|
New Publication: Mechanism and Machine Theory – Dr. Mengyue Li published Kinematic synthesis of single-DOF tubular origami structures composed of 4-crease vertices
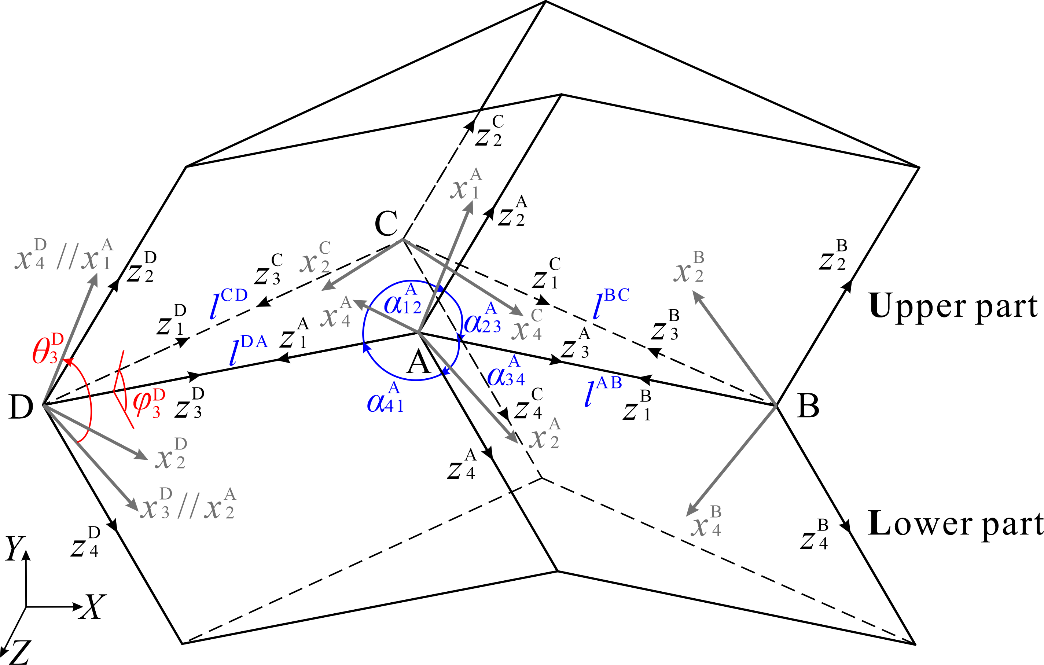
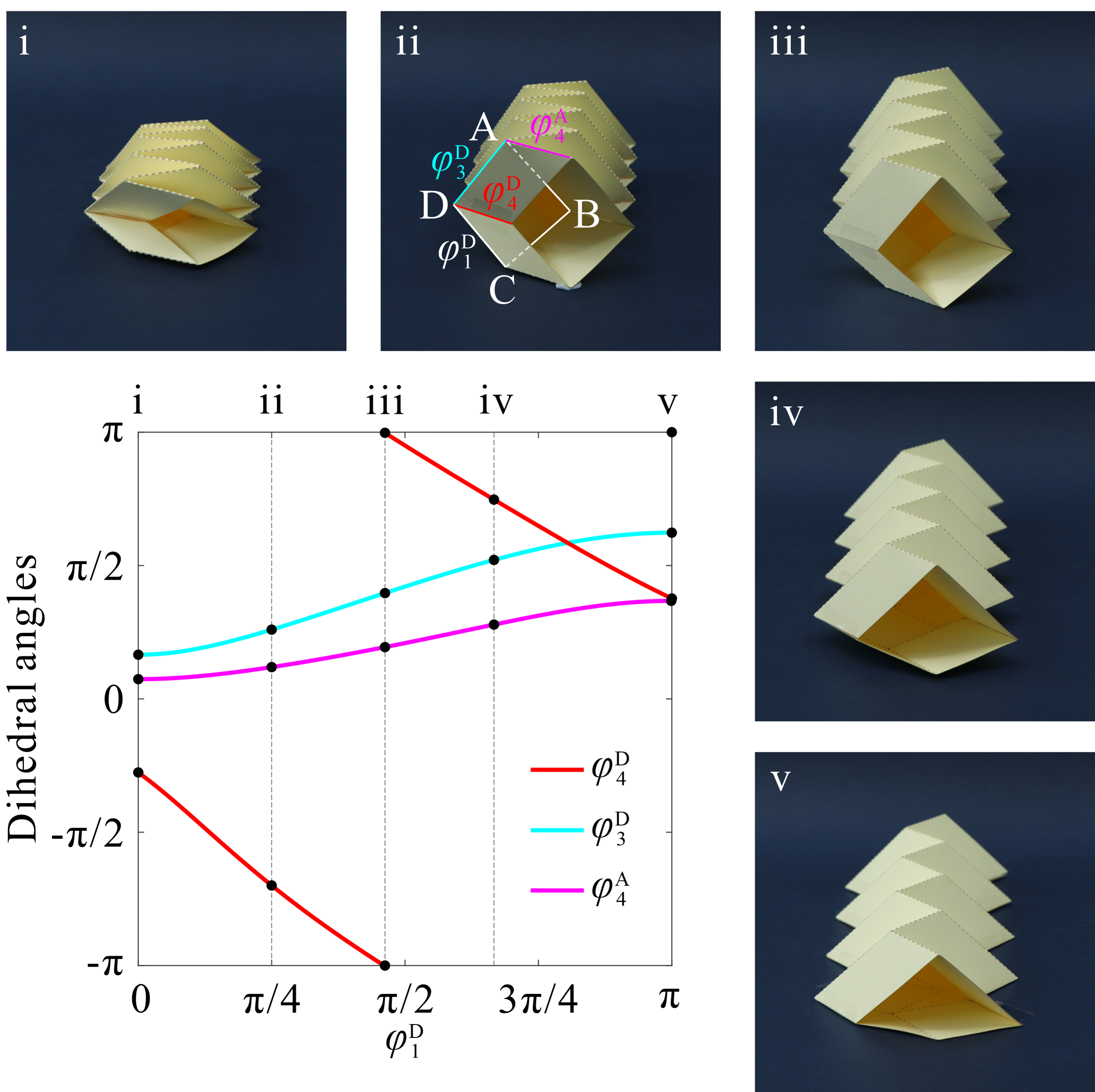
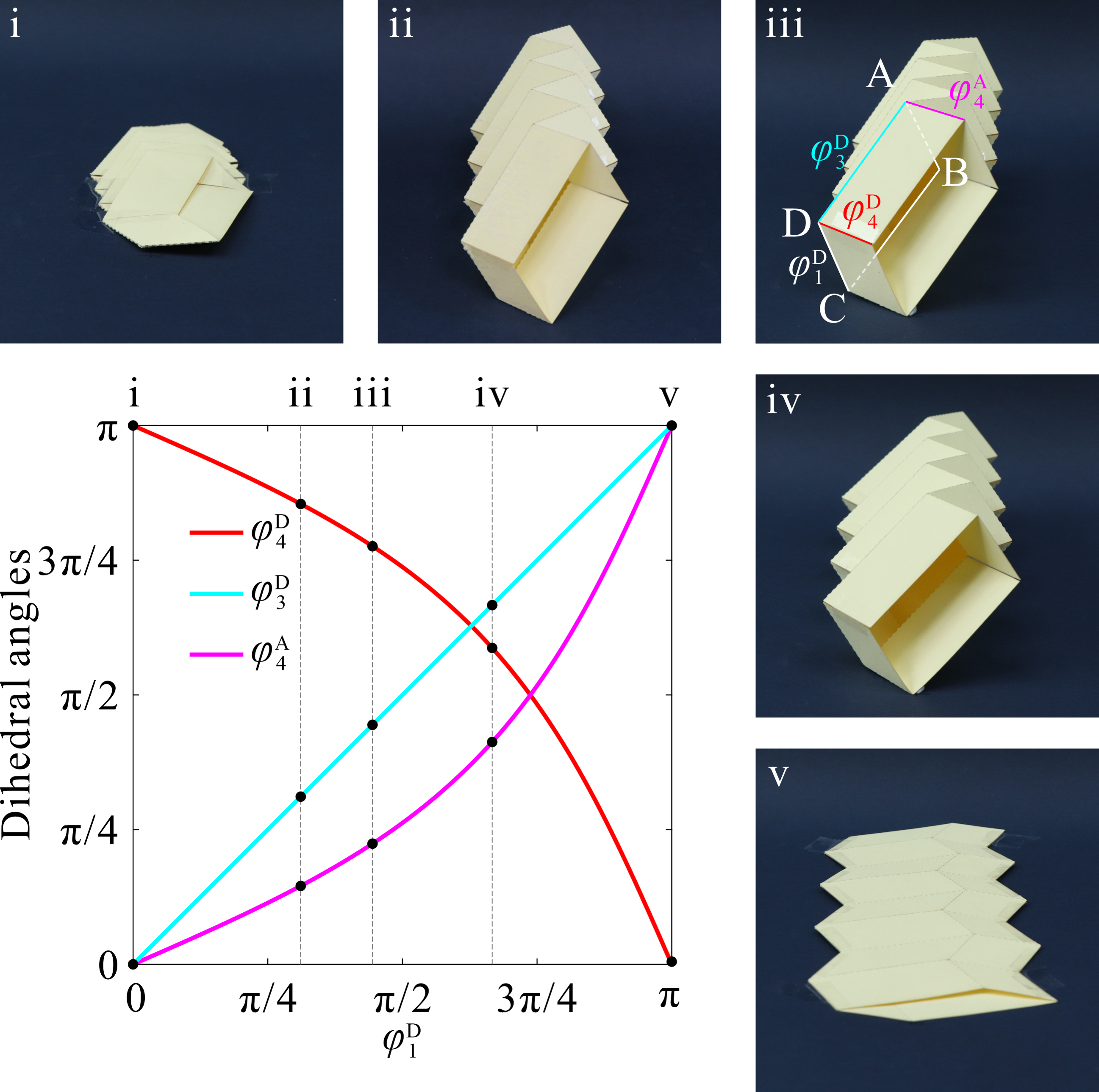
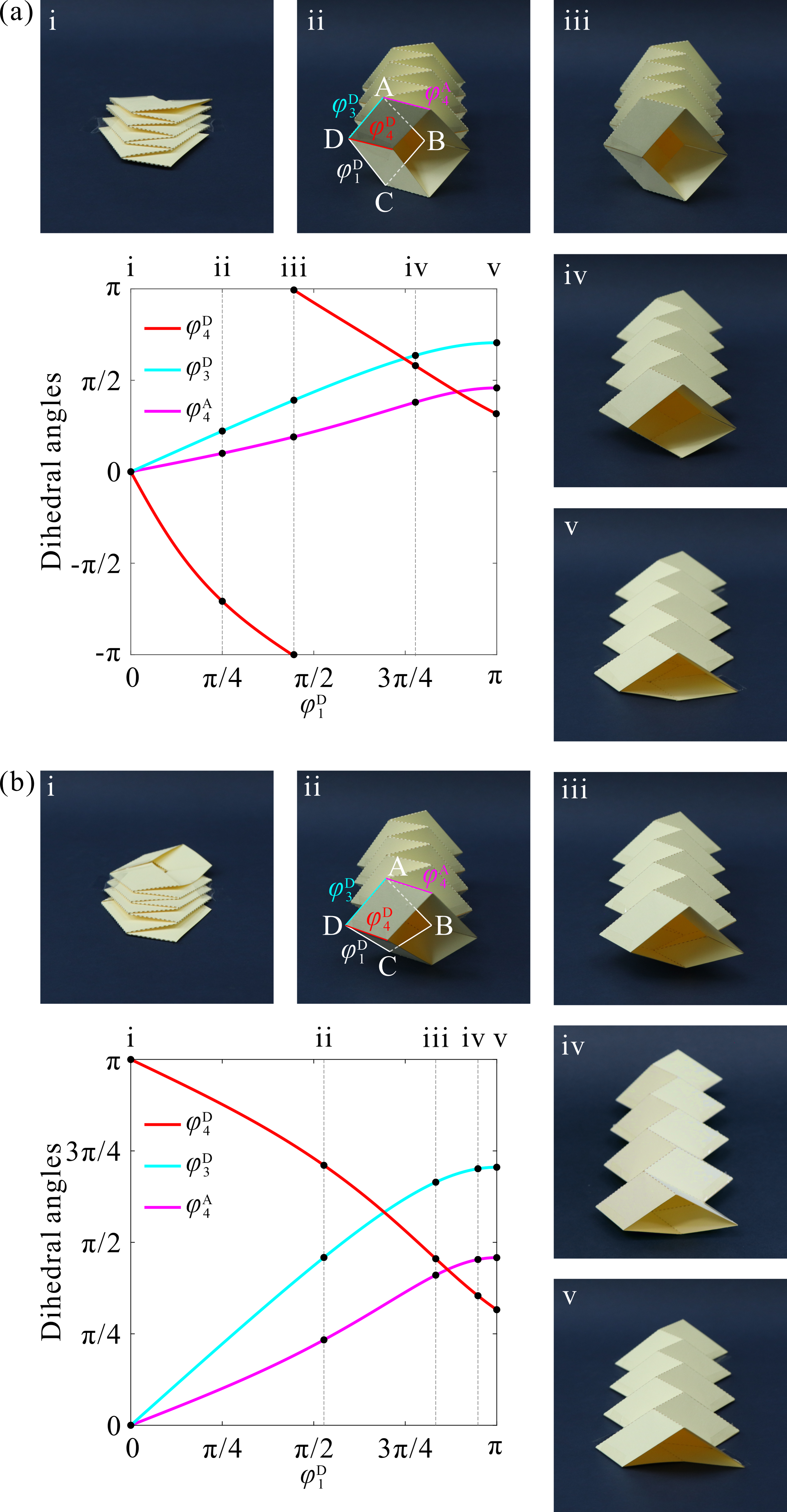
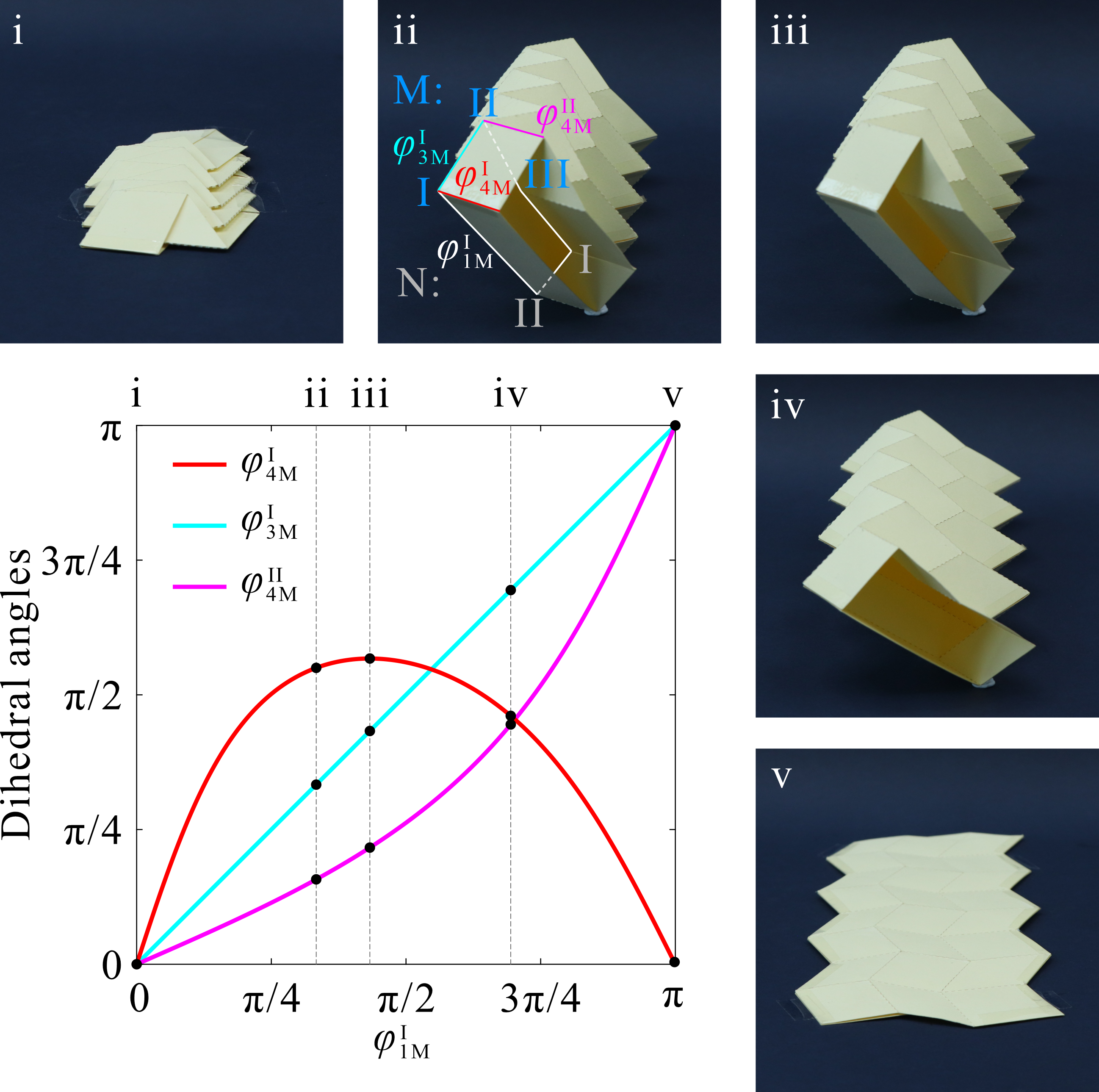
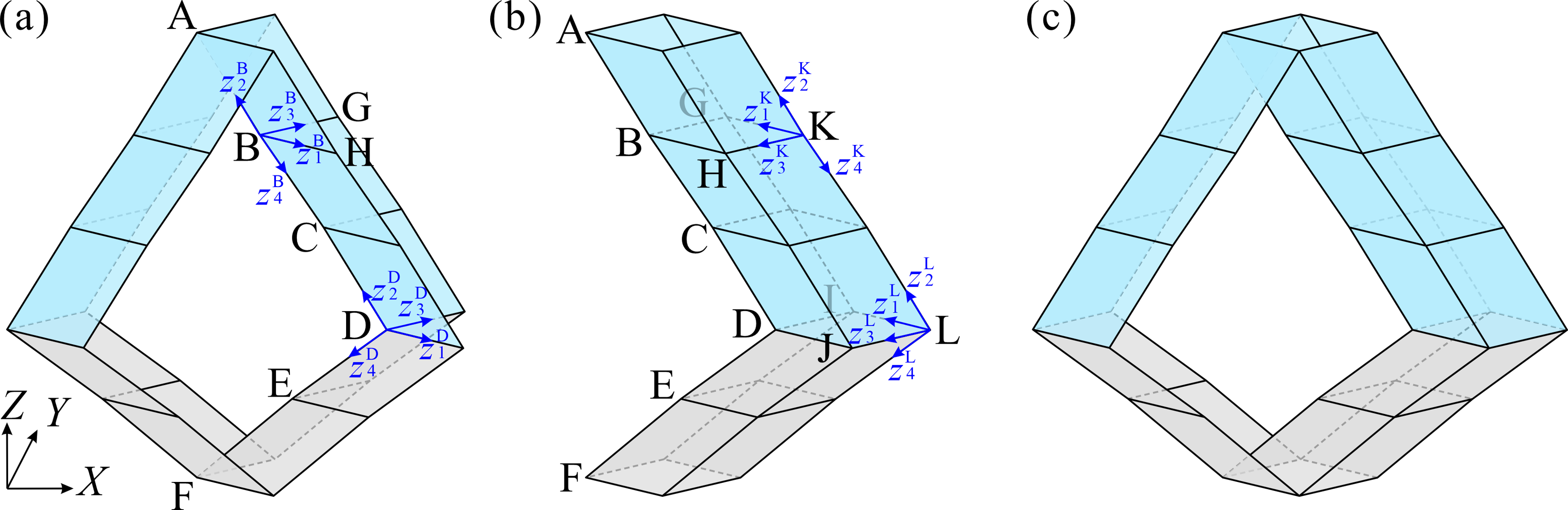
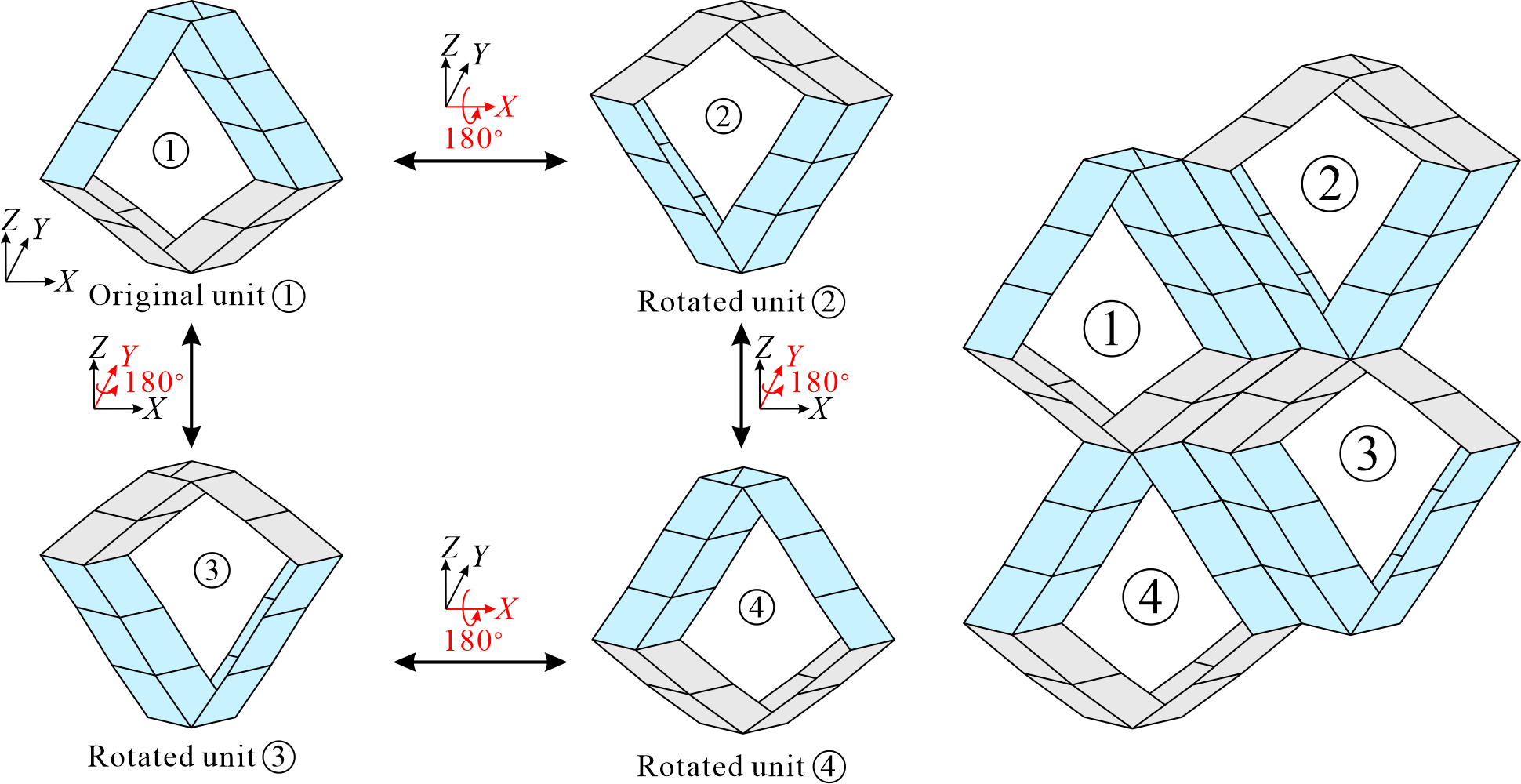
From: Date: 2026-06-15 Origami structures, which transform two-dimensional sheets into three-dimensional configurations through folding, have evolved from an artistic practice into a powerful engineering design methodology. Among various origami-inspired systems, tubular origami structures have attracted significant attention due to their high deployment ratio, diverse deformation modes, and customizable cross-sectional geometries. With the rapid development of metamaterials, the spatial tessellation of tubular origami units has further enabled the creation of novel origami metamaterials exhibiting unique kinematic behaviors and extraordinary physical properties. However, the design of existing tubular origami structures largely relies on modifications and combinations of known origami units, and their geometries are often constrained by strict compatibility requirements. In particular, most theoretical studies assume that the cross-sections remain planar polygons, which significantly limits the accessible design space. Therefore, establishing a general theoretical framework for the systematic design and kinematic synthesis of complex spatial tubular origami structures remains an important challenge in this field. To address this challenge, a research team led by Professor Yan Chen and Professor Jiayao Ma from the School of Mechanical Engineering, Tianjin University, proposed a kinematic synthesis method for tubular origami structures based on loop-closure constraints. The study establishes a generalized kinematic synthesis framework for single-degree-of-freedom tubular origami structures composed of 4-crease vertices, enabling the design of rigid-foldable tubular origami structures with spatial polygonal cross-sections. The framework is further extended to multi-vertex tubular origami structures and double-tubular origami metamaterials. The work was published online in Mechanism and Machine Theory on June 5, 2026. The corresponding author is Professor Yan Chen, and the first author is doctoral student Mengyue Li. Professor Jiayao Ma and Dr. Yuanqing Gu also contributed to this research. This work was supported by the National Natural Science Foundation of China. The research first considers a closed-loop origami assembly composed of four 4-crease vertices (Fig. 1). By integrating the Denavit–Hartenberg kinematic method with spatial loop-closure equations, a comprehensive kinematic model was established. Unlike existing studies, the proposed framework removes the conventional restriction that the cross-section must remain a planar polygon and allows spatial quadrilateral cross-sections. Through analytical solutions of the compatibility conditions, two classes of single-DOF tubular origami structures were identified: Fig. 1. Kinematic model of a tubular origami structure composed of four 4-crease vertices. Case 1: Fig. 2. Tubular origami structure with a spatial quadrilateral cross-section. Case 2: Fig. 3. Tubular origami structure with a parallelogram cross-section. Building upon the derived compatibility conditions, the team further established the geometric criteria required for flat-foldability. By varying the geometric parameters, multiple flat-foldable tubular origami structures with spatial quadrilateral cross-sections were constructed (Fig. 4). The results demonstrate that diverse folding behaviors and kinematic characteristics can be precisely programmed through geometric parameter tuning, providing extensive design flexibility for complex origami mechanisms. Fig. 4. Folding processes of tubular origami structures with spatial quadrilateral cross-sections. To further broaden the applicability of the framework, the researchers extended the analysis to complex tubular origami structures composed of multiple 4-crease vertices. By decomposing the structure into multiple geometric chains and establishing generalized compatibility conditions through loop-closure constraints, a systematic kinematic design methodology for complex spatial configurations was developed. Based on this framework, a series of tubular origami structures with spatial polygonal cross-sections were successfully designed (Fig. 5), substantially expanding the design space of conventional tubular origami structures. Fig. 5. Tubular origami structures featuring complex spatial polygonal cross-sections. Based on the established theoretical framework, the research team further explored the design of complex origami metamaterials. A single-tubular origami structure was first constructed, and a secondary tubular structure was subsequently introduced through geometric coupling along its boundary, resulting in a novel double-tubular origami structure (Fig. 6). Theoretical analysis revealed that the two tubular subsystems are kinematically coupled through shared boundaries while maintaining a single-DOF motion. Furthermore, once the geometric parameters of the primary structure are specified, the geometry of the secondary structure is uniquely determined, ensuring motion compatibility and rigid foldability throughout the system. Fig. 6. Design process of the double-tubular origami structure. Since the double-tubular unit lacks inherent symmetry, direct periodic assembly cannot guarantee geometric continuity. To overcome this challenge, the researchers proposed a rotational tessellation strategy (Fig. 7). By spatially rotating the fundamental unit, a series of complementary configurations can be generated and assembled according to specific connectivity rules, ultimately forming large-scale three-dimensional origami metamaterials. Fig. 7. Double-tubular origami metamaterial and its rotational tessellation strategy. In summary, this work establishes a generalized kinematic synthesis framework for tubular origami structures composed of 4-crease vertices. By eliminating the traditional assumption of coplanar cross-sections, the framework significantly expands the accessible design space and enables the systematic design of tubular origami structures, complex multi-vertex configurations, and double-tubular origami metamaterials. The proposed methodology provides a versatile theoretical foundation for the design of deployable structures, origami-inspired mechanisms, and origami metamaterials, and offers promising opportunities for future applications in aerospace deployable systems, soft robotics, and reconfigurable metamaterials.
Mengyue Li, Yuanqing Gu, Jiayao Ma, Yan Chen*. Kinematic synthesis of single-DOF tubular origami structures composed of 4-crease vertices, Mechanism and Machine Theory, 2026, 228, 106504. |