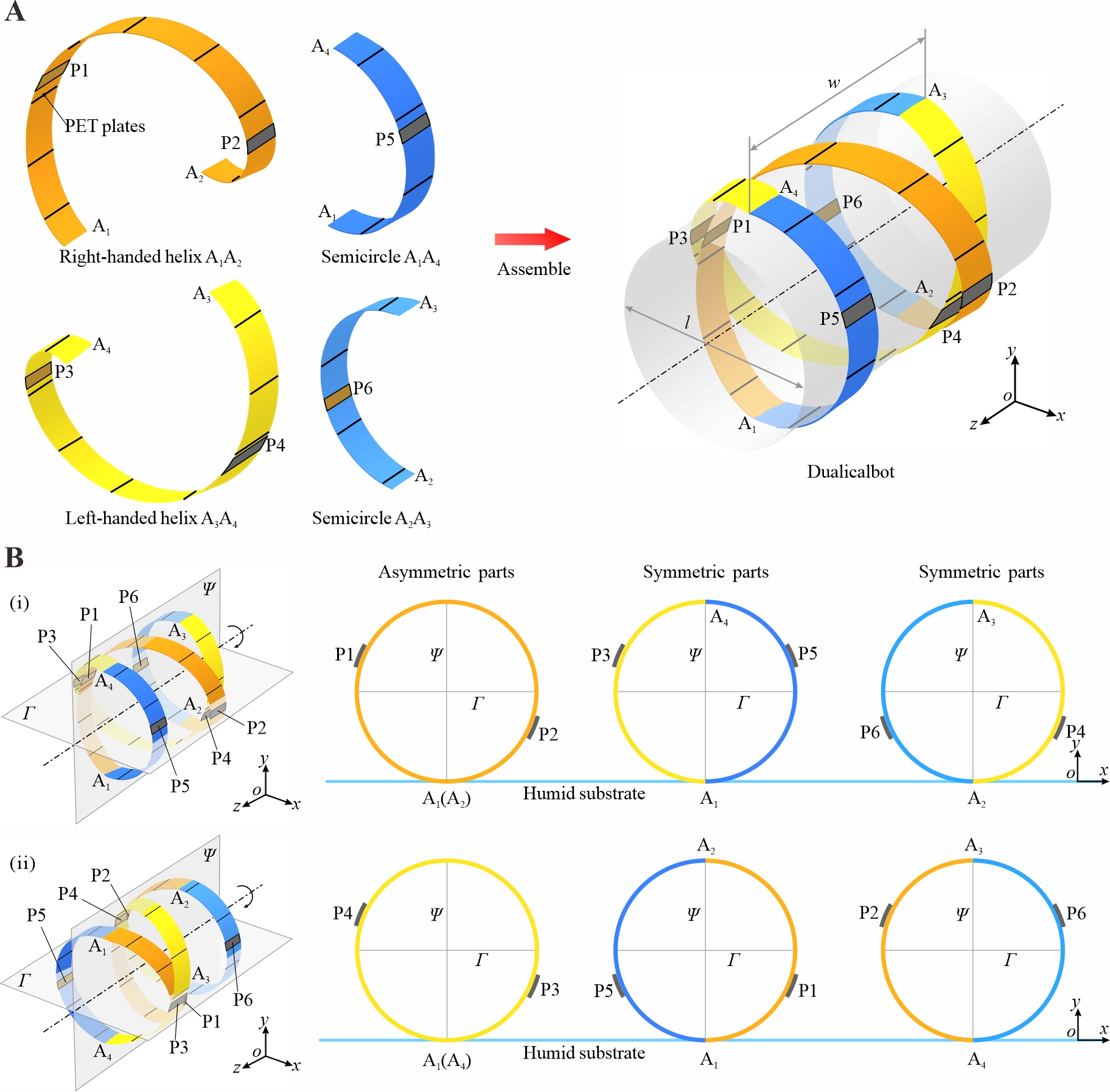
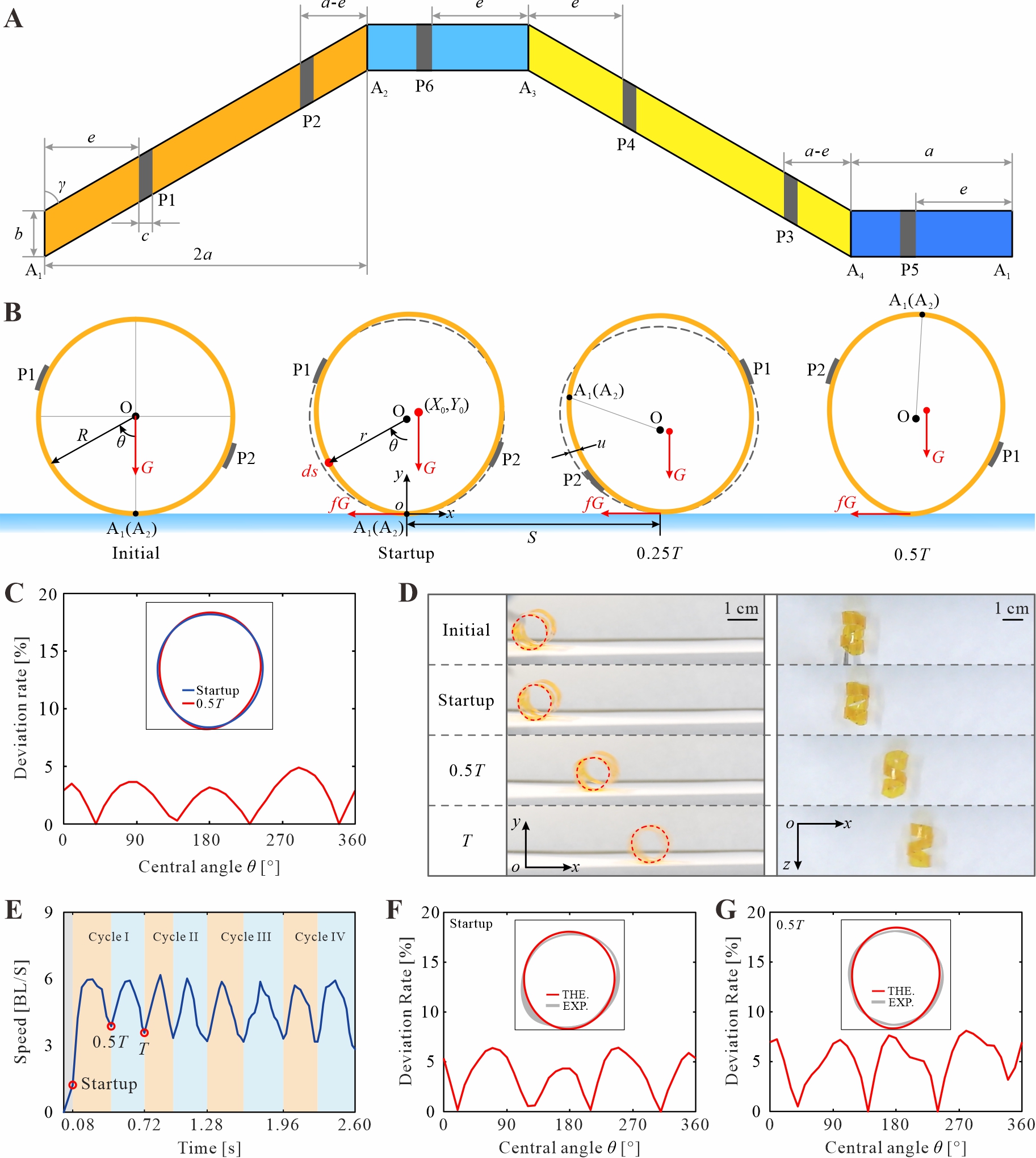
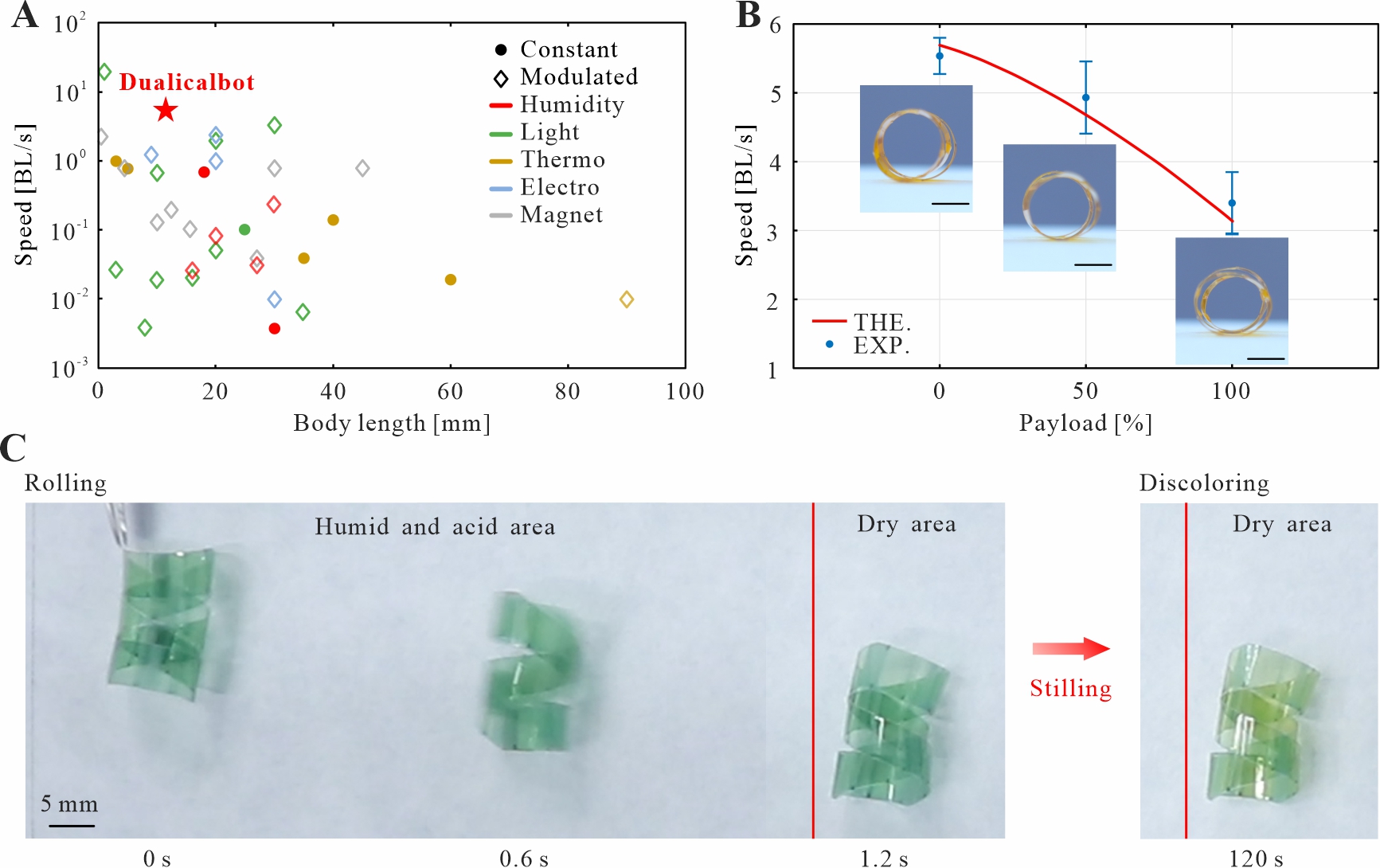
From: Date: 2025-04-03 Overview Stimuli-responsive materials, which are capable of undergoing large deformation or generating driving forces in response to external stimuli have shown great potential in the development of soft robots and artificial muscles. However, most soft robots of this type rely on modulated external stimuli including electric fields, magnetic fields, or light to achieve continuous motion, which limits their autonomy and adaptability in unstructured environments. In contrast, soft robots driven by a constant environment do not require the modulation of stimuli, but their speeds are relatively slow. Highlight The Dualicalbot is assembled by connecting a left-handed helix, a right-handed helix and two semicircle arcs end to end (Figure 1A). Compared with the existing single-helical robots driven by constant stimuli, which typically contain three stages in each cycle, that is shape deformation to generate the required driving moment, rolling motion, and shape recovery for the next cycle, the double-helical structure does not require the shape recovery stage as one helix has enough time to recover to its original shape while the other one drives the robot, thus leading to faster motion speed. Figure 1. Structural design of the Dualicalbot. Then energy conservation equation was developed to analyze the transformation between chemical energy (from water absorption) and mechanical energy (including the bending strain energy, the kinetic energy, the gravitational potential energy, and the energy dissipated by friction). Moreover, the relation between the local deformation and the rolling motion of the robot was established by means of Newton-Euler recursive push mechanics algorithm. Theoretical results revealed that the configuration of the robot remains nearly identical at the beginning and end of each half-cycle (with a maximum deviation rate under 8%), and the rolling speed followed the same periodic variation. These findings confirm the repeatability and stability of the locomotion of the Dualicalbot (Figure 2). Figure 2. Theoretical modeling and experimental validation of the Dualicalbot.
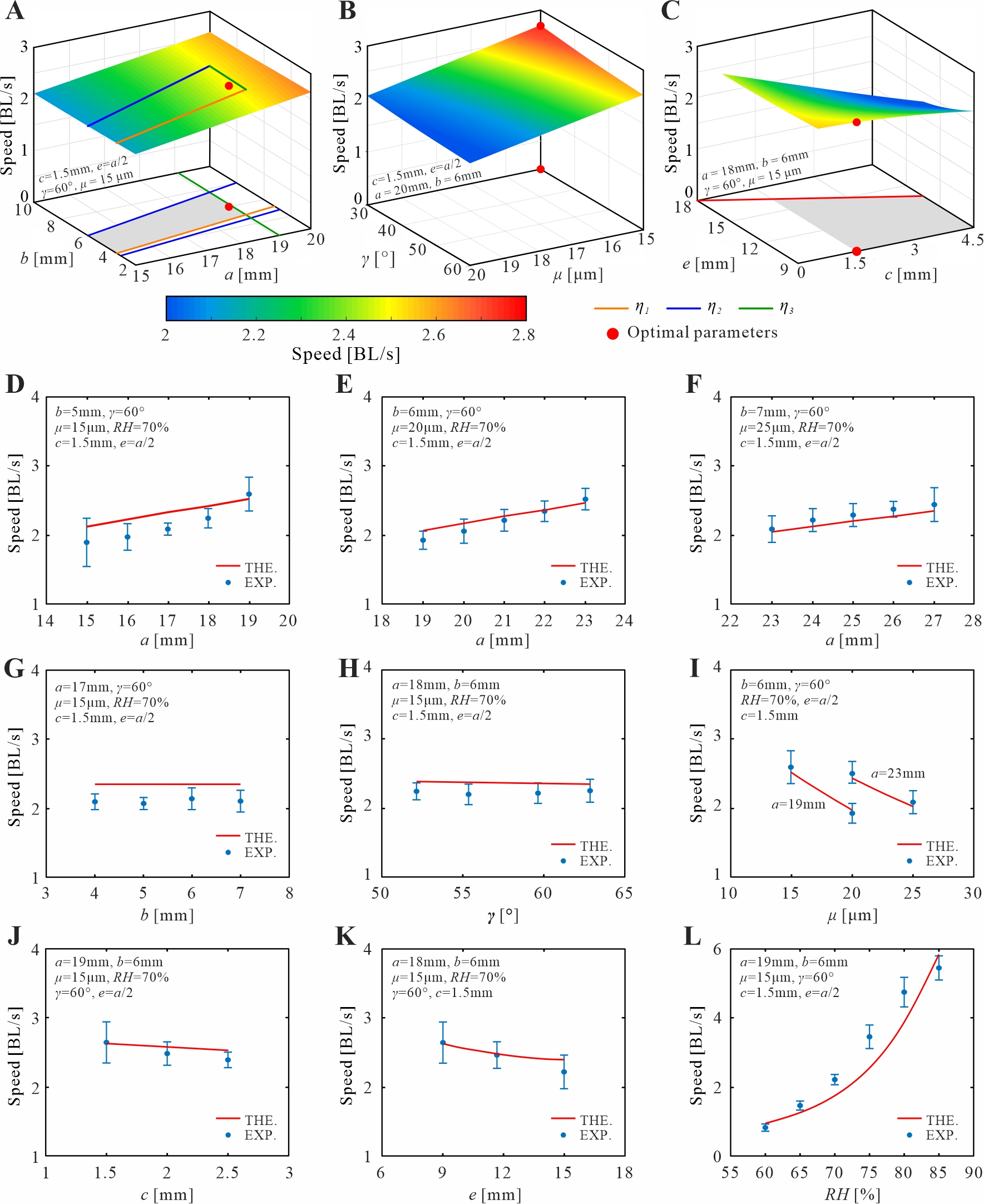
Movie1 Rolling demonstration of the Dualicalbot. To validate the theoretical predictions, experiments were conducted on the Dualicalbot with varying geometric parameters and relative humidity conditions. Generally, the experimental results match reasonably well with the theoretical predictions, and the feasible regions of each parameter and the optimal geometric and environmental parameters are determined (Figure 3). Figure 3 Parametric analysis of the Dualicalbot.
Movie2 Rolling demonstration of the Dualicalbot with optimal geometric parameters. Based on these optimal parameters, the robot, which weighed only 29.5 mg, achieved a maximum rolling speed of 5.8 BL/s, 4.8 times faster than existing soft robots operating under constant environmental stimuli. Furthermore, it maintained stable rolling under a load equivalent to 101.69% of its self-weight with a speed of 3.4 BL/s. Additionally, researchers developed a robot capable of detecting an acid environment. This was achieved by incorporating a sensitive acid-base indicator into the AG film so that the robot would discolor when it passes through an acid substrate (Figure 4).
Figure 4. Performance demonstrations of the Dualicalbot.
Movie3 Demonstrations of the Dualicalbot with different payload.
Movie4 Demonstration of the acid environment detection robot. Conclusion To summarize, this research integrates a double-helical structure with the humidity responsive agarose film to develop an untethered soft robot named Dualicalbot that is capable of an ultra-fast rolling locomotion under a constant humidity. According to theoretical modeling and experimental validation, the optimal geometric and environmental driving parameters are obtained, and then the fastest rolling speed of the robot is determined. The framework of structural design and theoretical modelling presented in this research will provide useful guidance for the design of soft robots based on stimuli-responsive materials. Future research will focus on developing new soft robots with superior motion capability and expanding their functions serving various engineering applications.
Chuhan Xu#, Jiayao Ma#, Lei Fu, Xinmeng Liu, Lei Zhang*, Yan Chen *. An Ultra-Fast Rolling Double-Helical Robot Driven by Constant Humidity. Advanced Science, 2025, 2500577. |