|
New Publication: Research | Kaili Xi published Design and Visualization of a Hierarchical Metamaterial with Tunable Stiffness
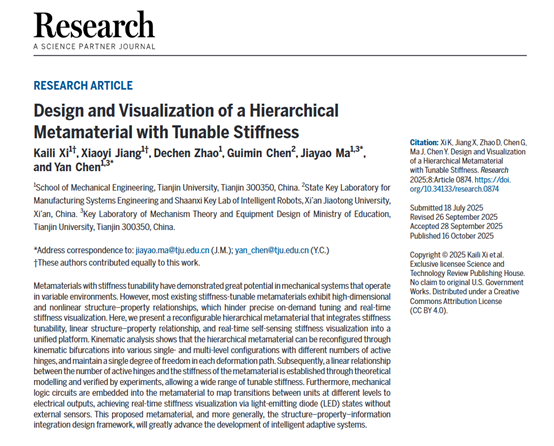
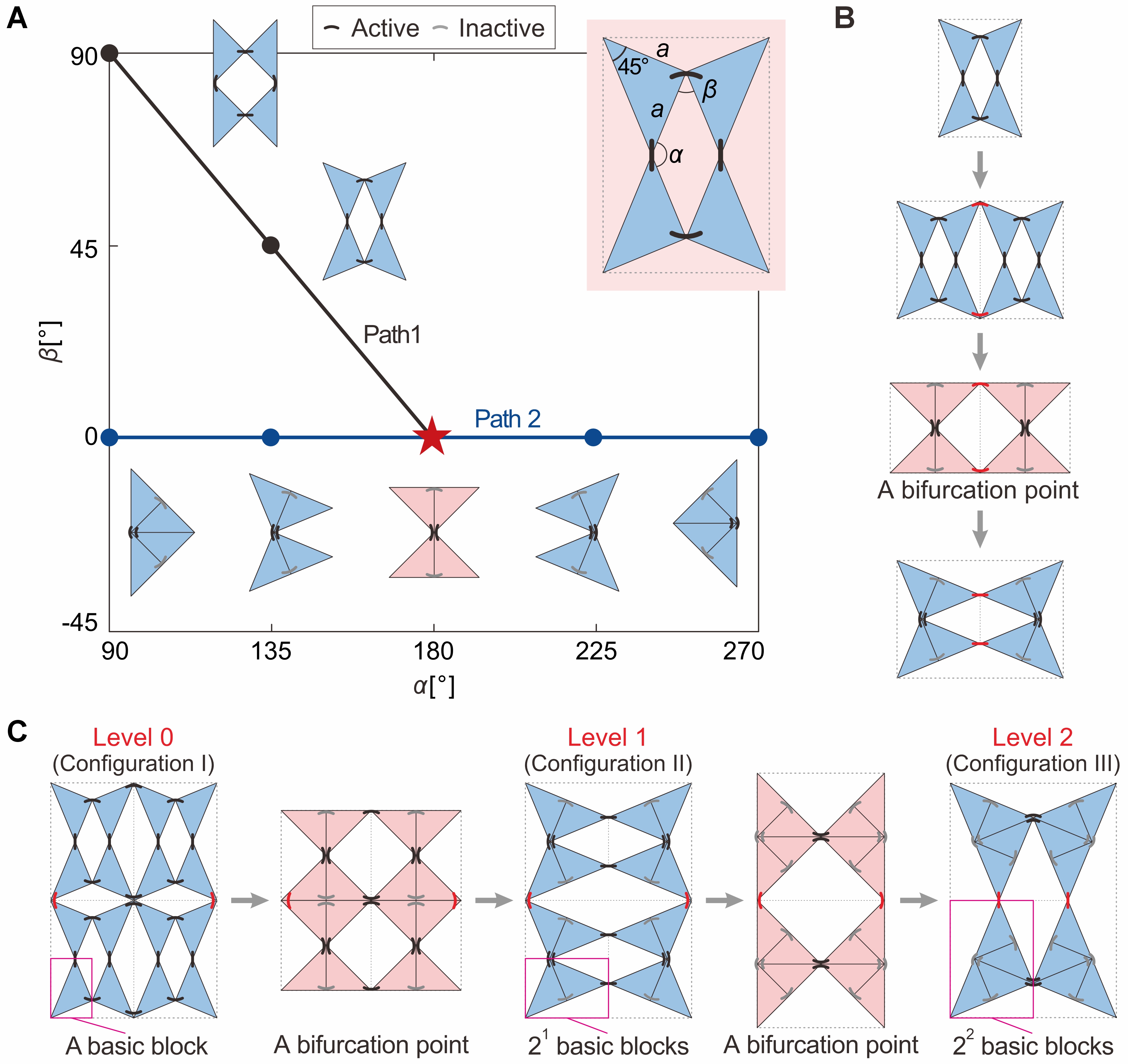
From: Date: 2025-10-21 Metamaterials with stiffness tunability have demonstrated great potential in mechanical systems that operate in variable environments. Real-time stiffness visualization, which translates the stiffness information into digital outputs, allows users to know the exact stiffness after tuning without the need for external sensors, and thus holds great application potential in human-robot interaction and adaptive robotic systems. However, most existing stiffness-tunable metamaterials exhibit high-dimensional and nonlinear structure-property relationships, which hinder precise on-demand tuning and real-time stiffness visualization. To this end, a research team of Professor Yan Chen from the School of Mechanical Engineering at Tianjin University proposed a reconfigurable hierarchical metamaterial. By establishing a linear relationship between the stiffness of the metamaterial and the number of active hinges, the team achieved a linearized structure-property relationship. Furthermore, mechanical logic circuits were embedded into the metamaterial to map different hierarchical configurations to LED-visualized stiffness values, realizing the integration of structure, property, and information. The research, titled “Design and Visualization of a Hierarchical Metamaterial with Tunable Stiffness," was published online in Research on October 16, 2025. The co-corresponding authors are Professors Yan Chen and Jiayao Ma, and the co-first authors are Ph.D. student Kaili Xi and M.S. student Xiaoyi Jiang. M.S. student Dechen Zhao provided experimental support, and Prof. Guimin Chen from Xi'an Jiaotong University provided guidance. The research was supported by the National Natural Science Foundation of China. 研究内容 The metamaterial unit, as shown in Fig. 1A, is composed of four isosceles right-angled triangular blocks connected by four hinges (black arcs), which form a planar four-bar linkage. Leveraging the kinematic bifurcation behavior of the unit, researchers tessellate these units in a plane to create a single degree of freedom (DOF) reconfigurable hierarchical metamaterial. The proposed metamaterial can switch between various configurations and maintain a single DOF throughout their motion paths except at bifurcation points. Researchers define the hierarchy of the metamaterial based on the size of triangular blocks in the four-bar linkages. For instance, a 2×2 metamaterial can reconfigure into single-level configurations with four level 0 units, two level 1 units, or one level 2 unit. During this process, the hinges enclosed in the larger blocks do not rotate and are thus considered inactive (grey arcs). Correspondingly, the number of active hinges varies during reconfiguration, as shown in Fig. 1C, where the number of active hinges at the three levels is respectively 22, 14, and 6. Fig. 1. Design of reconfigurable metamaterials and their hierarchical levels Beyond single-level configurations, the metamaterial can also be reconfigured to contain units of different levels, thus forming various multi-level configurations (Fig. 2). For example, a 2×2 metamaterial can form a multi-level configuration with two level 0 units and one level 1 unit (Fig. 2A). Since the grey configuration can be obtained by vertically mirroring the blue configuration, they are symmetry-equivalent and expected to yield identical stiffness. Therefore, researchers exclude configurations that are symmetry-equivalent by symmetry operations (second-order rotational symmetry, vertical mirroring, or horizontal mirroring), using a developed screening procedure. They retain only one representative configuration from each set of mutually symmetry-equivalent configurations, thereby identifying the symmetry-unique configurations. Further extending metamaterials to 2×4 and even 4×4 configurations significantly increases the number of multi-level configurations, encompassing hierarchical levels such as 0&1, 0&1&2, 0&2&3, and 0&1&2&3 (Movie S1). To generalize, researchers calculated the number of multi-level configurations and total configurations for a metamaterial with the highest level i through recursive analysis, where the number of symmetry-unique configurations is determined by an automated screening procedure (Fig. 2D). Fig. 2. Reconfiguration analysis of the multi-level configurations
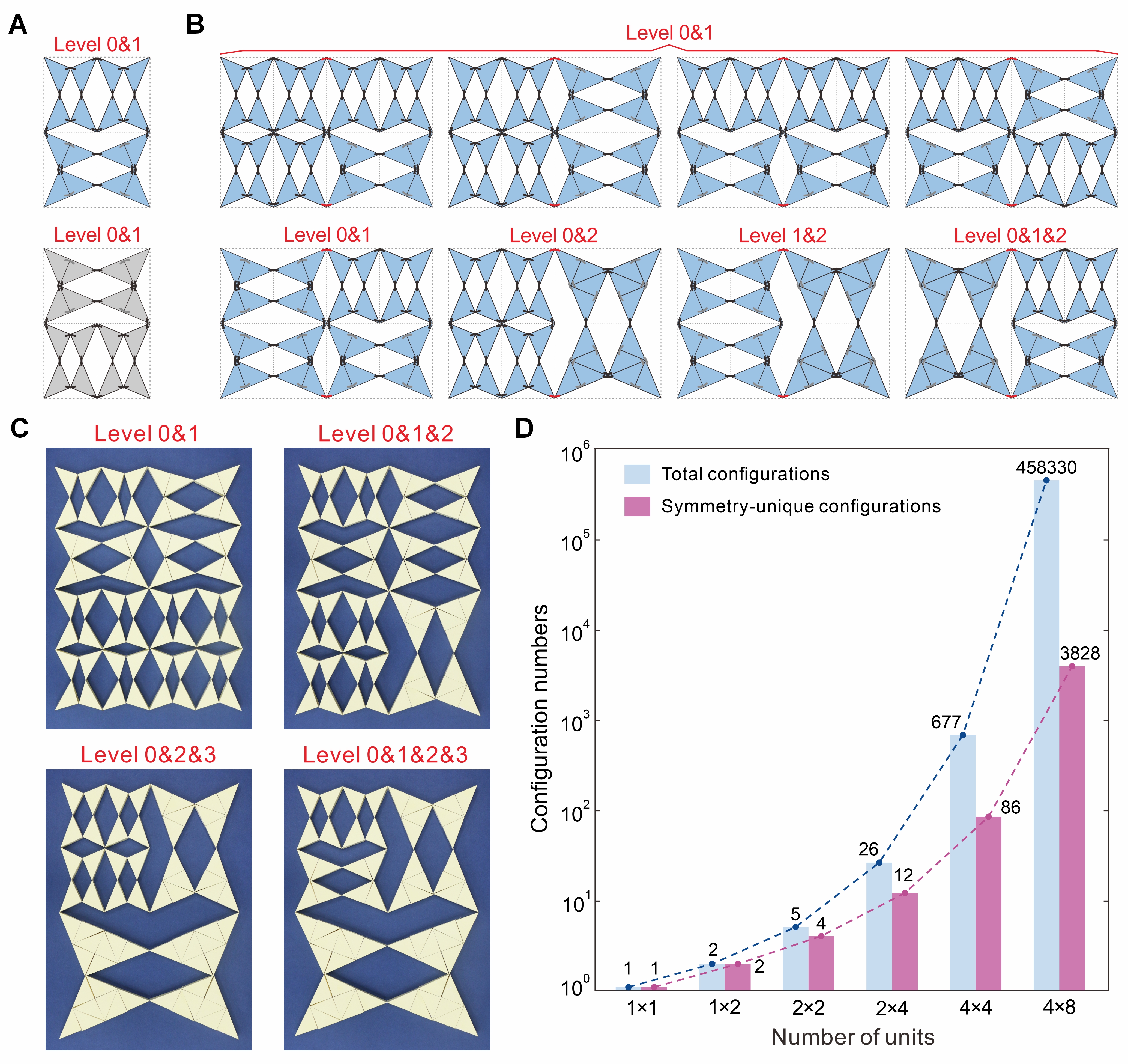
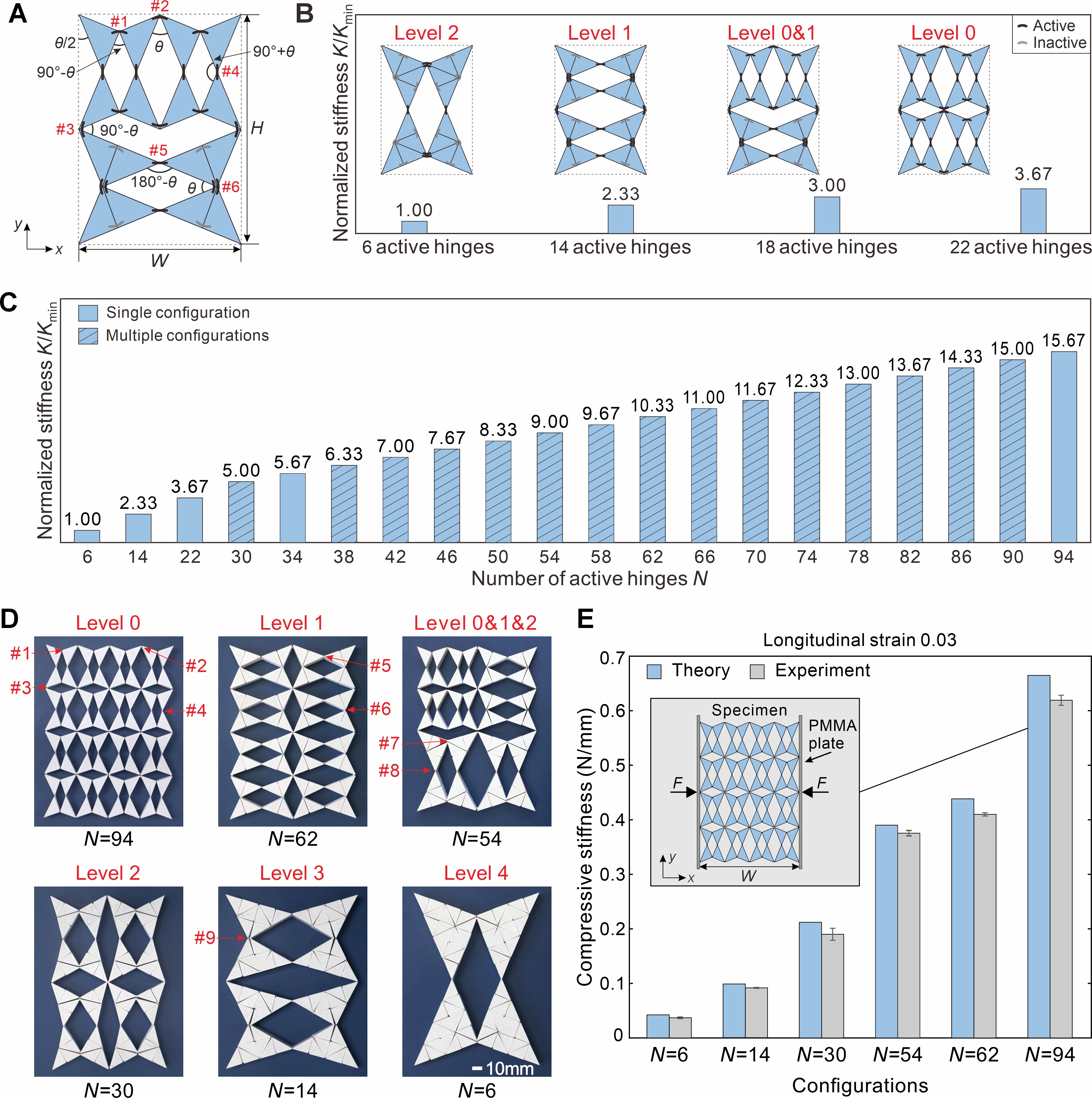
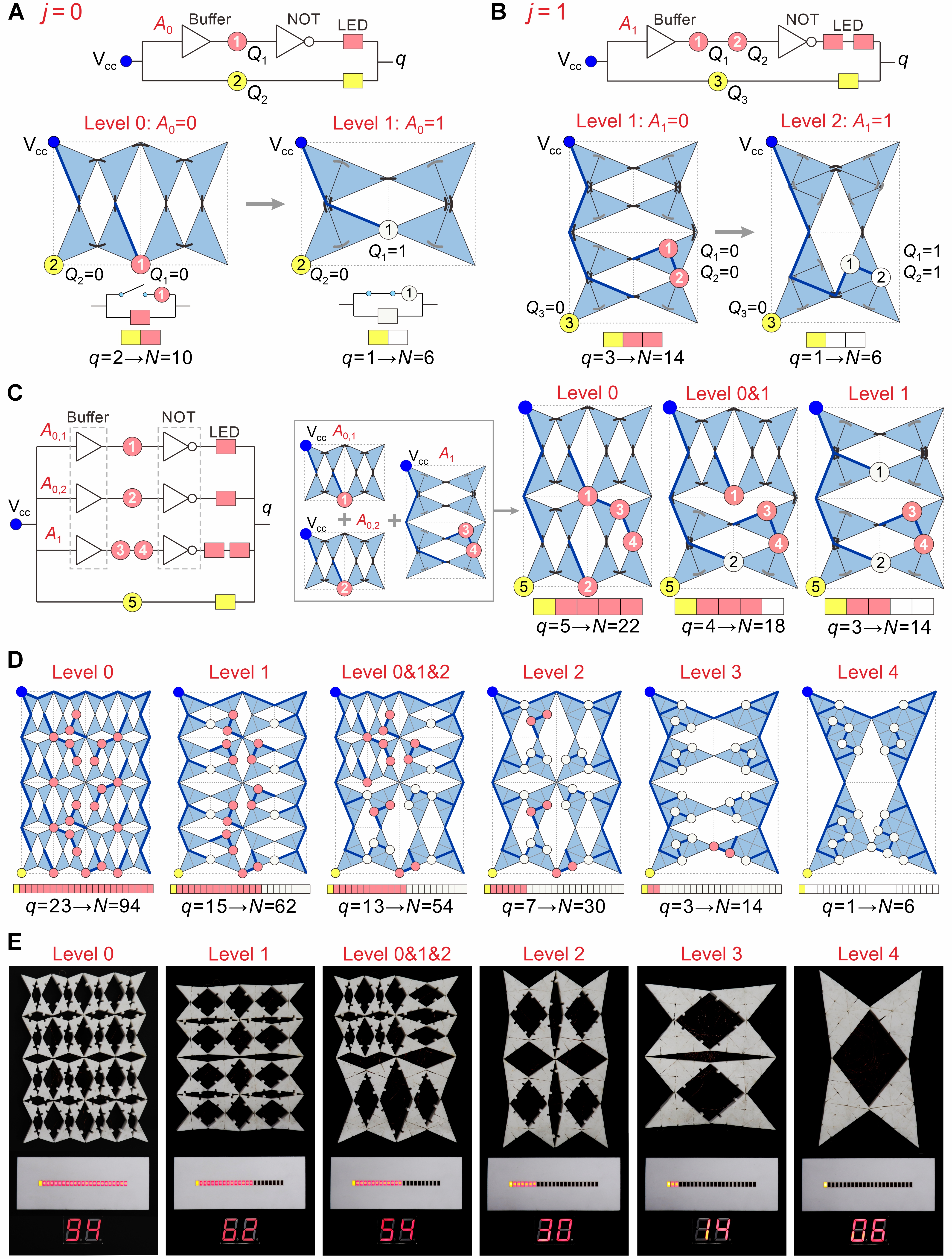
Movie S1 The reconfiguration process of a 4×4 metamaterial among 10 configurations The hierarchical reconfiguration, which leads to the variation of active hinges and single DOF motion behavior of the metamaterial, enables tunable stiffness over a wide range. Through theoretical modelling, researchers discover a linear relationship between the number of active hinges and the stiffness of the metamaterial when the rotational stiffness of each hinge is identical. For example, when the size of the metamaterial reaches 4×4, it includes 86 configurations with 20 different active hinge numbers of 6, 14, 22, 30, 34, 38, 42, 46, 50, 54, 58, 62, 66, 70, 74, 78, 82, 86, 90 and 94, leading to a wider tunability ratio of 15.67 (Fig. 3C). These experimental results confirm that the theoretical model accurately predicts the stiffness of metamaterials. Fig. 3. Tunable stiffness in hierarchical metamaterials Finally, to visualize the stiffness of the hierarchical metamaterial in real time, we integrate reconfigurable circuits in the metamaterial to map the transitions among units at different levels to the multichannel electrical outputs. This establishes a linear relationship between structure, properties, and information, enabling the metamaterial to display the number of active hinges and stiffness in various configurations without the need for external sensors. The experimental results (Fig. 4E and Movie S2) show that the number of active hinges as the 4×4 metamaterial reconfigures among 10 configurations (five single-level and five multi-level) can be accurately visualized by the lit LEDs and the 7-segment display, which demonstrate the reliability of the proposed design for real-time stiffness visualization in hierarchical metamaterials without external sensors. Fig. 4. Visualization of the number of active hinges in hierarchical metamaterials with tunable stiffness
Movie S2 Real-time stiffness visualization of the 4×4 metamaterial To summarize, this research presents a reconfigurable hierarchical metamaterial, establishes a linear relationship between its stiffness and the number of active hinges, and embeds mechanical logic circuits into the metamaterial. This enables a wide range of tunable stiffness and real-time stiffness visualization without the need for external sensors, paving the way for intelligent systems with self-sensing and adaptive capabilities.
Kaili Xi#, Xiaoyi Jiang#, Dechen Zhao, Guimin Chen, Jiayao Ma*, Yan Chen*. Design and Visualization of a Hierarchical Metamaterial with Tunable Stiffness. Research. 2025, 8:0874.. |