|
New Publication: Chinese Journal of Mechanical Engineering | Dr. Tianshu Wang published Shape-Reconfigurable Deployable Paraboloid Reflector Based on a 7R-8R Truss Network
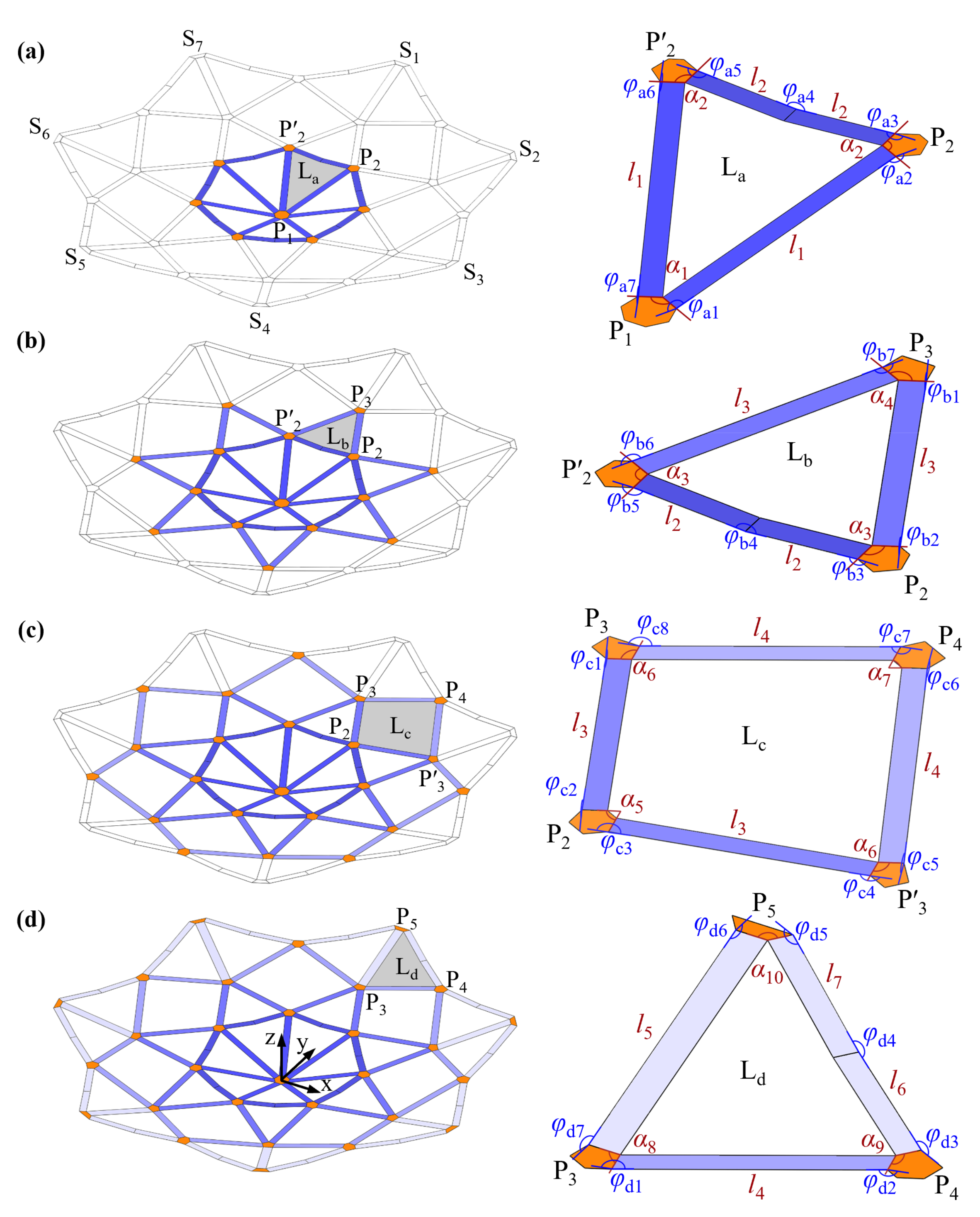
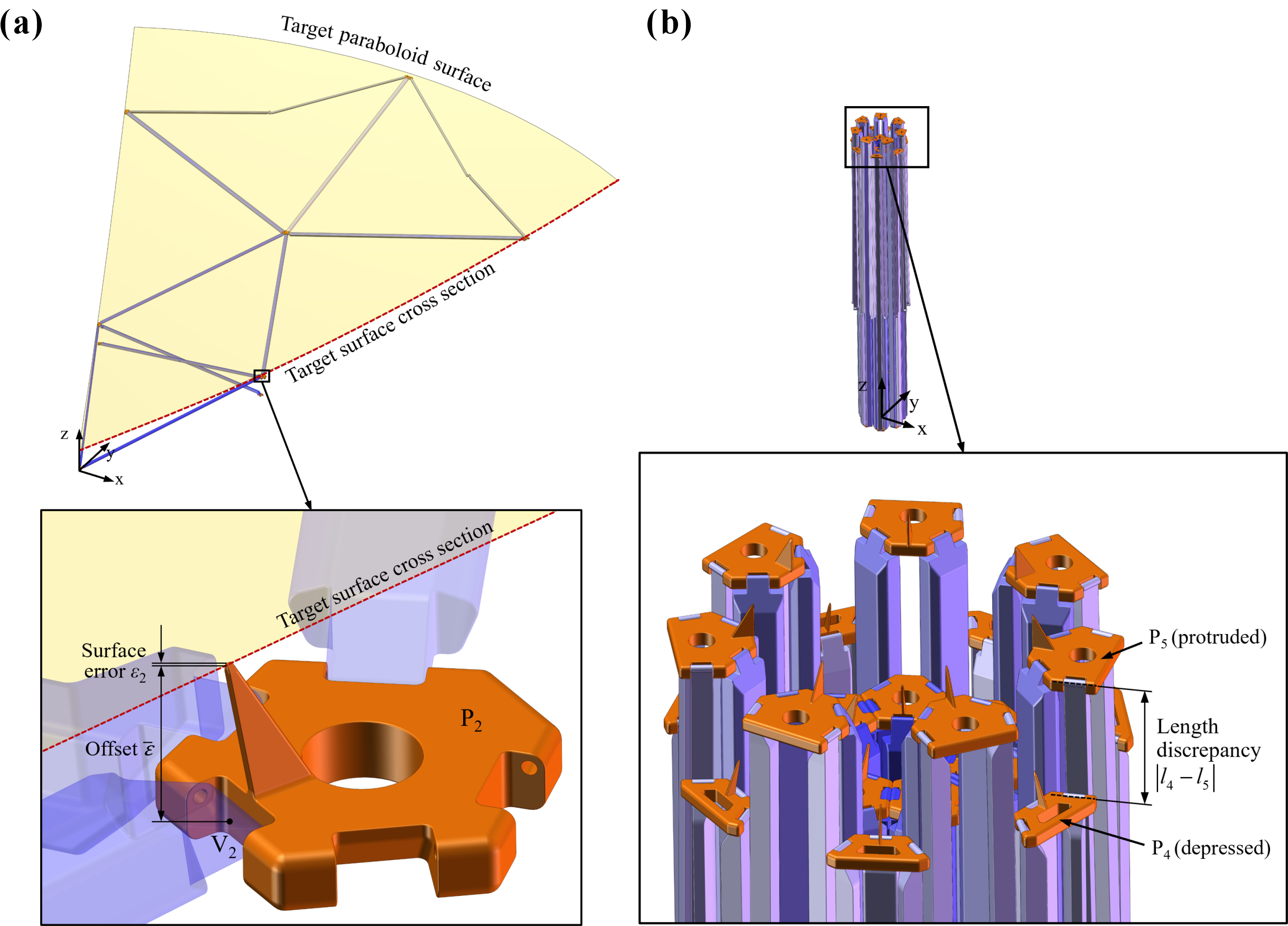
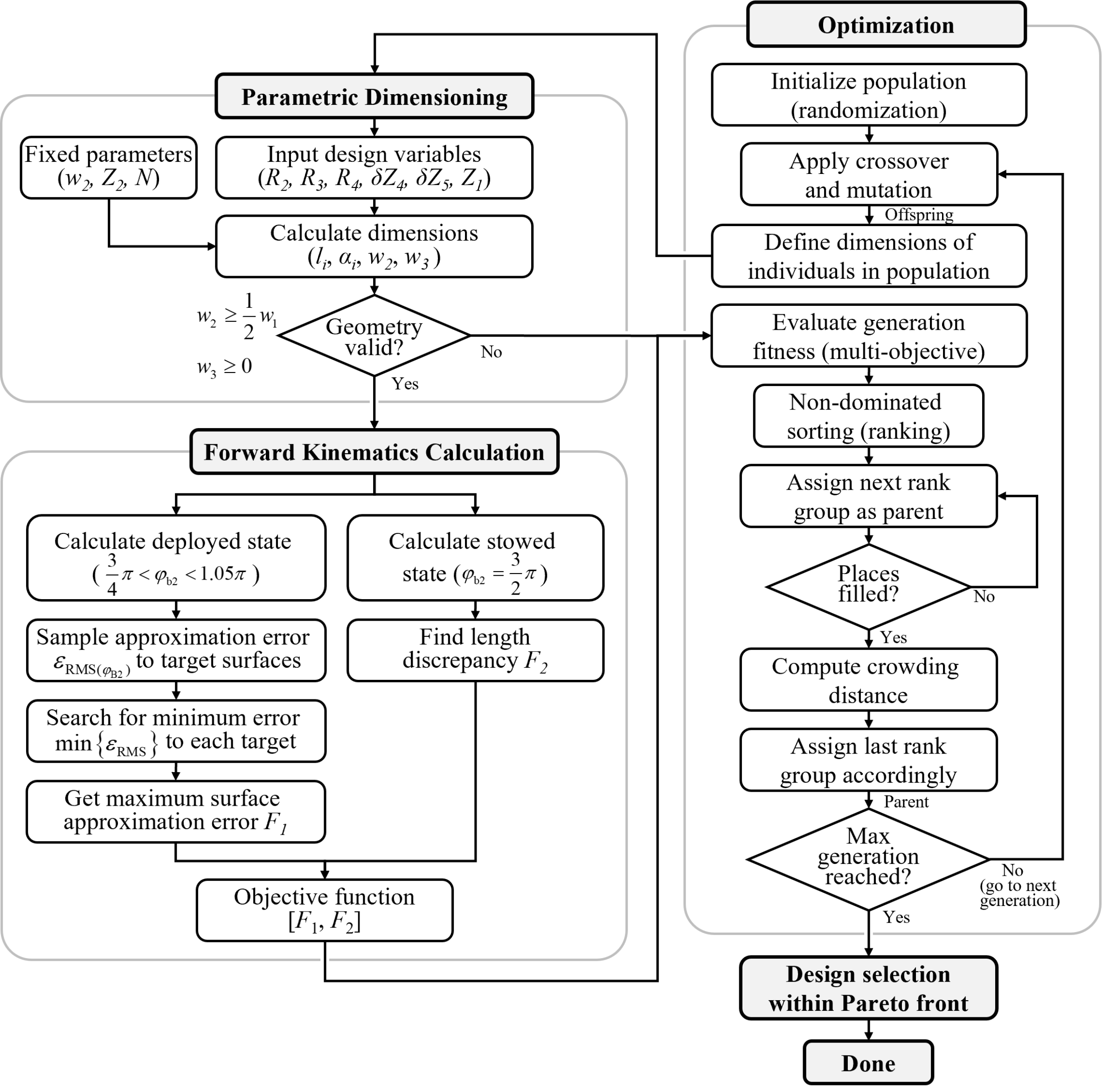
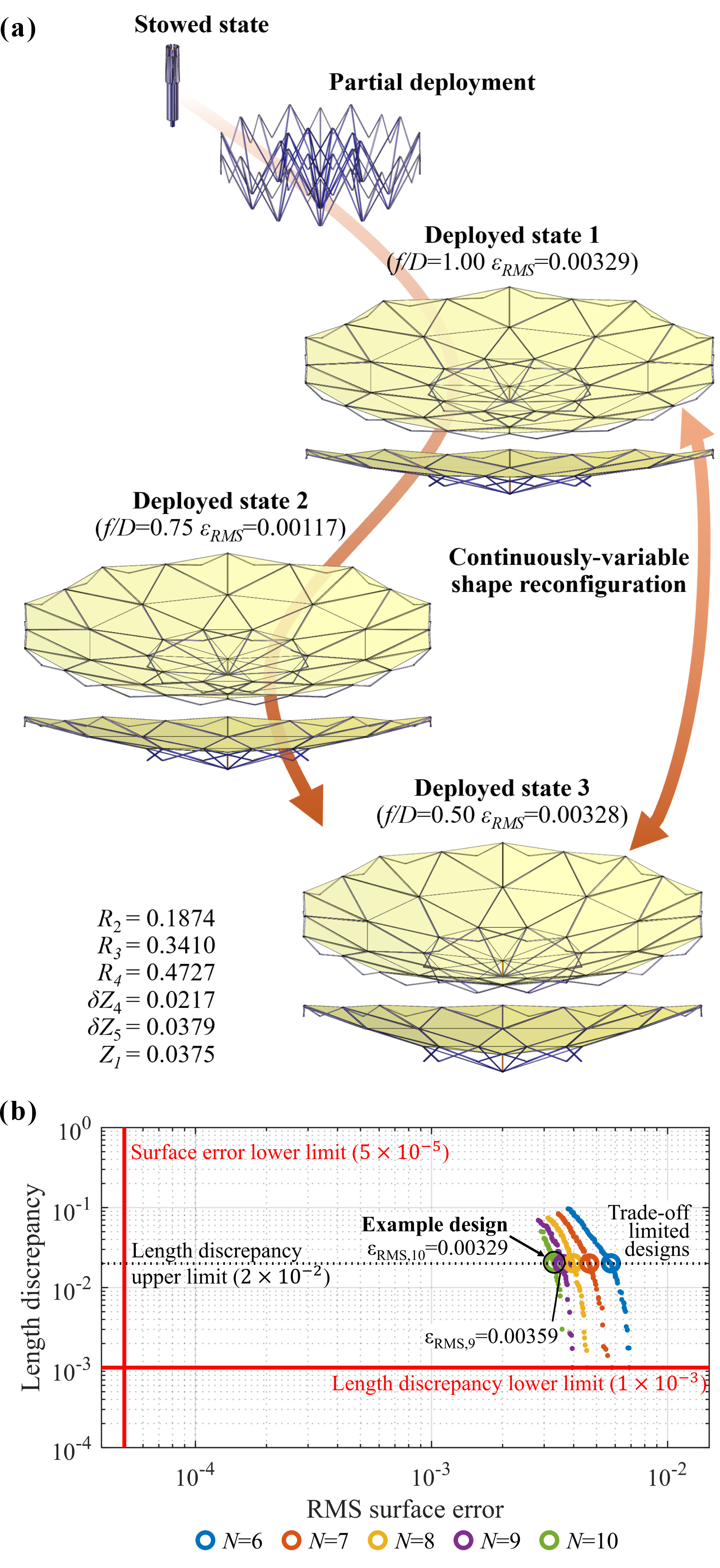
From: Date: 2025-07-22 Overview Truss-supported deployable antennas use rigid-foldable trusses to support flexible mesh reflecting surfaces, offering advantages such as low mass and large deployment ratios, and are widely employed in aerospace as satellite radar and communication antennas. Meanwhile, antenna reconfiguration employs electronic control or mechanical deformation to modulate antenna characteristics including beam direction, and has also been applied to satellite communications. Shape reconfiguration of truss-supported deployable antennas could greatly extend their functionality, yet current research has not realized the reconfiguration of doubly-curved surfaces such as paraboloids. Therefore, configuration and dimensional design methods for truss-supported deployable antennas are needed to enable the deployment and shape reconfiguration of parabolic antennas. Recently, Professor Yan Chen’s team at Tianjin University’s School of Mechanical Engineering studied spatial linkage assemblies and designed a single degree of freedom (DOF) deployable linkage assembly configuration for antenna supporting trusses based on 7R and 8R spatial linkage units. Using the non-dominated sorting genetic algorithm (NSGA-II), they realized dimensional inverse design by optimizing the antenna’s surface-fitting accuracy for multiple target surfaces, as well as its folded shape. Resulting parabolic antenna designs can unfold and then morph along the same single-DOF motion path, achieving both deployment and shape reconfiguration. The design of the shape reconfigurable parabolic deployable antenna centers on its rigid-foldable supporting truss. By engineering single-DOF coordinated motion of a 7R–8R spatial linkage assembly, the structure can unfold from the folded state into a target surface and then reach additional target surfaces through further motion, thereby achieving shape reconfiguration. The rigid-foldable supporting truss is composed of 7R and 8R spatial linkage units (Fig. 1). Starting from the center of the assembly, the first-layer of the assembly is formed by arranging several rotationally symmetric 7R units and is single-DOF. By sharing common hinges, single-DOF motion is propagated to the second layer of 7R units. The third layer adopts 8R units following overconstraint reduction design, and inherits single-DOF motion from the second layer via shared hinges. Fourth-layer 7R units again share hinges to obtain constraints. An extensible-layer spatial linkage assembly that maintains single-DOF motion throughout can be obtained through this construction strategy. Fig. 1 Construction strategy for the linkage assembly. (a-d) 7R and 8R units in layers 1 to 4. The design objectives for the morphing-reconfigurable parabolic deployable antenna are twofold: Surface fitting accuracy of the reflector with respect to multiple target surfaces, and the compactness of its folded state. As shown in Fig. 2a, the surface-fitting accuracy is quantified by the maximum vertical distance between the target paraboloid and key nodes which correspond to fixture points supporting the reflective mesh. As depicted in Fig. 2b, folding compactness is captured by link length differences at the upper and lower sides of the folded truss, where a smaller difference corresponds to more compact folding. By taking the worst-case (maximum) best-fit error across all target surfaces as one metric and the link length difference as the second, we formulate a multi-objective optimization problem. Using the NSGA-II algorithm in conjunction with closed-form kinematic solutions for the 7R-8R spatial linkage assembly, we rapidly generate the design objective Pareto front for (multiple) prescribed target surfaces. This workflow is illustrated in Fig. 3. Fig. 2 Key design objectives. (a) Surface fitting accuracy. (b) Folded-state link length difference. Fig. 3 Linkage assembly dimensional inverse design workflow based on multi-objective optimization. This paper presents sample designs for one, two, and three target surfaces. The three-surface case is illustrated in Fig. 4. The Pareto fronts of design objectives for linkage assemblies with six to ten sides are presented in Fig. 4b. The design incorporates target surfaces with focal ratios of 1.00, 0.75, and 0.50, and allows reversible shape configuration between the three. Further analysis reveals that the achievable fitting accuracy for paraboloids within this focal-ratio range is governed solely by the surfaces with the largest and smallest focal ratios, thereby enabling continuous shape reconfiguration of the parabolic antenna within the focal-ratio range. Fig. 4 Parabolic reflector design with three target surfaces. (a) Reflector deployment and shape configuration process. (b) Pareto front of design objectives (surface fitting accuracy and link length difference). This study was published online in the Chinese Journal of Mechanical Engineering on 18 July 2025. The corresponding author is Professor Yan Chen of Tianjin University. The co-first authors are post-doctoral researchers Tianshu Wang and Yuanqing Gu, also of Tianjin University. The work constructed a single-DOF, rigid-foldable antenna supporting truss using a 7R–8R spatial linkage assembly, then performed dimensional inverse design using multi-objective optimization to simultaneously fit multiple target paraboloid surfaces and achieve a compact folded state. The work enriches the design methodology for shape reconfigurable antennas, and the proposed shape reconfigurable parabolic deployable antenna marks the first shape reconfiguration of a paraboloid, showing engineering potential for satellite reflector antennas and related applications.
Tianshu Wang, Yuanqing Gu, Yan Chen*. Shape-Reconfigurable Deployable Paraboloid Reflector Based on a 7R-8R Truss Network. Chinese Journal of Mechanical Engineering. 2025, 38: 124. |