Actuators are materials and devices which can directly convert external energy to mechanical energy from thermal, electric chemical, manganic, and various other stimuli. They are proposed to be an alternative mechanical energy source for modern intelligent mechanical device applications, such as soft robots, wearable rehabilitation training. For many years, we have being focus on developing powerful artificial muscles, novel multi-functional morphing actuators and discovering new type of application including smart textile, drug delivery and especially soft robotics.
1 Powerful artificial muscles
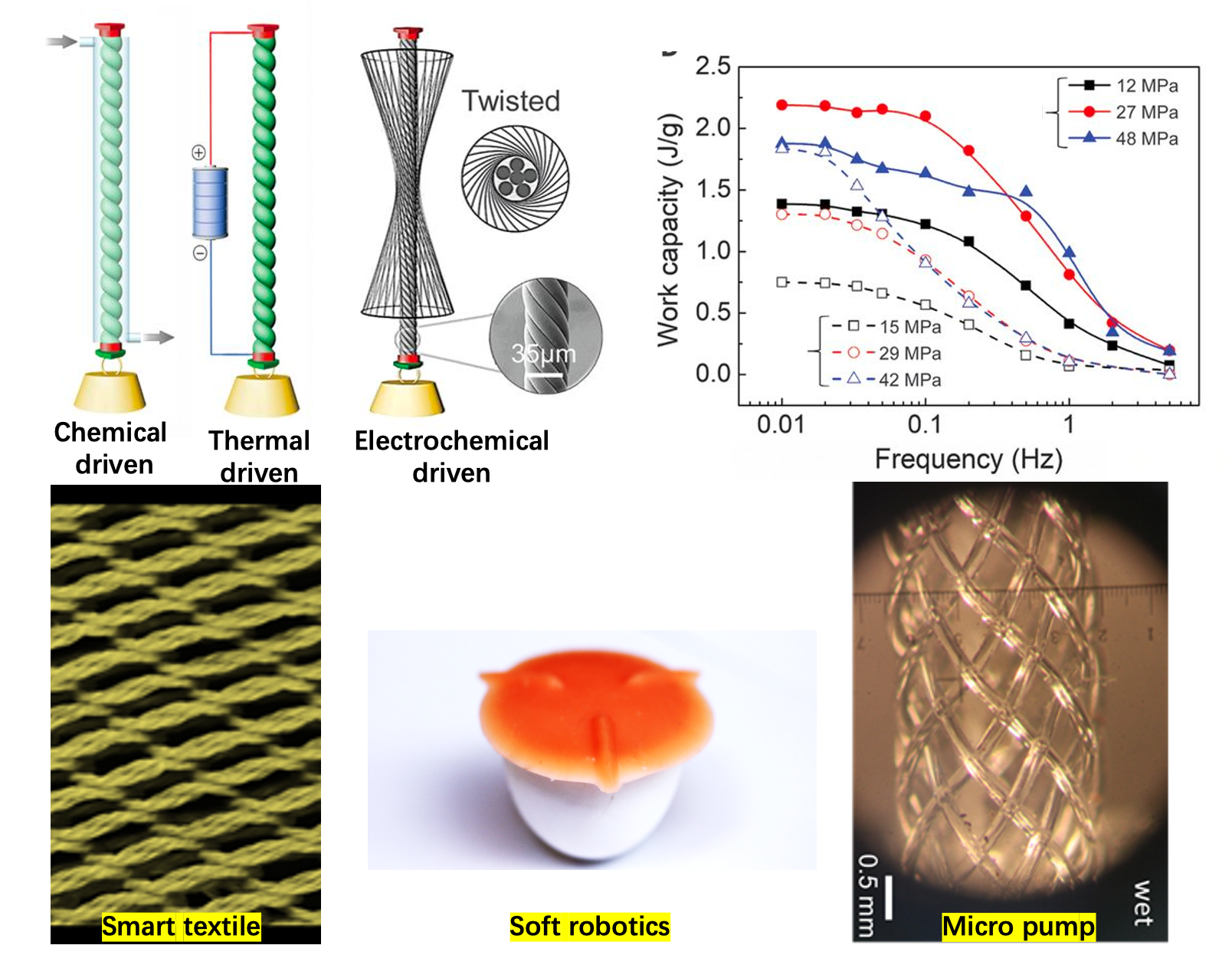
Remarkable performance has been obtained for tensile and torsional guest-filled hybrid yarn muscles, whose actuation is driven by the volume change of a guest within a twisted or coiled yarn or fibers. However, they also have problems such as the materials are expensive and yarn guest near yarn center does not efficiently contribute to actuation. We eliminated this problem by driving the muscle using a sheath called Sheath-run artificial muscles (SRAM), which can be on an inexpensive coiled yarn or fiber core. The sheath on our new sheath-run electrochemical muscle generates 1.98 kW/kg of average power during muscle contraction - 40 times that for human muscle and 3.0 times that of a typical turbocharged V8 diesel engine (Science, 2019, 365(6449), 150–155).
Among the above artificial muscles which powered by thermal, electrothermal, absorption and electrochemical power source. Electrochemically driven muscles are especially important, since their efficiencies are not restricted by the Carnot limit of thermal muscles and they can have a natural latching state, meaning they can maintain stroke with low input energy. While Previous electrochemical carbon nanotube yarn muscles cannot be usefully operated between the extreme potentials of the electrochemical stability window, since the muscle’s stroke during electron and hole injection partially cancel. We discovered unipolar stroke carbon nanotube yarn muscles in which muscle stroke changes between extreme potentials are additive and muscle stroke remarkably increases with increasing potential scan rate. Record muscle strokes, contractile work-per-cycle, contractile power densities, and energy conversion efficiencies are obtained for unipolar muscles having scan-rate enhanced stroke (Science, 2021, 371(6528), 494–498).
Multi-driven artificial muscles and their applications
2 Multi-functional actuators
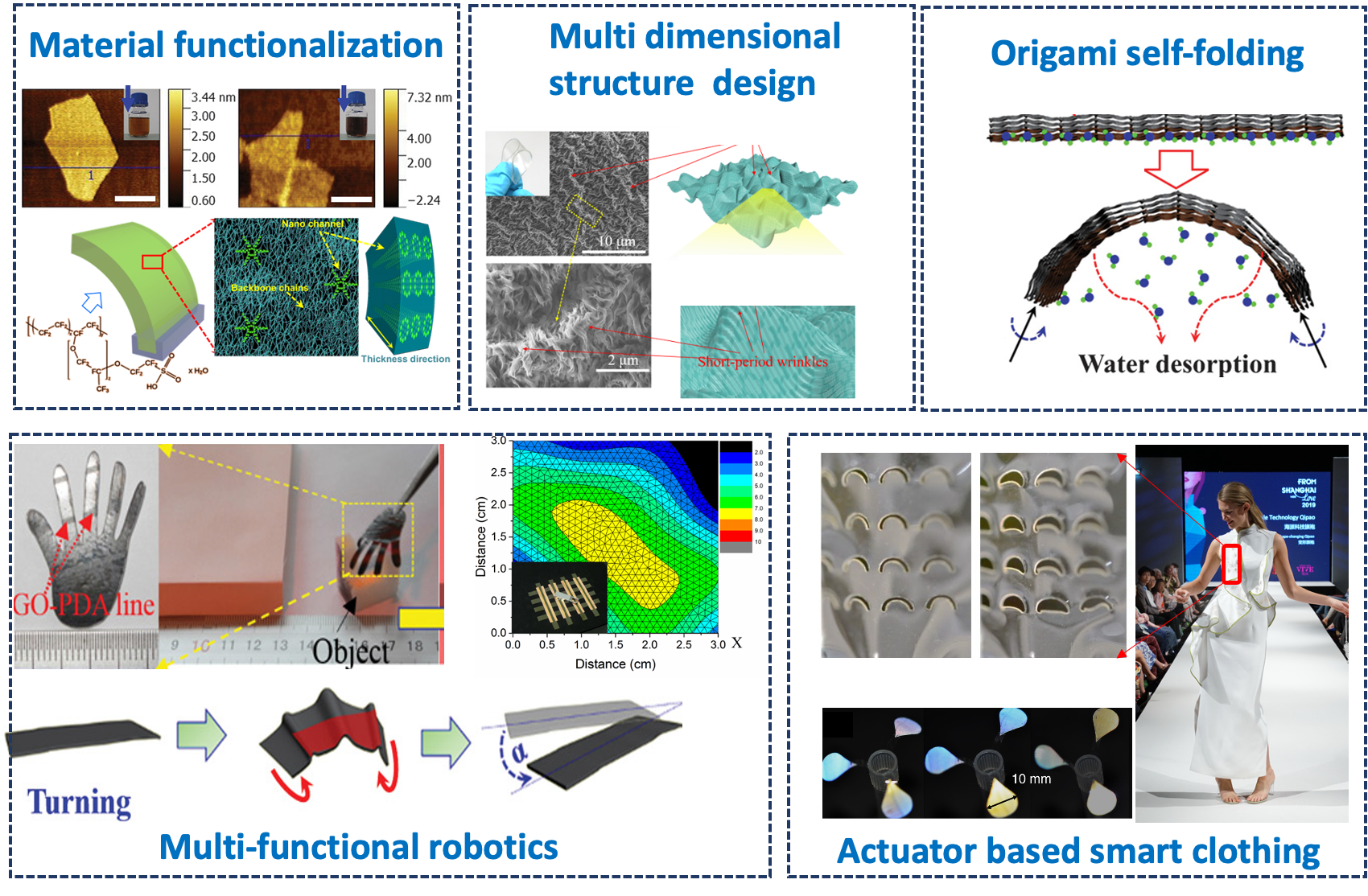
Besides powerful artificial muscle we also deployed research on multi-functional morphing actuators. In particular, a kirigami and origami-inspired single-layer actuator was developed as a personal humidity and heat management system through a macroscale geometric design, and a bilayer stimuli-responsive actuator with multicolor switching capability was achieved through chemical modification of the surface. These intrinsically deformable soft actuators represent an excellent platform for the future development of smart materials for human–environment interface applications.