|
New Publication: International Journal of Mechanical Sciences| Sibo Chai published Panel-Driven Actuation Framework for Curved-Crease Origami
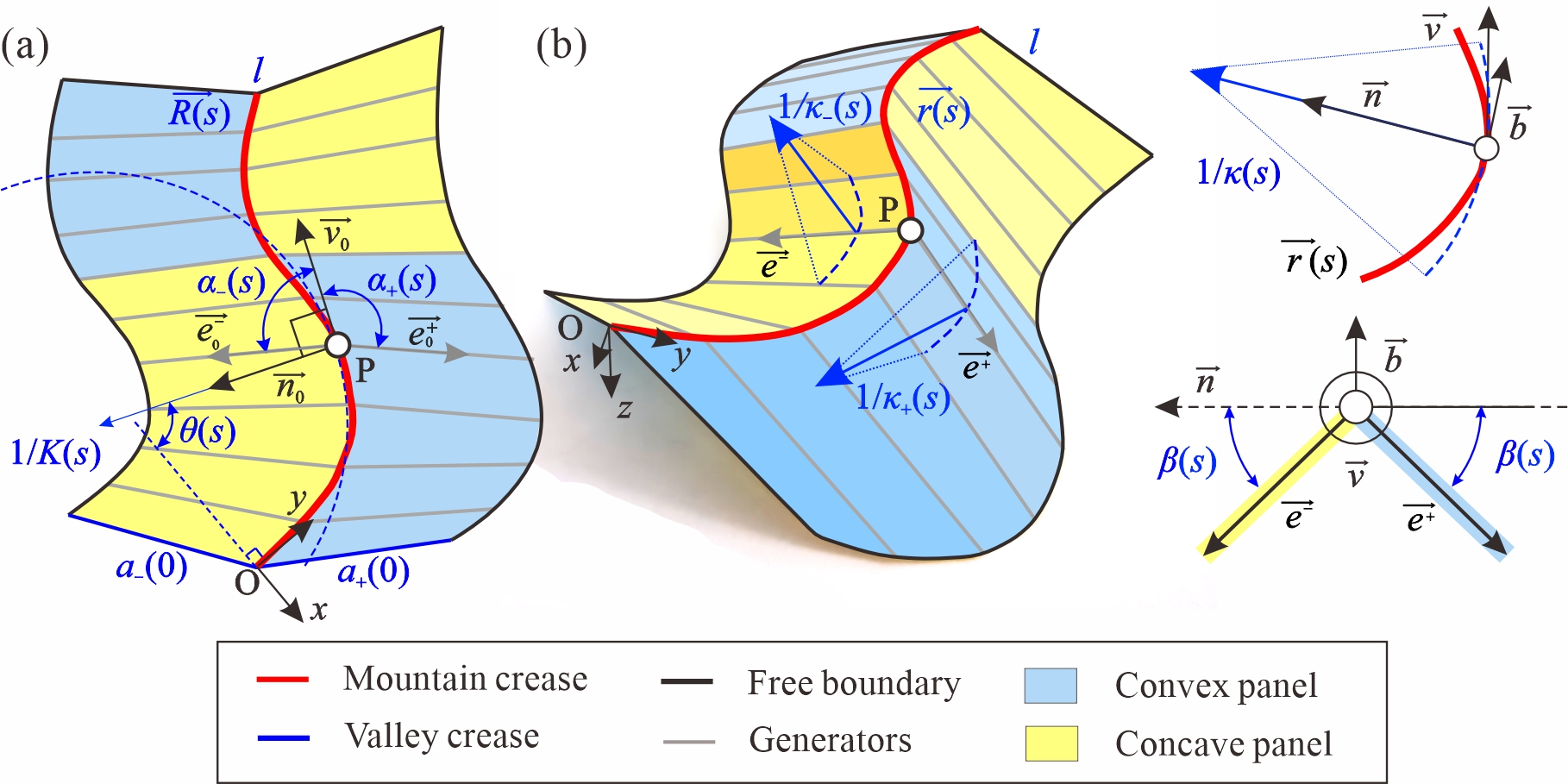
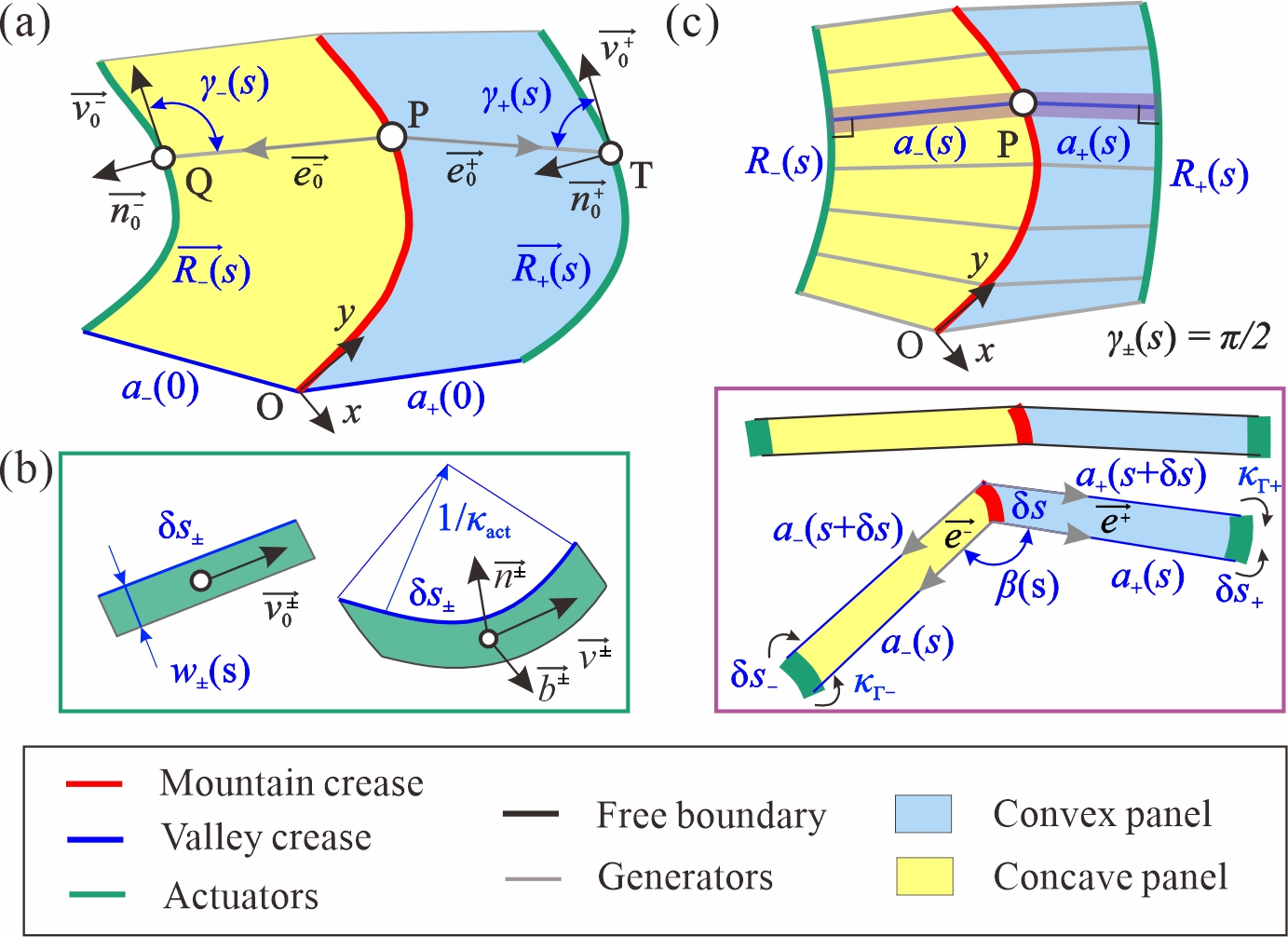
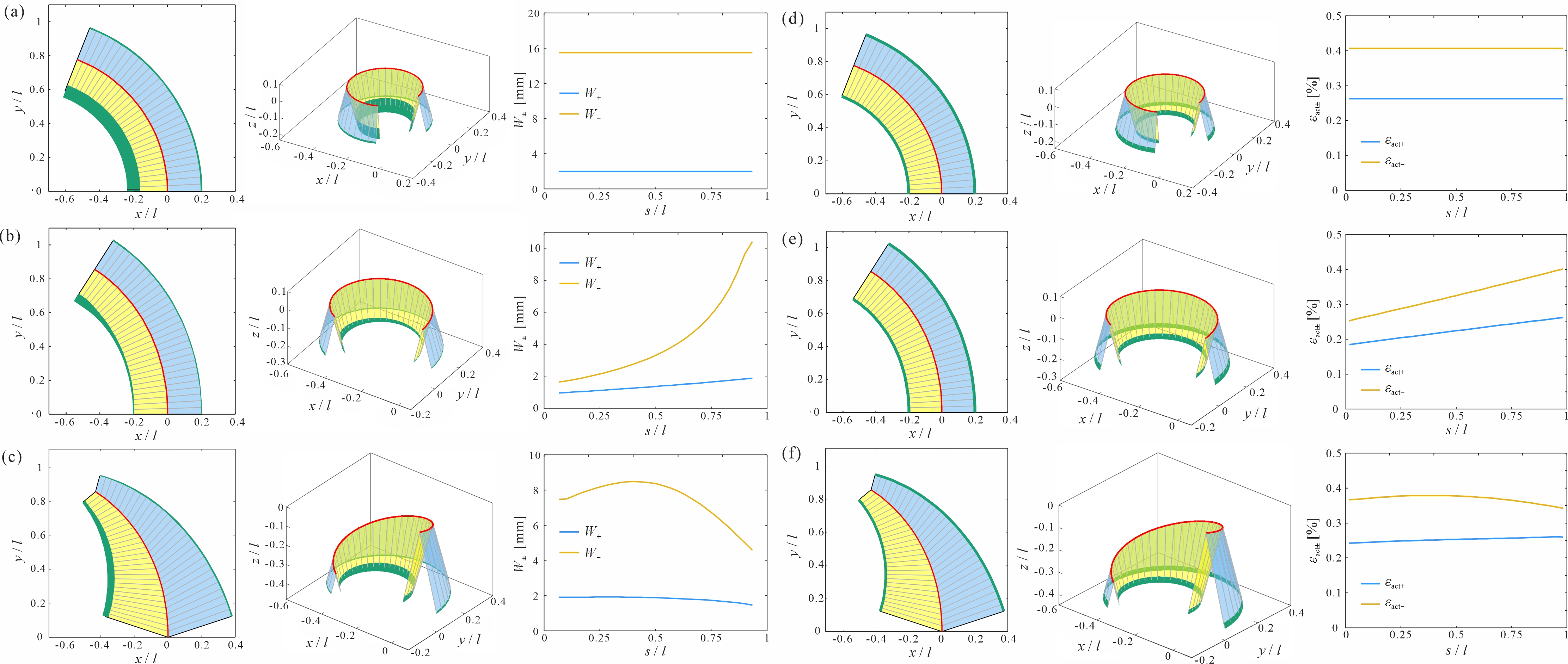
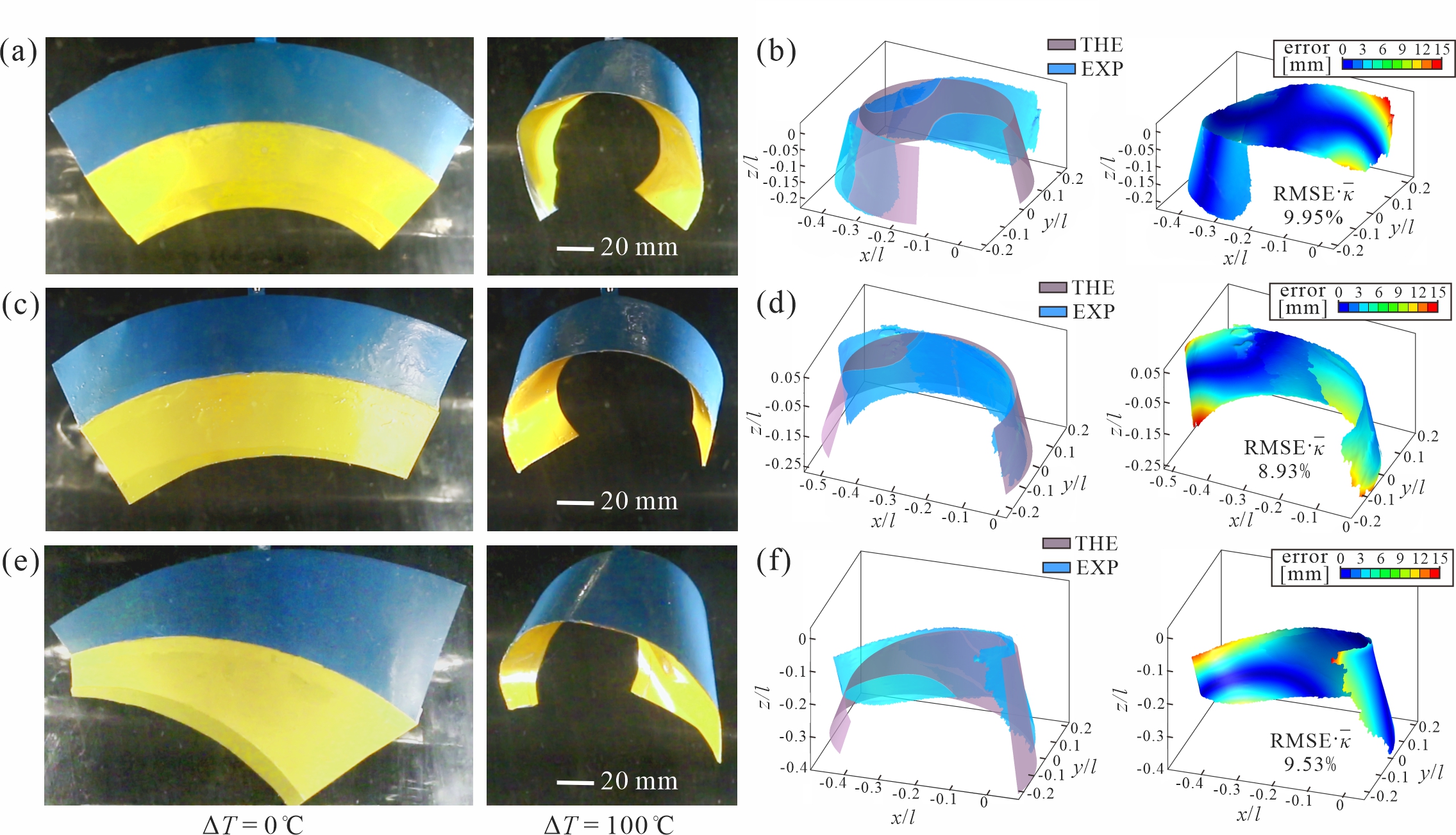
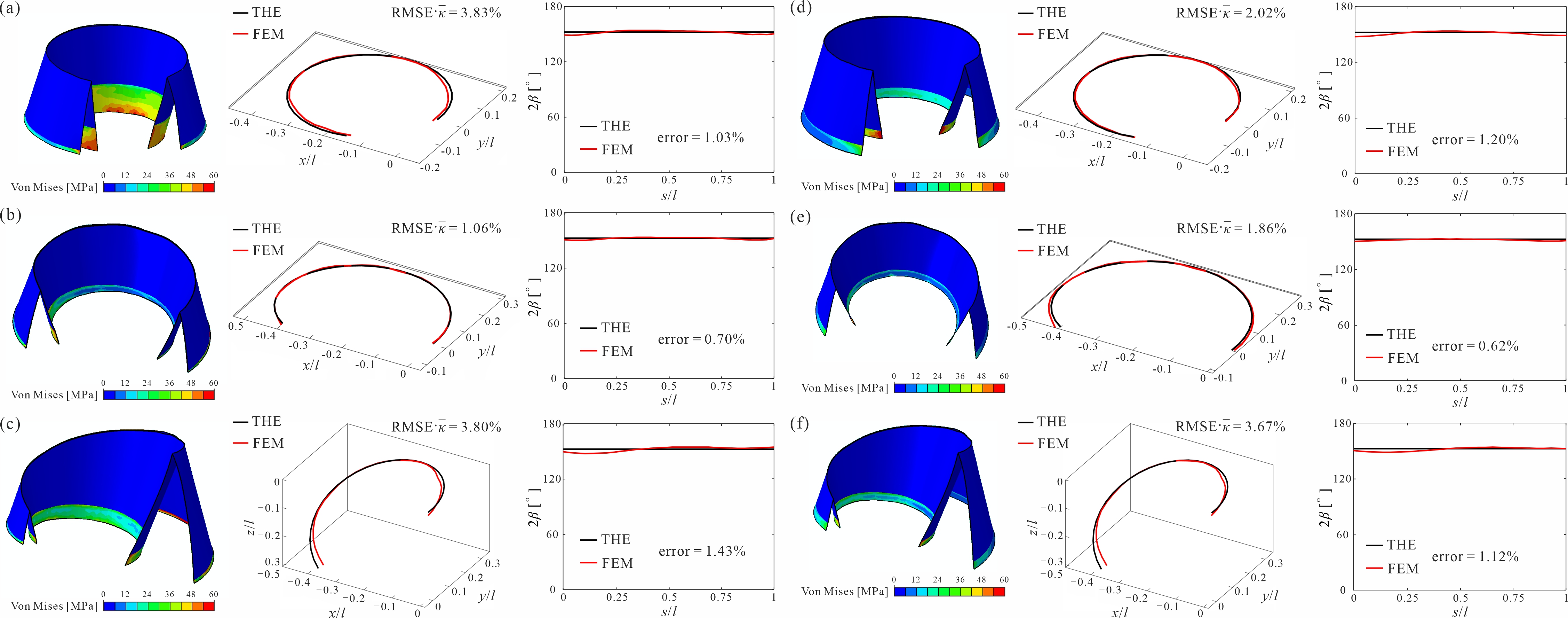
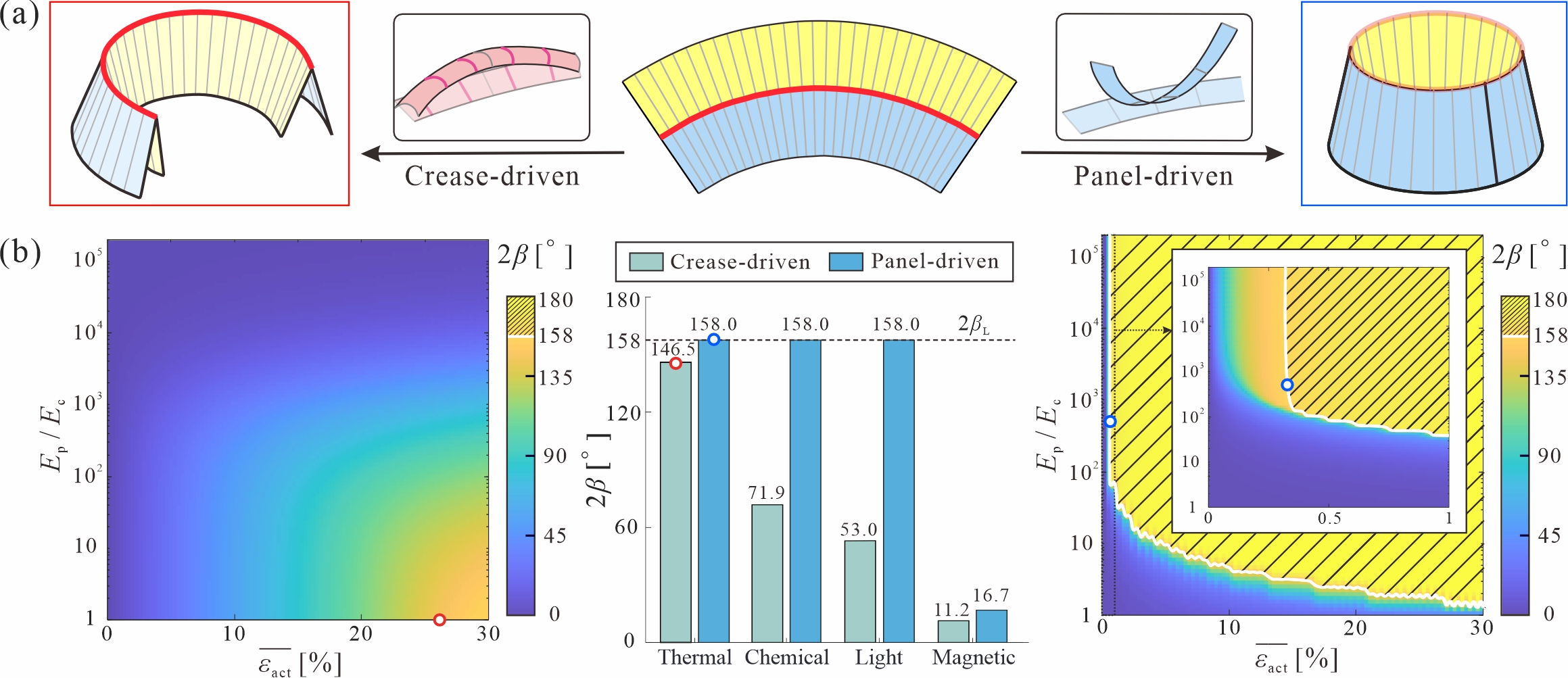
From: Date: 2026-02-09 Curved-crease origami, a variant of non-rigid foldable origami, is characterized by folding along curved creases with panels undergoing bending deformation. Compared with straight-crease origami, curved-crease origami significantly expands the design space by introducing inherent curvature into the creases, enabling diverse functionalities such as shape morphing, tunable stiffness, energy absorption, and vibration isolation. However, effective actuation methods are still essential to achieve controlled transformation from a flat sheet into a functional three-dimensional configuration. Traditional actuation methods position stimuli-responsive materials along the creases to induce self-bending and drive folding. Although this approach can effectively actuate straight-crease origami, the narrow crease region provides limited torque, which is insufficient to overcome the bending deformation of the panels, resulting in low actuation efficiency. Moreover, how to achieve programmable morphing from a single flat pattern to complex target configurations through active actuation, especially for torsional deformation that deviates from natural energy-minimizing paths, remains a critical challenge in current research. To address these challenges, the research team led by Professor Jiayao Ma at Tianjin University proposed a panel-driven actuation framework for curved-crease origami. This framework determines the optimal arrangement of actuator strips perpendicular to the generators, and proposes two actuation strategies: programmable-width actuation and programmable-strain actuation, thereby achieving efficient self-folding of curved-crease origami structures and precise programming control of complex three-dimensional configurations. The research results, entitled "Panel-driven actuation framework for curved-crease origami", were published online on January 27, 2026 in International Journal of Mechanical Sciences. The corresponding author is Professor Jiayao Ma from Tianjin University, and the first author is PhD student Sibo Chai. Professor Yan Chen from Tianjin University and Professor Zhong You from the University of Oxford also made important contributions to this research. This work is supported by the National Natural Science Foundation of China (Projects 52422502, 52375022, 524B2048, 52192631). The research team first established the geometric model and folding kinematics framework for general curved-crease origami, systematically analyzing the effects of geometric parameters such as crease curvature and generator angle distributions on the structural folding deformation modes (Fig. 1). On this basis, bending actuator strips were integrated into the origami panels. Through theoretical derivation, it was confirmed that actuation efficiency is maximized when the actuator strips are aligned perpendicular to the generators (Fig. 2). To establish a quantitative relationship between actuation parameters and folding configurations, the curved-crease origami structure was discretized into finite crease-generator elements. By calculating the strain energy of the creases, panels, and actuator strips, the equilibrium relationship between actuation strain and folding angle was derived based on the minimum energy principle. Fig. 1 Geometric modeling and folding kinematics of general curved-crease origami Fig. 2 Optimal actuator arrangement and panel-driven actuation strategy For the parameter evolution along the curved crease direction of crease-generator elements, two programmable actuation strategies were proposed. The programmable-width actuation strategy maintains a constant actuation strain while programming deformation by adjusting the width of actuator strips along the actuator curve. The programmable-strain actuation strategy fixes the actuator strip width while adjusting the distribution of actuation strain along the path to achieve the target configuration (Fig. 3). Based on these two strategies, precise programming of various complex three-dimensional configurations was successfully achieved, including planar arcs, planar spirals, and spatial spirals. Notably, the spatial spiral configuration involves torsion of the crease, which deviates from the natural energy-minimizing deformation path and is difficult to achieve through conventional mechanical loading, further highlighting the unique advantages of the panel-driven method in achieving complex deformation modes. Fig. 3 Programmable-width and programmable-strain actuation strategies To validate the effectiveness of the proposed theoretical framework, experimental specimens corresponding to the programmable-width actuation strategy were fabricated using thermally responsive bimetal-polymer composites. The experiments successfully demonstrated self-folding actuation and programming of target configurations for three designs (Fig. 4). Quantitative analysis results showed good agreement between the deformed structural surfaces and theoretical target configurations, with normalized root mean square errors all below 10%, fully confirming the feasibility of the panel-driven method. In addition, both programmable actuation strategies were further validated through numerical simulations (Fig. 5). The results indicated that the geometric deviation of the deformed crease curves from the theoretical targets was less than 4%, and the folding angle error distributed along the creases was controlled within 2%. Fig. 4 Experimental validation of the programmable-width actuation strategy Fig. 5 Numerical simulation results of programmable-width and programmable-strain actuation strategies A systematic comparison was further conducted between the panel-driven and traditional crease-driven methods (Fig. 6). The results demonstrated that to achieve the same folding degree, the panel-driven method requires actuation strains nearly two orders of magnitude lower than the crease-driven method. Specifically, when the modulus ratio is greater than 100, the panel-driven method requires only 0.3% actuation strain to achieve the self-locked configuration; whereas the crease-driven method still struggles to reach the same configuration even under actuation strains as high as 30% at the optimal modulus ratio. This efficient actuation capability makes the panel-driven strategy applicable to most existing stimuli-responsive materials, including thermal, light, chemical, and magnetic responsive materials. Moreover, the crease-driven method is inherently unable to control the out-of-plane deformation of creases. Therefore, for configurations with identical crease curvature but different generator distributions (such as planar spiral and spatial spiral configurations), this method cannot distinguish between them, and thus cannot achieve programmable control of different curved surface morphologies. Fig. 6 Comparison of actuation efficiency between panel-driven and crease-driven methods In summary, this work proposed a panel-driven actuation framework for curved-crease origami. By establishing the geometric model and folding kinematics system for general curved-crease origami, the optimal actuator strip arrangement perpendicular to the generators was determined. Furthermore, two actuation strategies, programmable-width actuation and programmable-strain actuation, were proposed, achieving precise programming of various complex three-dimensional configurations including planar arcs, planar spirals, and spatial spirals, with actuation strains reduced by nearly two orders of magnitude compared to traditional crease-driven methods. This actuation framework lays a theoretical foundation for active folding and shape programming of curved-crease origami, and has broad application prospects in fields such as vibration isolation, energy absorption, and intelligent robotics.
Sibo Chai, Yan Chen, Zhong You, Jiayao Ma*. Panel-driven actuation framework for curved-crease origami. International Journal of Mechanical Sciences, 2026, 313, 111312. |