|
New Publication: Advanced Robotics Research | Dr. Weiqi Liu and Dr. Chunlong Wang published an amphibious origami robot
From: Date: 2025-11-12 From the leaps of a frog into water to the agile movements of mudskippers across tidal flats, many small animals can effortlessly navigate both land and water. Their locomotion strategies, though seemingly simple, achieve remarkable efficiency. Replicating such versatile movement in robotics, however, is far from straightforward. Terrestrial crawling and underwater propulsion are governed by fundamentally different mechanics, and conventional robotic designs typically rely on multiple actuators and sophisticated control systems, which complicates efforts to maintain compact size, low weight, and high reliability. Consequently, a key challenge in amphibious robotics is developing a minimalist system that can traverse these two radically different environments using the fewest possible actuators. Recently, Professor Yan Chen’s team at Tianjin University proposed an origami-inspired amphibious robot design. The robot relies on a single shape-memory-alloy (SMA) wire to achieve terrestrial crawling, jet-like underwater propulsion, and directional control. This research provides a new paradigm for integrated design of structure, actuation, and locomotion in soft robotics. The work was published in Wiley’s new robotics journal Advanced Robotics Research. Corresponding authors are Professors Jiayao Ma and Yan Chen, and the first authors are Dr. Weiqi Liu and Chunlong Wang from the School of Mechanical Engineering, Tianjin University. Master’s student Xiaohang Sun also made significant contributions. This research was supported by the National Natural Science Foundation of China, the New Cornerstone Science Foundation through the XPLORER PRIZE, and the National key R&D Program of China.
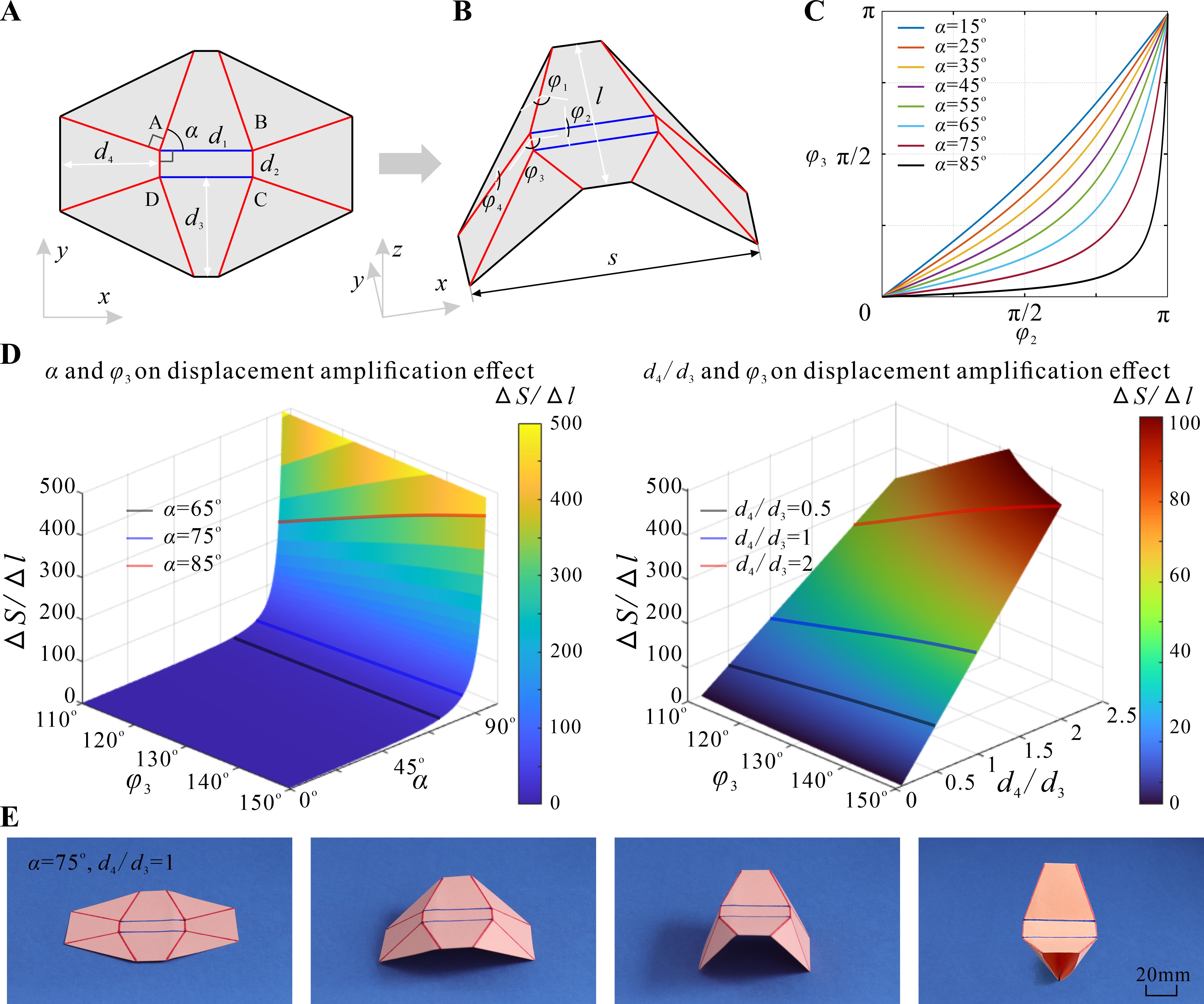
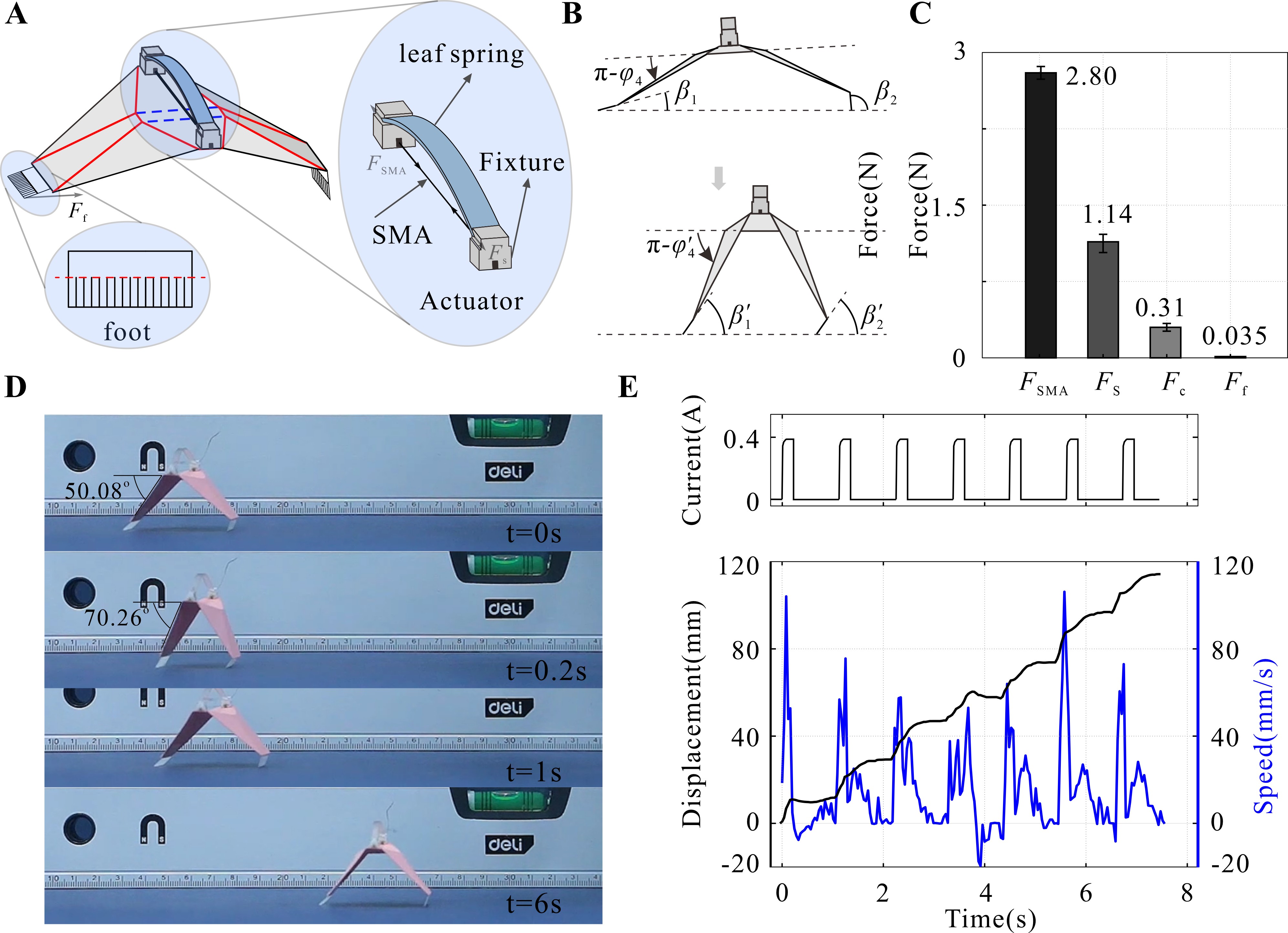
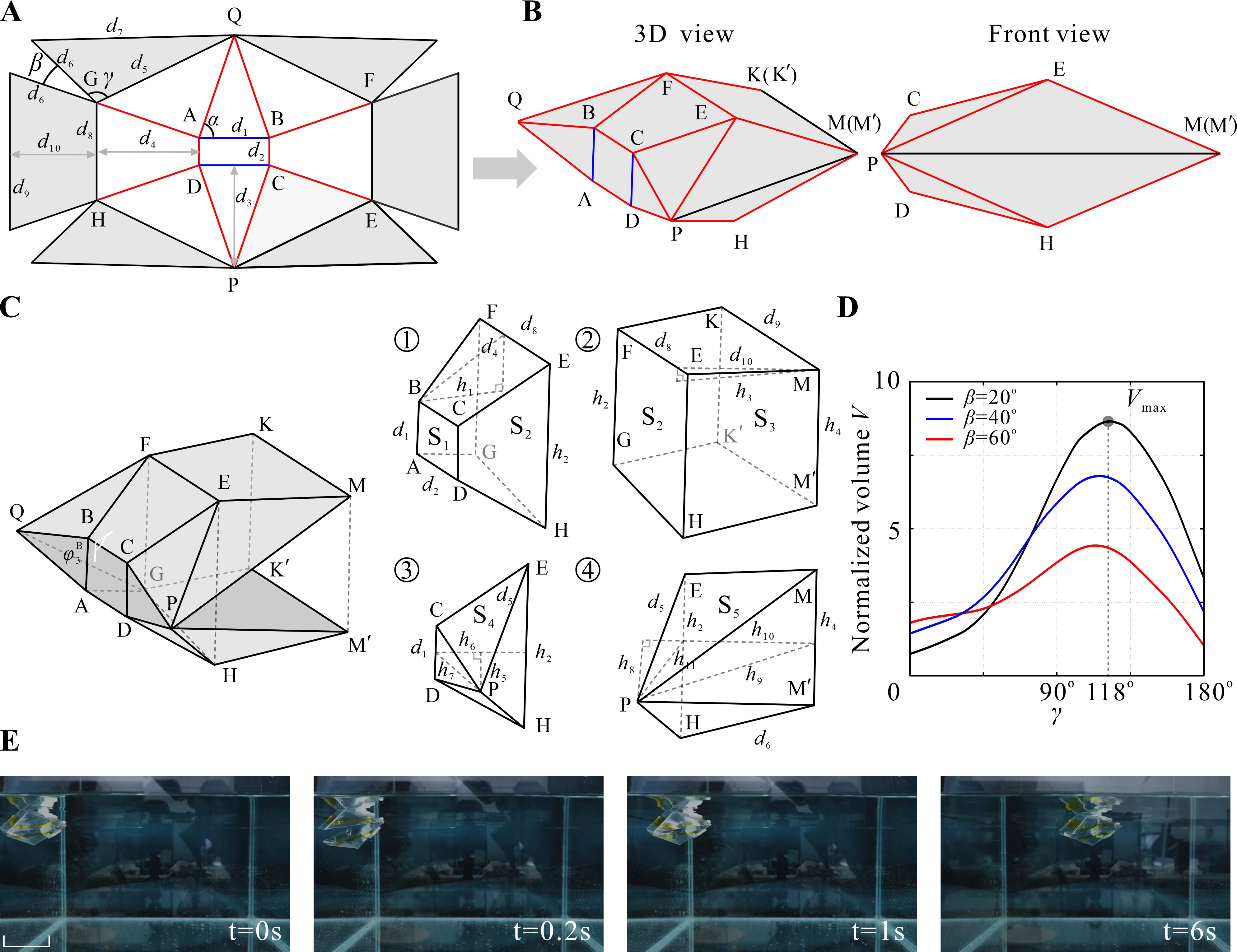
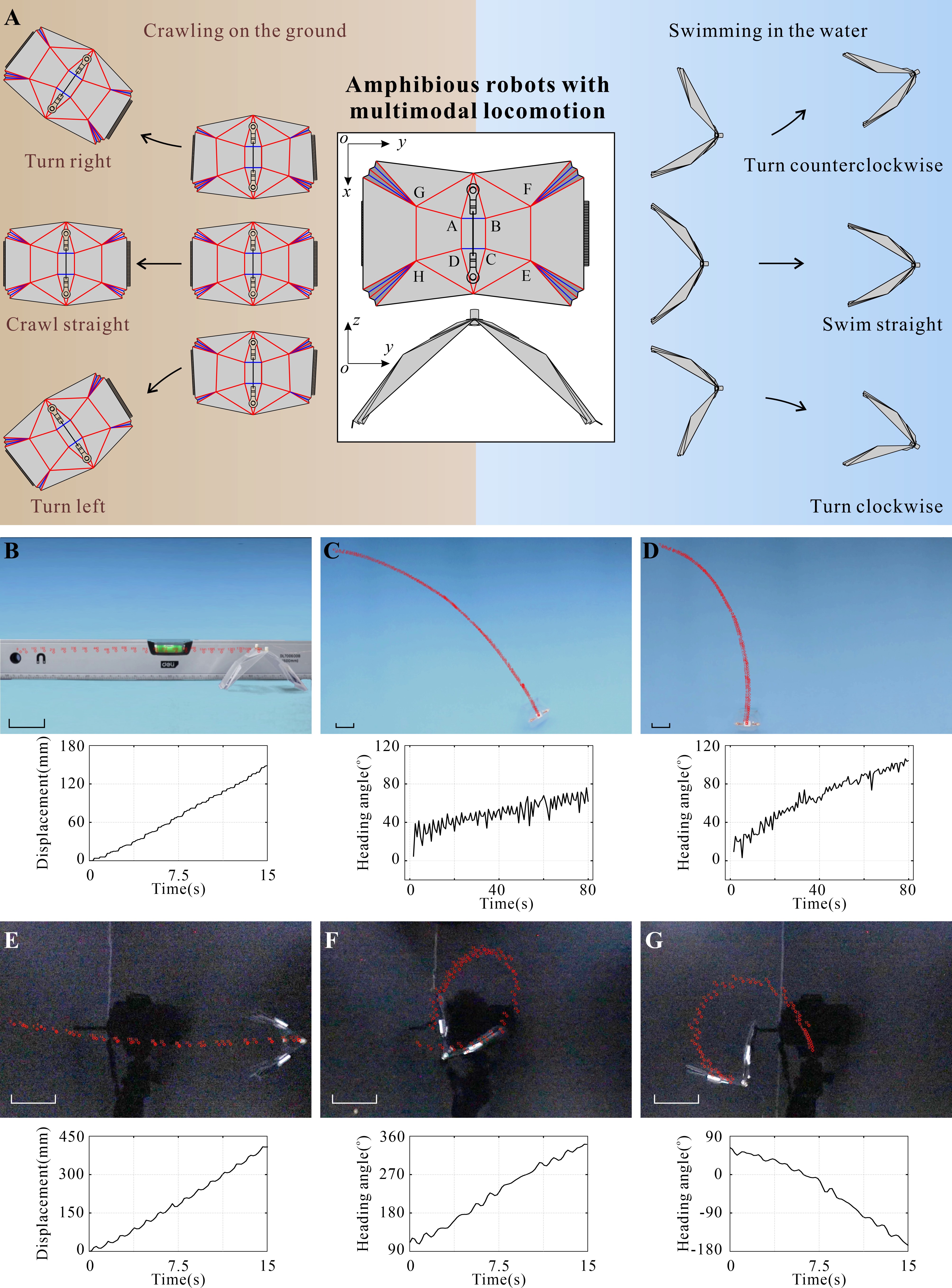
Video 1. Video abstract of aquatic-terrestrial amphibious robots Inspired by origami art, the research team designed a displacement-amplifying origami structure (Figure 1). The structure consists of four identical 4-crease vertices (A, B, C, D) connected through shared creases to form a closed loop, with both horizontal and vertical mirror symmetry. Each vertex and the overall loop strictly satisfy rigid flat-folding conditions, ensuring that the sheet can unfold flat while folding into a stable three-dimensional configuration. Kinematic analysis treats creases as hinges, panels as links, and each vertex as a spherical four-revolute linkage, so that the entire origami structure can be regarded as an assembly of four spherical four-revolute linkages. The kinematic model shows that as the sector angle α increases from 15° to 85°, small input angle variations can be significantly amplified within a specific range, generating large output angles. Further analysis indicates that small displacements along the y-direction produce significant responses along the x-direction, achieving efficient motion transmission. This displacement amplification provides a natural advantage for achieving large-scale motion with limited degrees of freedom, forming a reliable structural foundation for robotic applications. Figure 1. Geometry and kinematics of single-DOF origami pattern with displacement amplification. After verifying the displacement amplification effect, the structure was applied to a terrestrial crawling robot (Figure 2). The robot is composed of the origami body, an SMA actuator, and anisotropic feet. The actuator consists of SMA wires, a leaf spring, and 3D-printed fixtures: applying voltage contracts the SMA wire to generate driving force, while the spring provides restoring force to recover the structure. The feet are comb-like PET strips installed at the head and tail at different fixed angles, generating anisotropic friction for alternating anchoring and sliding, thus achieving continuous crawling. Experiments show that a 0.782 g prototype, under 0.4 A and 1 Hz actuation, achieves 0.46 mm SMA contraction, which is amplified by the origami structure to drive the legs forward by 11.5 mm with an opening angle of ~20°. Using the displacement amplification effect, the robot achieves a crawling speed of 11.56 mm/s (~0.16 BL/s). Figure 2. Terrestrial crawling origami robot based on origami pattern with displacement amplification. The team then extended the origami structure to underwater propulsion (Figure 3). Based on the terrestrial crawling pattern, four triangular panels and two trapezoidal panels were added around the body to form a skirt-like structure. Although the newly introduced vertices E, F, G, H do not strictly satisfy flat-foldability, kinematic analysis of the closed loops shows that the overall structure remains a single-DOF system, forming a closed contour when folded. This closed contour traps and compresses water during folding and unfolding, providing the conditions for jet propulsion. During underwater motion, rapid folding expels water from the skirt toward the tail, generating backward jets that produce forward thrust; slow unfolding allows water to refill without cancelling propulsion, resulting in time-asymmetric volume changes for efficient jet-driven motion. Experiments demonstrate that under a single SMA actuator, the prototype robot swims steadily at ~27.99 mm/s (~0.37 BL/s). Figure 3. Origami swimming robot utilizing periodic drainage volume modulation for underwater propulsion. To overcome the limitation of straight-line motion on land and underwater, fan-shaped units were added between the triangular and trapezoidal panels (Figure 4). This modification converts four-crease vertices into eight-crease vertices, enhancing flexibility while retaining the single-sheet fabrication advantage. On land, pre-folding the fan units breaks symmetry in foot friction, enabling left and right turns. Underwater, asymmetric convex-concave vertex configurations create differential water ejection velocities, generating turning moments for directional control. Experiments with a 1.48 g prototype show straight-line crawling at 9.89 mm/s (~0.12 BL/s), while pre-folding the fan units at 50% and 100% achieves average turning speeds of 0.58°/s and 1.01°/s, respectively. Swimming speed reaches 25.3 mm/s (~0.29 BL/s), with clockwise and counterclockwise turning speeds of 9.76°/s and 10.90°/s, respectively. Figure 4. Aquatic-terrestrial amphibious origami robot with multimodal locomotion enabled by fan-shaped units. In summary, by integrating rigidly foldable origami structures with SMA actuation, the study demonstrates large-scale motion amplification from minimal actuation, enabling seamless transitions between terrestrial crawling and underwater jet propulsion. This design opens new avenues for lightweight, multimodal, low-power amphibious robots and their potential applications in environmental monitoring, search and rescue, and reconnaissance.
Weiqi Liu#, Chunlong Wang#, Xiaohang Sun, Hongwei Guo, Jiayao Ma*, Yan Chen*, Origami-Inspired Structural Design for Aquatic-Terrestrial Amphibious Robots, Advanced Robotics Research, 2025, 0, e202500171. |