|
New Publication: Journal of Mechanisms and Robotics – Dr. Gu Yuanqing Publishes Overconstraint Reduction for Mechanism Networks of Threefold-symmetric Bricard Linkages
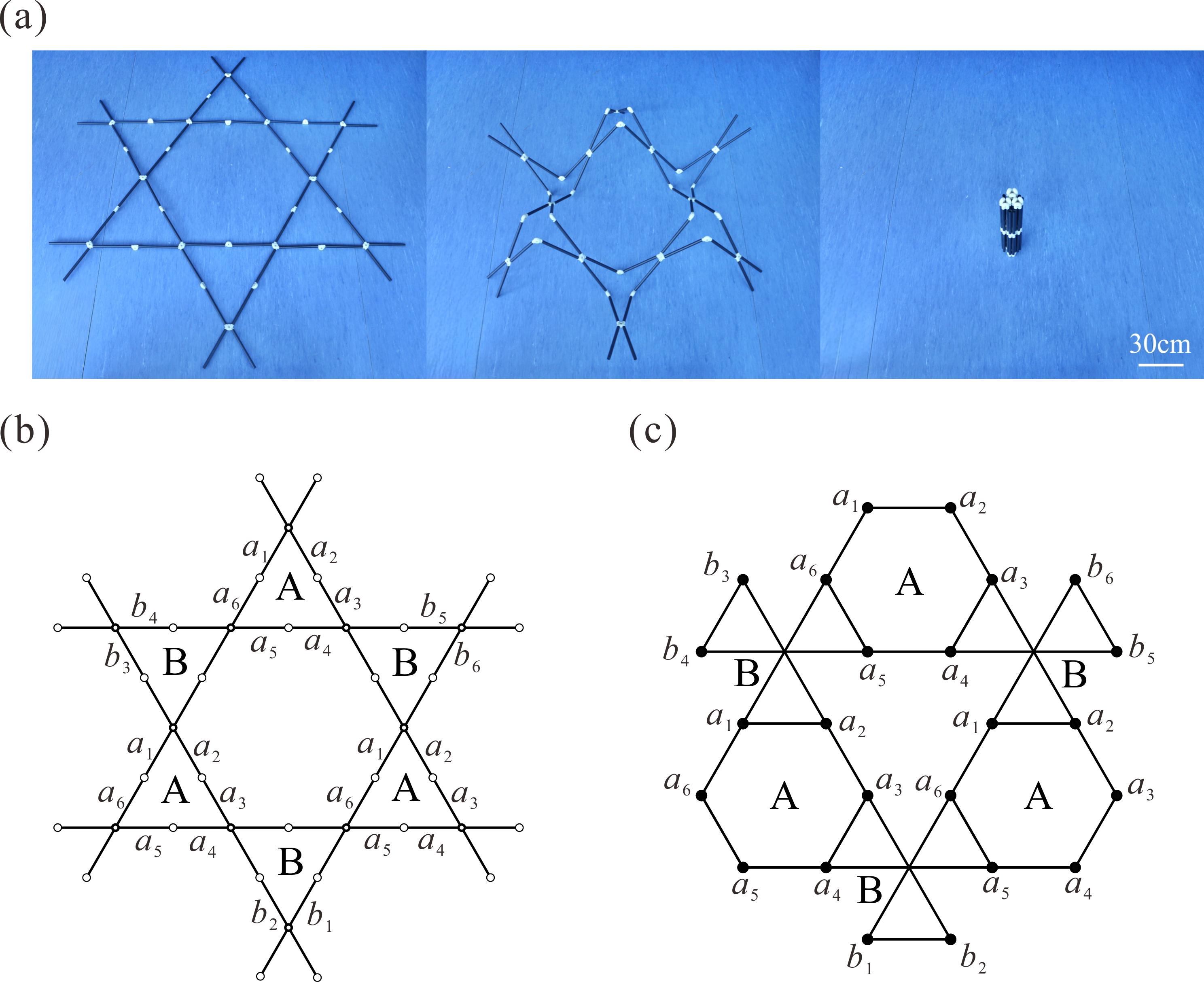
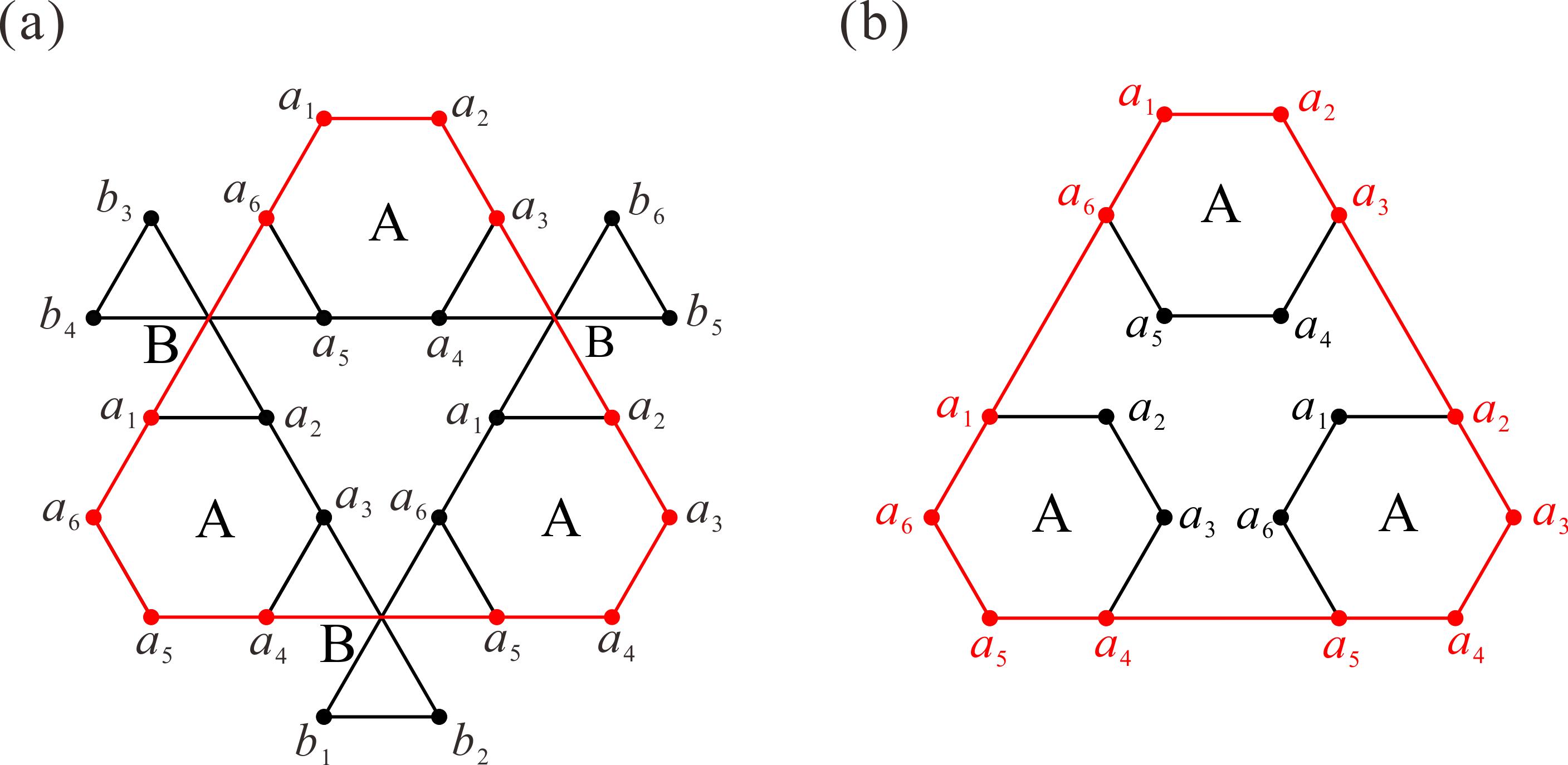
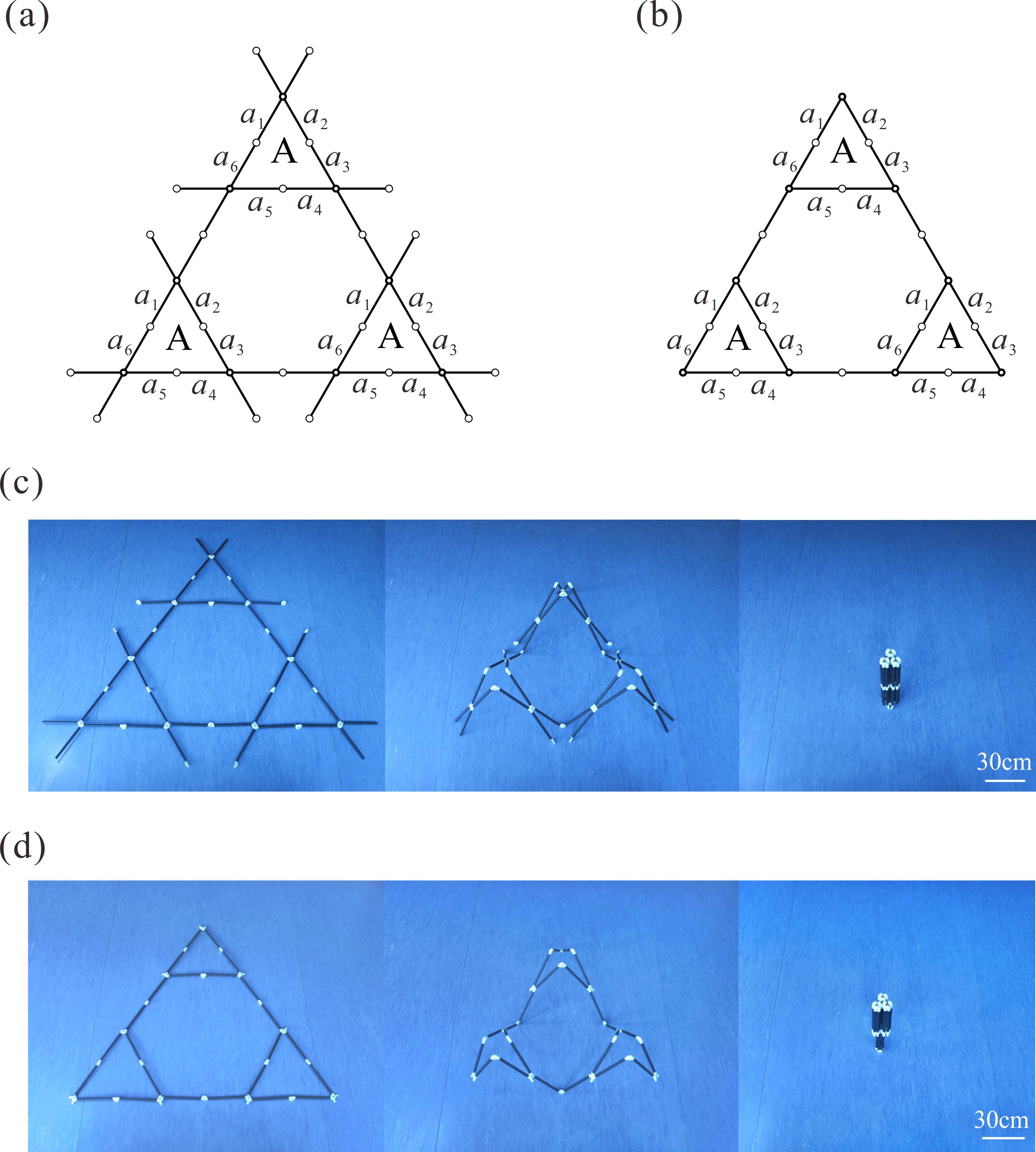
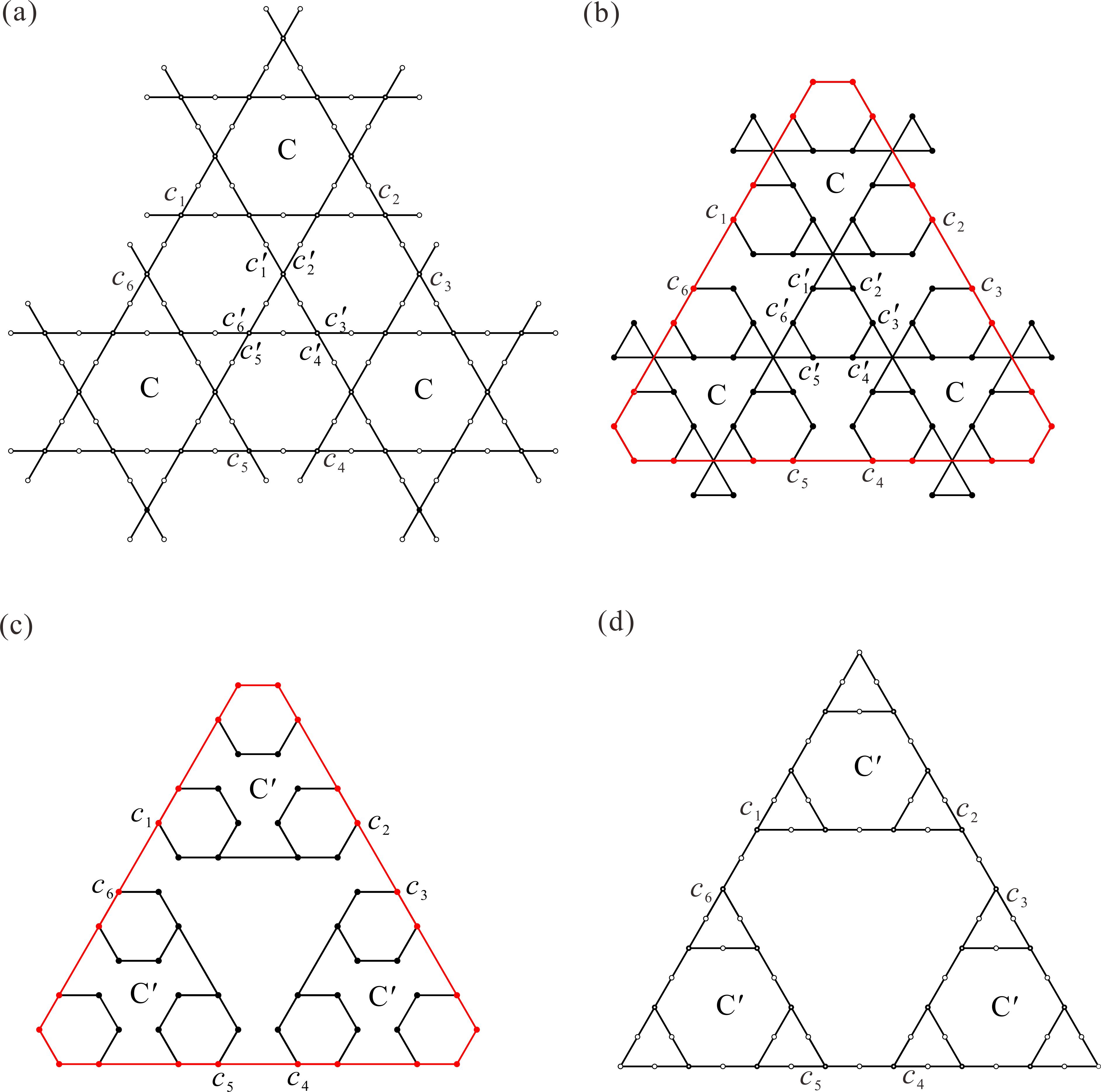
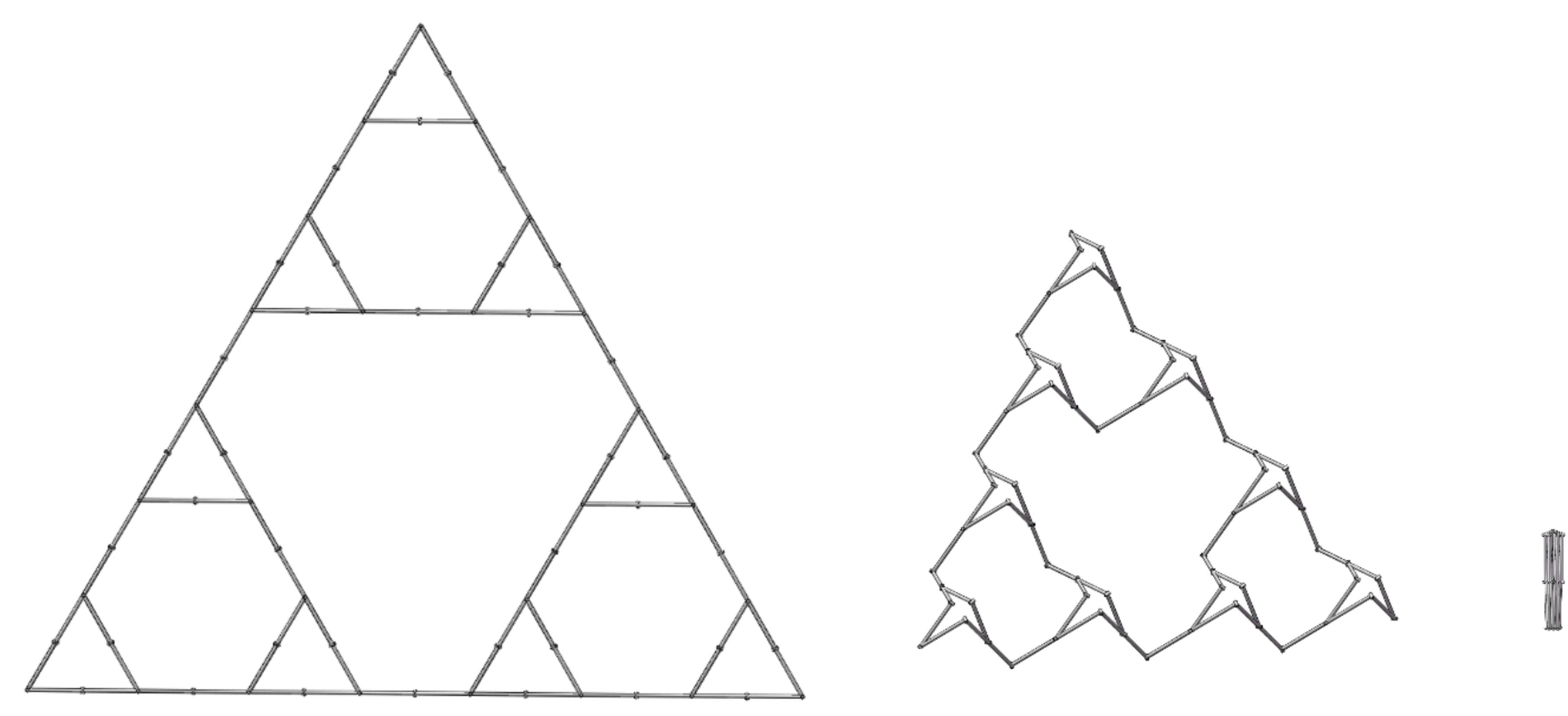
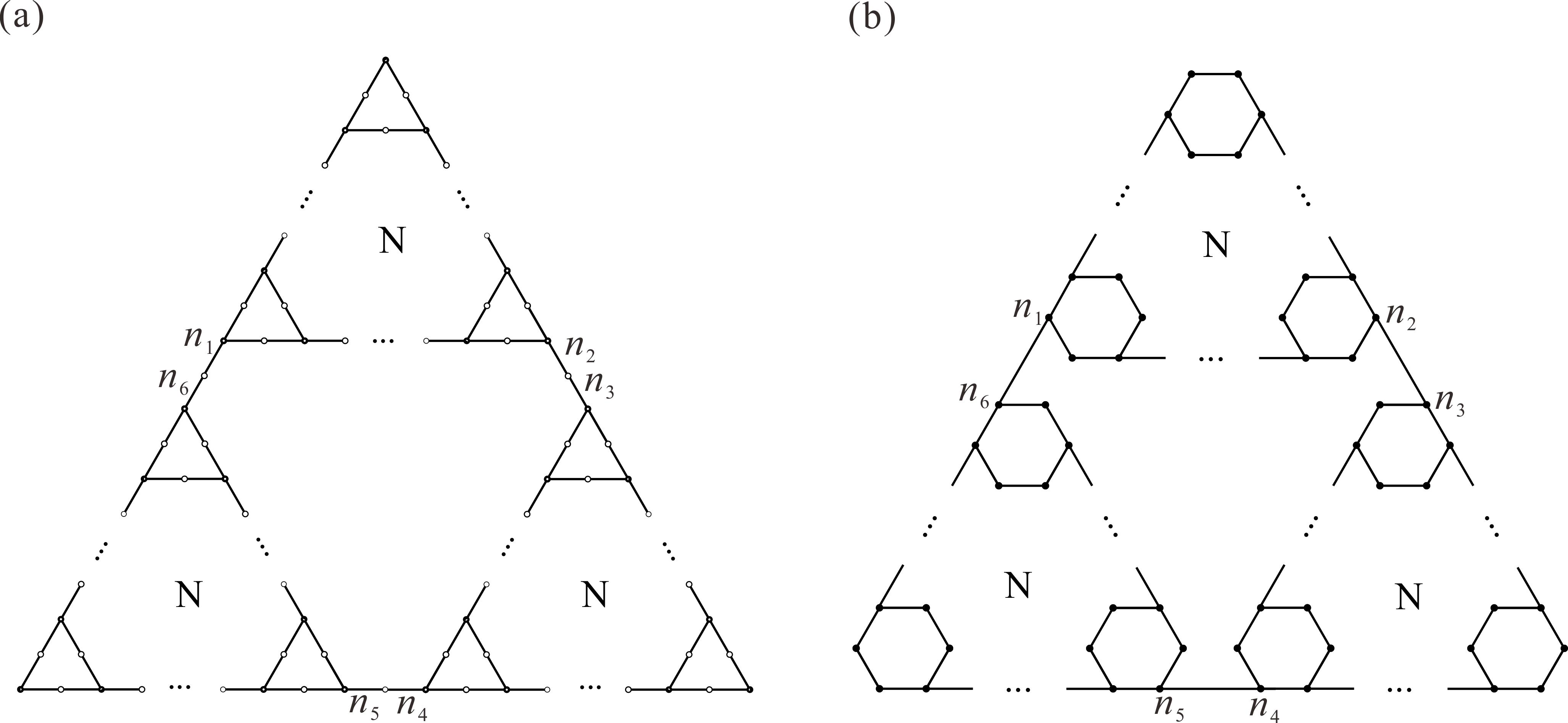
From: Date: 2026-03-11 Overconstrained mechanisms can achieve large deployment ratios with fewer rigid links and obtain higher stiffness, showing broad application prospects in the design of large-scale space deployable structures. However, the ideal geometric constraint conditions in overconstrained mechanism networks are difficult to satisfy. The presence of numerous overconstraints generates additional internal loads, leading to hindered or even impossible movement of the deployable structure, thereby reducing its reliability. Therefore, it remains a significant challenge to downgrade the original overconstrained mechanism networks into less-overconstrained mechanism networks while preserving the original deployable motion through kinematic strategies. Recently, the research team of Prof. Chen Yan from the School of Mechanical Engineering at Tianjin University took the threefold-symmetric Bricard linkage networks as the research object, and performed mechanism topology simplification operations, constructing a less-overconstrained one-DOF mechanism network with motion equivalence. This work was published online in the Journal of Mechanisms and Robotics on February 24, 2026. The corresponding author of the paper is Prof. Chen Yan of Tianjin University, and the first author is Dr. Gu Yuanqing. This research was supported by the National Natural Science Foundation of China and the Tencent Foundation. Using the threefold-symmetric Bricard linkage as the basic unit, a one-DOF mechanism network can be constructed based on the mechanism network motion coordination theory and the geometric covering method, as shown in Figure 1. From the mechanism schematic and topology diagram, it can be seen that this one-DOF mechanism network contains 24 links and 30 revolute joints, with the overconstraints of 13. Figure 1 One-DOF threefold-symmetric Bricard mechanism network On this basis, overconstraint reduction in multi-loop mechanism networks is achieved through mechanism topology variation strategies. First, the reduction prerequisites for mechanism networks are proposed: (1) the kinematic characteristics, including the degree of freedom, remain unchanged; (2) the geometric dimensions of the outer contour after deployment remain essentially unchanged; (3) each point in the topology diagram requires at least two connections to form a closed-loop mechanism. For this purpose, the mathematical concept of a Hamiltonian path is introduced, as shown by the red line in Figure 2a. Observing the topology diagram of the mechanism network, the reduction prerequisites mainly involve three A linkages and only one hinge of each B linkage. Therefore, an attempt is made to remove the redundant links and hinges at the three B linkages. The simplified topology diagram is shown in Figure 2b) containing only three A linkages, with adjacent mechanisms connected by only one hinge. Figure 2 Topological reduction of the mechanism network Mapping the topology diagram to the mechanism schematic, the less-overconstrained mechanism network after removing redundant constraints is shown in Figure 3a, with its deployment area essentially unchanged. Furthermore, a less-overconstrained mechanism network with a regular geometric shape can be obtained (Figure 3b). Using screw theory to verify the degree of freedom of the simplified mechanism network, it is proven that the less-overconstrained mechanism network retains the original one-DOF threefold-symmetric motion characteristics. While achieving motion equivalence, the overconstraint number in the mechanism network is reduced from 13 to 4. Its folding process is shown in Figures 3c and 3d. Figure 3 One-DOF threefold-symmetric Bricard mechanism network after overconstraint reduction Using the original mechanism network in Figure 1 as the building unit C, a large-scale Bricard mechanism network as shown in Figure 4a can be constructed, also exhibiting one-DOF threefold-symmetric motion characteristics. Based on the overconstraint reduction strategy, the topology diagram of the large-scale mechanism network and the reduction prerequisite (red line) are shown in Figure 4b, ensuring that the deployment working area of the simplified large-scale mechanism network remains essentially unchanged. Then, based on the less-overconstrained form of building unit C (Figure 2b), the three building units C in this large-scale network are respectively simplified into one-DOF less-overconstrained building units C' (Figure 4c), ultimately constructing the large-scale less-overconstrained Bricard mechanism network shown in Figure 4d. Here, adjacent one-DOF less-overconstrained building blocks are connected by only one revolute hinge. The obtained large-scale mechanism network also maintains the original one-DOF threefold-symmetric motion characteristics (Figure 5), and the overconstraint number is reduced from the original 55 to 13. Furthermore, the overconstraint reduction strategy can be extended to multi-level, ultra-large-scale Bricard mechanism networks, as shown in Figure 6, significantly removing redundant constraints within the ultra-large-scale mechanism network. Figure 4 Overconstraint reduction of the large-scale Bricard mechanism network Figure 5 Folding process of the large-scale less-overconstrained Bricard mechanism network Figure 6 Overconstraint reduction of multi-level Bricard mechanism networks In summary, this work proposes an overconstraint reduction strategy for complex mechanism networks based on mechanism topology variation methods, constructing a less-overconstrained form of the threefold-symmetric Bricard mechanism network while preserving the original one-DOF threefold-symmetric motion characteristics. By altering the topological configuration of the mechanism, this paper constructs a new mechanism network that is kinematically equivalent to the original one, providing ideas for reducing the overconstraint degree in mechanism networks and offering a theoretical foundation and technical reserve for the application of less-overconstrained mechanism networks in large-scale space deployable structures.
Yuanqing Gu, Jiayao Ma, Yan Chen*. Overconstraint reduction for mechanism networks of threefold-symmetric Bricard linkages. Journal of Mechanisms and Robotics. 2026, 18(4): 044501. |