|
New Publication: Fundamental Research | Kaili Xi published A family of multi-stable mechanisms based on the threefold-symmetric Bricard linkage
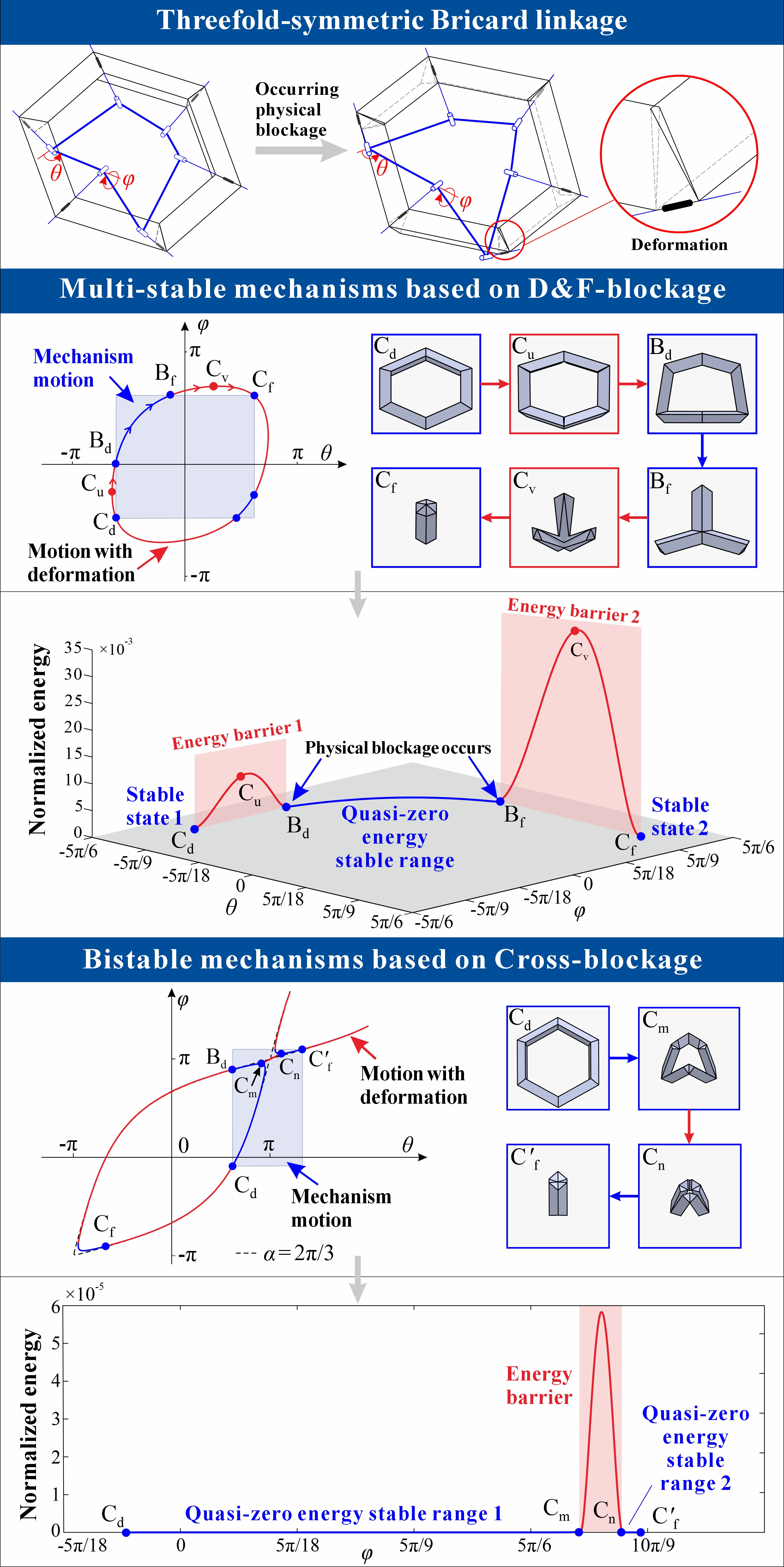
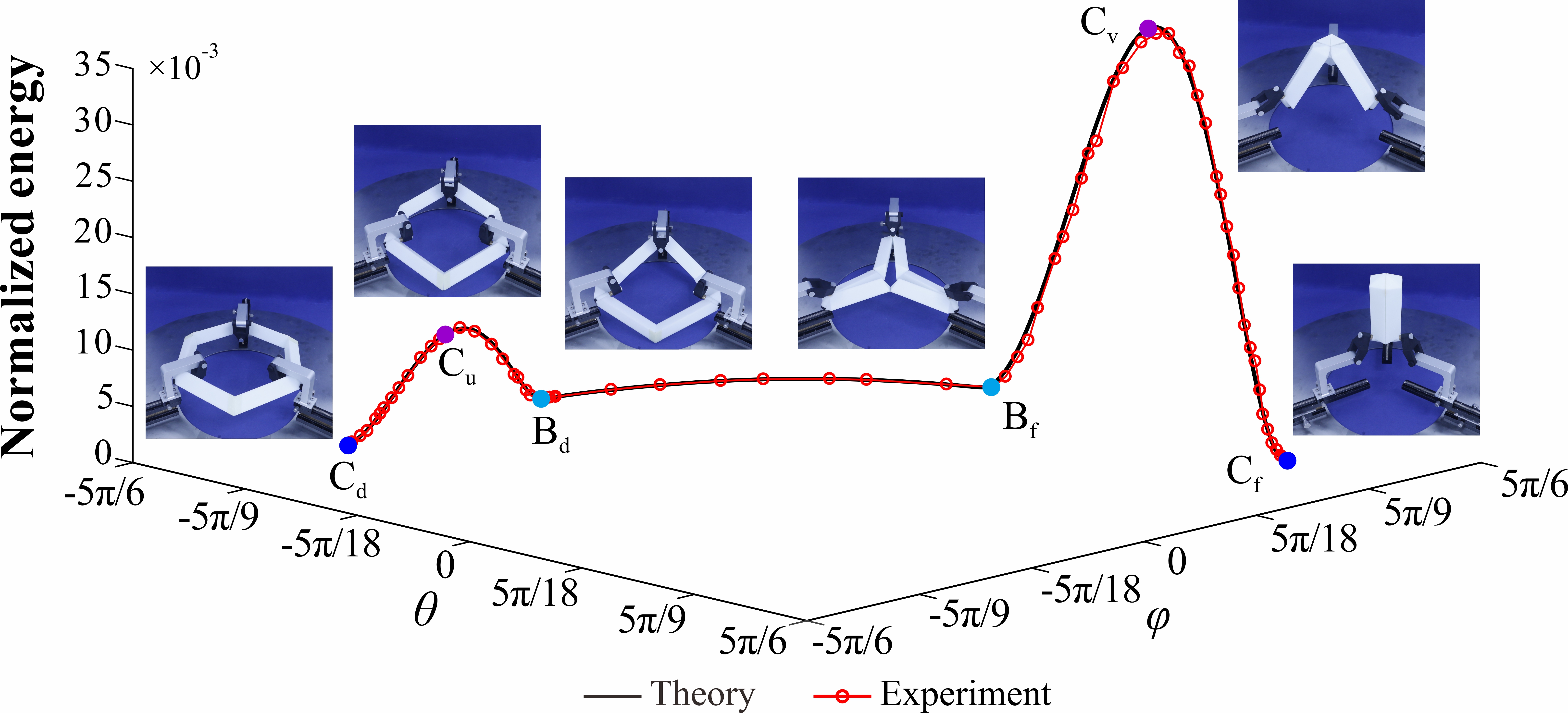
From: Date: 2025-12-06 This work proposes a family of multi-stable mechanisms based on the threefold-symmetric Bricard linkage, which have both finite mechanism motion ranges and discrete stable states. By utilizing the intrinsic physical blockages during the motion of the threefold-symmetric Bricard linkage, stretchable elastic membranes are introduced to replace a set of conventional revolute joints, thereby overcoming these physical blockages and enabling the design of two types of multi-stable mechanisms. The first allows two stable states respectively at the fully deployed and folded configurations and a continuous mechanism motion range in between, while the second exhibits two mechanism motion ranges separated by an energy barrier. This work is expected to open up a new avenue for the development of multi-stable mechanisms, broadening their application across diverse engineering fields. Background Multi-stable structures, which can rapidly switch between multiple stable equilibrium states, are important in various engineering applications, including robotics, energy absorption, and mechanical computing. However, most current multi-stable structure designs are based on combinations of bistable units, which typically have limited deformation capabilities. By extending the discrete stable state into a finite range of mechanism motion, the research team has created multi-stable mechanisms that significantly enhance deformation capabilities and enable functions such as large deployable ratios. Results Due to geometric constraints, the threefold-symmetric Bricard linkage encounters physical blockages under specific design parameters, resulting in structural deformation and impeding further movement. First, the team conducted a kinematic analysis to determine the two main types of physical blockages (Figure 1). The first type of physical blockage occurs near the deployed configuration (Cd) and folded configuration (Cf). The red curves indicate the motion paths with deformation, while the blue curves represent the mechanism motion ranges without interference. This phenomenon is denoted as D&F-blockage. The second type of physical blockage appears in the middle section of the motion path. The mechanism has a segment of motion range in each of two adjacent cycles, requiring the overcoming of physical blockage to cross the cycle and thereby achieve the complete motion from the deployed configuration to the folded configuration. This phenomenon is called Cross-blockage. To overcome physical blockages in the motion of the threefold-symmetric Bricard linkage, the team replaced conventional revolute joints with elastic membranes, creating elastic joints. Like conventional joints, these elastic joints rotate normally, but they can deform to overcome physical blockages and store elastic energy. This enables the mechanism to maintain stability in specific configurations. On this basis, the team developed two types of multi-stable mechanisms (Figure 1). The first, based on D&F-blockage, exhibits stable states in both the deployed and folded configurations, with a quasi-zero energy mechanism motion range in between. This design satisfies the stability requirements for both folded and deployed configurations in deployable structures while enabling continuous switching. The second, based on Cross-blockage, features two quasi-zero energy mechanism motion ranges separated by an energy barrier. After overcoming the barrier, the mechanism can transition to the other motion range, making it suitable for applications requiring distinct functions in different states. Figure 1 Two types of multi-stable mechanisms To verify the proposed multi-stable mechanisms, the team developed theoretical models and conducted experimental tests. The results showed that the performance of the multi-stable mechanisms aligned well with the theoretical analysis: stable deployed and folded configurations, smooth intermediate motion, and energy generated by elastic membrane deformation that was consistent with the theoretical prediction (Figure 2). Figure 2 Theoretical and experimental results of the D&F-blockage multi-stable mechanism Future work The proposed multi-stable mechanisms have the potential to be used in various engineering fields. For instance, large-diameter space antennas are folded into compact configurations to save storage space on transport rockets and are then deployed into specific shapes in orbit to perform various tasks. The stable deployed and folded configurations of the proposed mechanism, along with its ability to switch between them, make it well-suited for such applications. In the future, the team plans to extend this design strategy to develop more multi-stable mechanisms that meet diverse requirements. Authors Jiayao Ma is a professor in Mechanical Engineering at Tianjin University. He received his Ph.D. degree in Engineering Science from University of Oxford (2011) and BEng degree in Civil Engineering from Zhejiang University (2007). His research focuses on the design and analysis of novel origami structures and metamaterials. He has published over 50 peer reviewed journal papers in Advanced Science, Research, Engineering, JMPS, etc. He was funded by the National Science Fund for Excellent Young Scholar. Yan Chen is currently a Chair Professor in Tianjin University and the Deputy Director in Key Laboratory of Mechanism Theory and Equipment Design, Ministry of Education. Her research focuses on the kinematics of spatial mechanism, design of deployable structures, origami metamaterials, and mechanical intelligent robots. She has published more than 90 journal papers in Science, Nature Communications, PNAS, AFM, Research, Engineering, MMT, etc. She was funded by the National Science Fund for Distinguished Young Scholars, and won the Xplorer Prize 2020.
Yan Chen, Kaili Xi, Xiao Zhang, Zhong You, Ming Li, Jiayao Ma*. A family of multi-stable mechanisms based on the threefold-symmetric Bricard linkage. Fundamental Research. 2025. |